20201214135309.pdf - 第12页
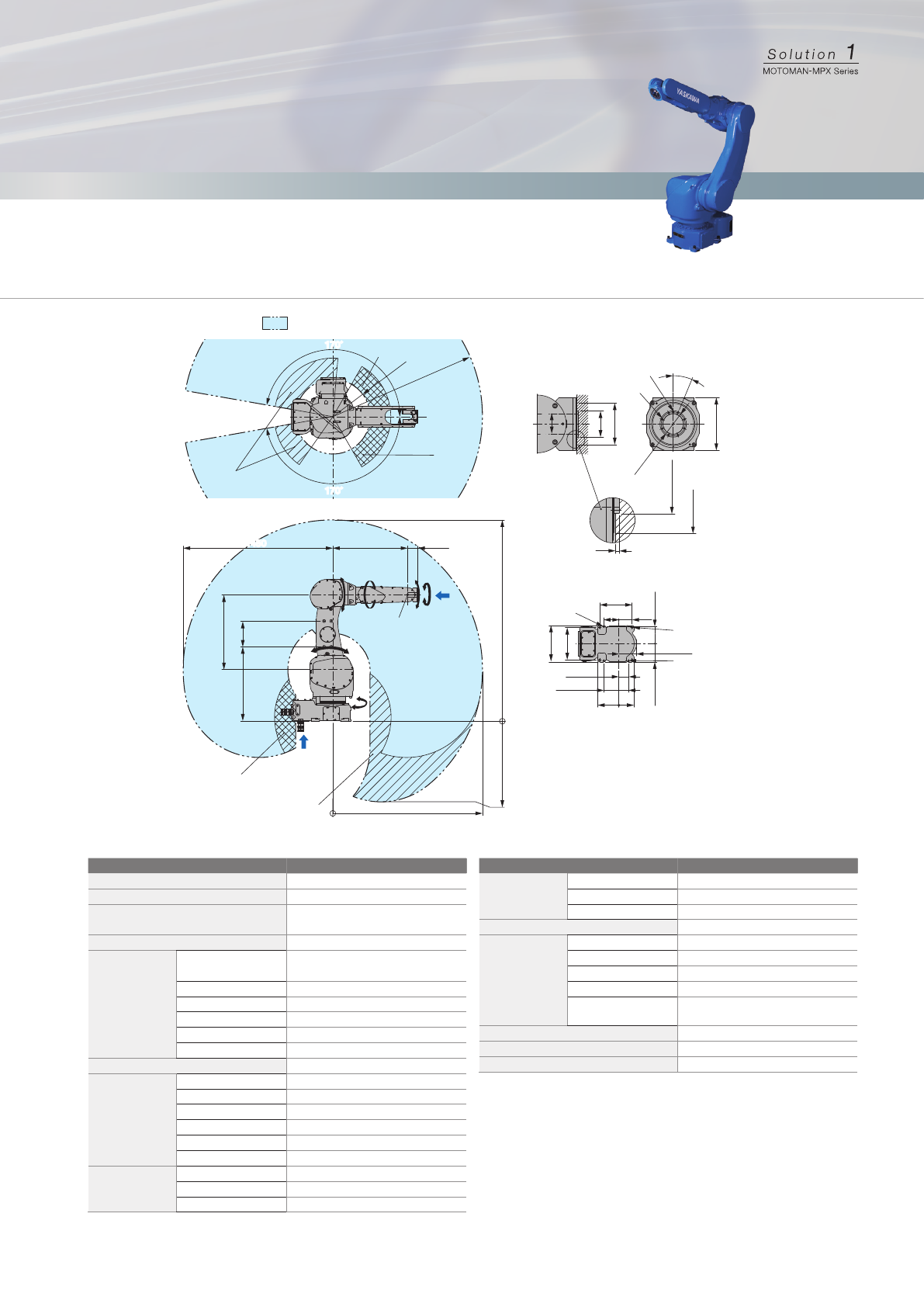
MOTOMAN - MPX Series Specications ■ 外形尺寸及动作范围 单位 : mm : P 点动作范围 Φ 116 2000 0 1907 2000 0 1643 1000 328 P 点 B R L S U 1000 600 518 240 240 240 240 205 ± 0 . 1 240 ± 0 . 1 240 ± 0 . 1 275 ± 0 . 1 275 ± 0 . 1 205 ± 0 . 1 2…
MOTOMAN
-
MPX Series Specications
■
外形尺寸及动作范围
单位
: mm
:
P
点动作范围
320
320
95
±
0.1
150
245
±
0.1
168
175
±
0.1
363
130
183
±
0.1
210
150
4
P点
725 100
R
1450
14501450
1450
780
725
720 250
1950
0
0
R
362
170
°
170
°
170
°
170
°
Φ100
Φ
58
L
U
R
B
T
S
*
1
*
1
*
1
*
2
*
2
50 dia.Φ50
22
.
