JAKA Zu sp使用手册-中文版.pdf - 第3页
JAKA Zu Sp 3 目录 第 1 章 概述 ..................... ..................... ..................... ..................... .................... ..................... ..................... ................ 4 1.1 背景 ................…

2 JAKA Zu Sp
Z u s p
使 用 手 册
JAKA Zu sp
版 本 号 :

JAKA Zu Sp 3
目录
第 1 章 概述
..................................................................................................................................................................
4
1.1 背景
.....................................................................................................................................................................
4
1.2 目的
.....................................................................................................................................................................
4
第 2 章 产品描述
..........................................................................................................................................................
5
第 3 章 JAKA ZU SP 系统搭建
.....................................................................................................................................
6
第 4 章 JAKA ZU SP 使用
.............................................................................................................................................
7
第 5 章 JAKA ZU SP 使用注意事项
.........................................................................................................................
11
第 6 章 JAKA ZU SP 各型号转接法兰和力传感器尺寸
...........................................................................................
12
6.1 JAKA ZU3 SP
......................................................................................................................................................
12
6.2 JAKA ZU7 SP
......................................................................................................................................................
13
6.3 JAKA ZU12 SP 和 JAKA ZU18 SP
....................................................................................................................
15
4 JAKA Zu Sp
第 1 章 概述
1.1 背景
工业机械臂已经被广泛地运用到各种工业场景中,利用机械臂可以方便地进行零件抓取装配物料搬运
等工业应用,人机协作和人机交互是一个重要的发展方向。JAKA 小助系列协作机器人不仅致力于便携安全
地完成这些传统作业,同时注重操作过程中机器人与人和环境的交互,因此机器人安全防护越来越不可或
缺。
1.2 目的
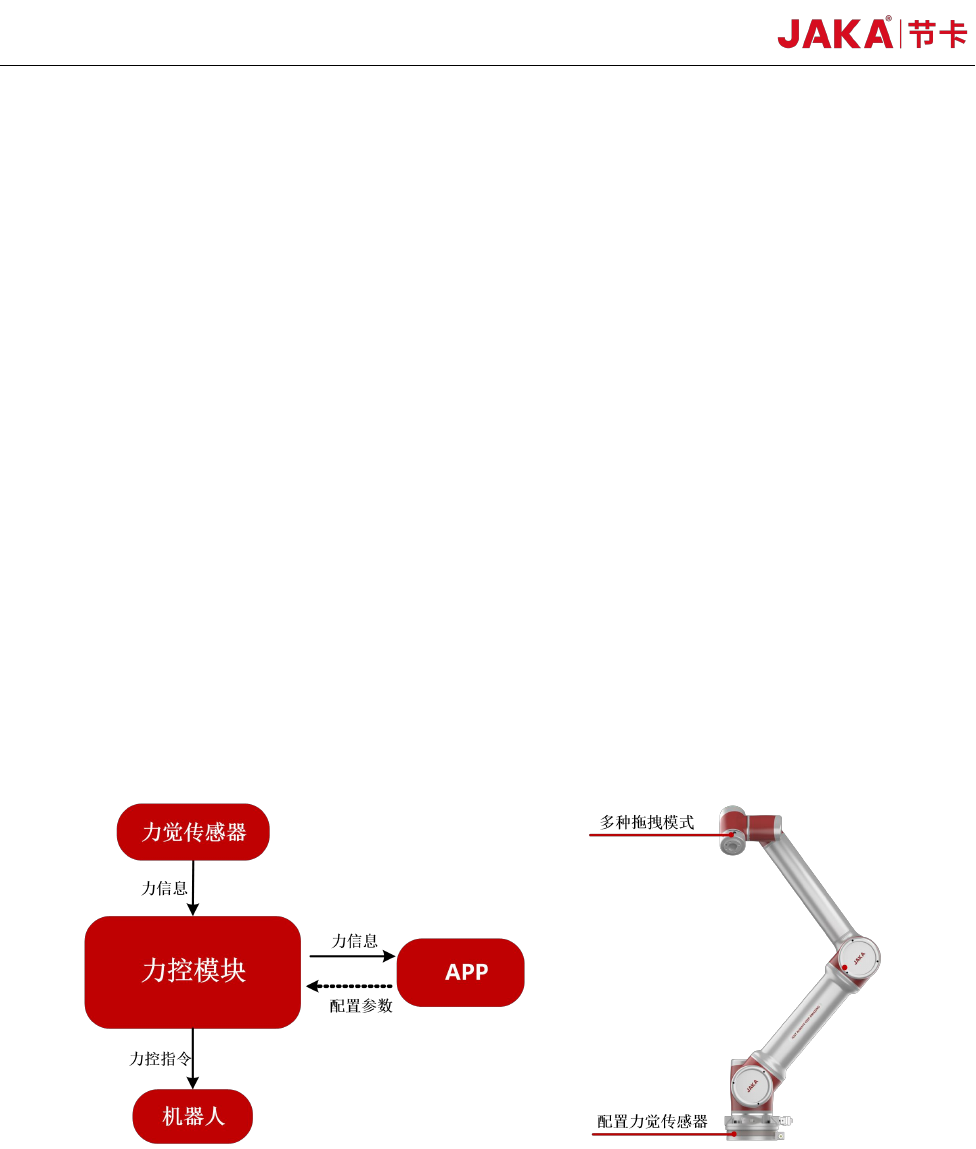
本产品旨在采用工业级的力觉传感器,并集成自主知识产权的力控算法,提高协作机器人本体的感知
能力,为客户提供更好的人机交互体验和安全保障。如图 1 所示,将力觉传感器安装在机器人的底座,实
时将力值传给控制器,当机器人本体或者末端夹具受到外力时,力控模块会即时做出判断并让机器人停止
运动,保证人和机器的安全。同时,客户可以在机器人本体的任意部位,实现工作空间三个方向的位置牵
引示教工作。
图 1. JAKA Zu sp 功能示意图