5
°
128
(
Φ100
)
A
B
.
Φ64
Φ64
(
深
5
)
视角 B
视角 A
Φ4
(深6)
2×
Φ12
(铰孔)
4×
Φ18
(安装用孔
)
8×M4×P0.7
(深8)
M8×
P1.25
(接地用螺纹孔)
*1: S
轴动作范围在-
60˚ ~ +60˚
有动作限制。
*2: S
轴动作范围在
+85˚~ +170˚,
及
-
125˚~
-
170˚
有动作限制。
规格
MPX1950
型号
YR-MPX1950 -*00
构造 垂直多关节型(
6
自由度)
可搬质量
手腕
(T
轴
): 7 kg
手臂
(L/U
轴
):
共
3 kg
重复定位精度
*1 0.15 mm
工作范围
S
轴
(旋转)
-
170˚ ~ +170˚
(
壁挂式
:
-
90˚ ~
+
90˚)
L
轴
(下臂)
-
100° ~ +140°
U
轴
(上臂)
-
62° ~ +235°
R
轴
(手腕旋转)
-
200° ~ +200°
B
轴
(手腕摆动)
-
150° ~ +150°
T
轴
(手腕回转)
-
400° ~ +400°
最大速度
1.5 m/s
各轴最大速度
S
轴
(旋转)
3.14 rad/s, 180°/ s
L
轴
(下臂)
3.14 rad/s, 180°/ s
U
轴
(上臂)
3.14 rad/s, 180°/ s
R
轴
(手腕旋转)
6.28 rad/s, 360°/ s
B
轴
(手腕摆动)
6.98 rad/s, 400°/ s
T
轴
(手腕回转)
8.72 rad/s, 500°/ s
容许力矩
R
轴
(手腕旋转)
19.6 N·m (2.0 kgf·m)
B
轴
(手腕摆动)
19.6 N·m (2.0 kgf·m)
T
轴
(手腕回转)
9.8 N·m (1.0 kgf·m)
*1: JIS B 8432
为基准。
*2:
根据本表中的国际规格。有关认证情况,请向我们咨询。
*3:
因用途、动作模式而异。
*4:
倒装式、壁挂式为选配。
注
:
本表记载的是
SI
单位。
规格
MPX1950
容许惯性力矩
(
GD
2
/4
)
R
轴
(手腕旋转)
0.6 kg·m
2
B
轴
(手腕摆动)
0.6 kg·m
2
T
轴
(手腕回转)
0.16 kg·m
2
本体质量
265 kg
设置环境
温度
0 ˚C ~ +40 ˚C
湿度
20% ~ 80%RH (
无结露
)
振动加速度
4.9 m/s
2
(0.5 G)
以下
标高
1000 m
以下
其他
远离电气噪音源
不发生强磁场
防爆规格
*2 TIIS (
日本
), FM (
北美
)
电源容量
*3 1.75 kVA
以下
设置方式
*4
置地式、倒挂式、壁挂式
· 可安装非静电型小型环杯等小型喷涂枪,实现高品质喷涂
· 通过中空手臂 , 小型环杯型喷枪无需偏置即可安装
适用一般产业用途
MPX1950
最大臂展
: 1450 mm
负载
:
手腕
(T
轴
) 7 kg,
手臂
(L/U
轴
)
共
3 kg
11
MOTOMAN
-
MPX Series Specications
■
外形尺寸及动作范围
单位
: mm
:
P
点动作范围
Φ116
2000
0
1907
2000
0
1643
1000328
P点
B
R
L
S
U
1000600
518
240240
240 240
205
±
0
.
1
240
±
0
.
1
240
±
0
.
1
275
±
0
.
1
275
±
0.1
205
±
0
.
1
275
±
0
.
1
275
±
0
.
1
275
±
0
.
1
180
98.7
21.5
±
0.1
51 51
Φ140
Φ
102
视角 B
视角 A
R
522
R
2000
150
°
150
°
A
B
T
2×Φ12
(深8)
4×
Φ22
6×M6×P1.0
(深12)
2×
Φ5.2
(深10)
规格
MPX2600
型号
YR-MPX2600-*00
构造 垂直多关节型(
6
自由度)
最大负载
手腕
(T
轴
)
;
15 kg
手臂
(U
轴
): 20 kg
重复定位精度
*1 0.2 mm
工作范围
S
轴
(旋转)
-
150° ~ +150°
( 壁挂式: -
90˚ ~
+
90˚)
L
轴
(下臂)
-
65° ~ +130°
U
轴
(上臂)
-
65° ~ +150°
R
轴
(手腕旋转)
-
720° ~ +720°
B
轴
(手腕摆动)
-
720° ~ +720°
T
轴
(手腕回转)
-
720° ~ +720°
最大速度
2.0 m/s
各轴最大速度
S
轴
(旋转)
2.09 rad/s, 120°/ s
L
轴
(下臂)
2.09 rad/s, 120°/ s
U
轴
(上臂)
2.18 rad/s, 125°/ s
R
轴
(手腕旋转)
6.28 rad/s, 360°/ s
B
轴
(手腕摆动)
6.28 rad/s, 360°/ s
T
轴
(手腕回转)
6.28 rad/s, 360°/ s
容许力矩
R
轴
(手腕旋转)
93.2 N·m (9.5 kgf·m)
B
轴
(手腕摆动)
58.8 N·m (6.0 kgf·m)
T
轴
(手腕回转)
19.6 N·m (2.0 kgf·m)
规格
MPX2600
容许惯性力矩
(
GD
2
/4
)
R
轴
(手腕旋转)
3.75 kg·m
2
B
轴
(手腕摆动)
2.225 kg·m
2
T
轴
(手腕回转)
0.2 kg·m
2
手腕中空径
Φ70 mm
本体质量
485 kg
设置环境
温度
0 ˚C ~ +40 ˚C
湿度
20% ~ 80%RH (
无结露
)
振动加速度
4.9 m/s
2
(0.5 G)
以下
标高
1000 m
以下
其他
远离电气噪音源
不发生强磁场
防爆规格
*2
TIIS (
日本
), FM (
北美
),
ATEX (
欧洲
), KCs (
韩国
)
电源容量
*3 3.0 kVA
设置方式
*4
置地式、倒挂式、壁挂式
*1: JIS B 8432
为基准。
*2:
根据本表中的国际规格。有关认证情况,请向我们咨询。
*3:
因用途、动作模式而异。
*4:
倒装式、壁挂式为选配。
注
:
本表记载的是
SI
单位。
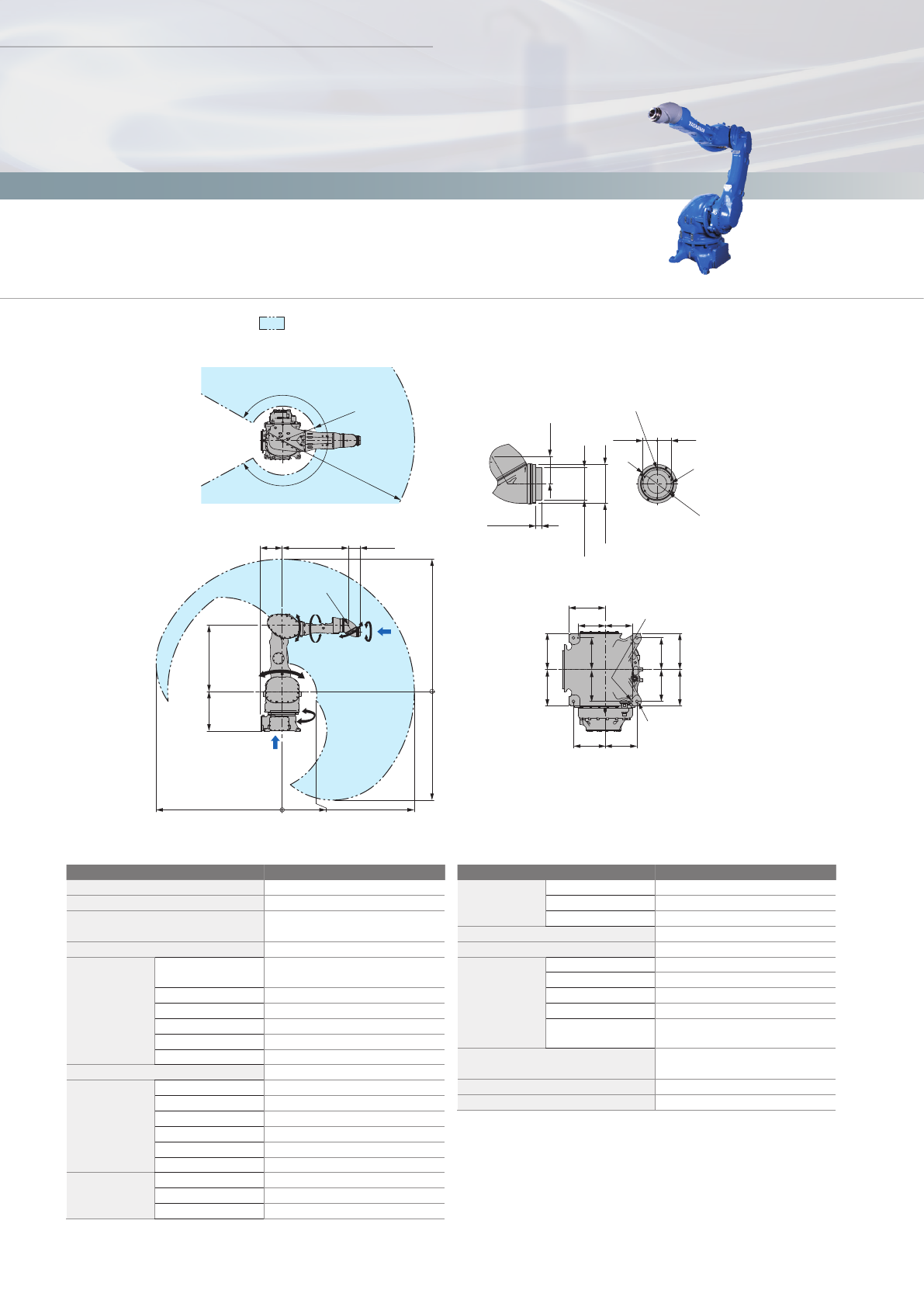
·
通过大口径中空手臂,防止涂料、气体管的干涉
·
负载
15kg
,可搭载多个喷枪及大型环杯型喷枪
·
因与
MPX3500
的手腕组件共通,可搭载大型喷枪
·
在
U
臂上确保颜色变更装置等喷涂设备的搭载空间
适用中型喷涂用途
MPX2600
最大臂展
: 2000 mm
负载
:
手腕
(T
轴
) 15 kg,
手臂
(U
轴
) 20 kg
12
MOTOMAN
-
MPX Series Specications
*1: S
轴动作范围在
+95˚ to +150˚,
及
−95˚ to −150˚
有动作限制
.
*2: S
轴动作范围在
+25˚ to +150˚,
及
−95˚ to −150˚
有动作限制。
L
轴动作范围在
−65˚ to +150˚
有动作限制。
.
■
外形尺寸及动作范围
单位
: mm
:
P
点动作范围
95
°
95
°
335
30
30
530
150150
150
5050
116 116
5151
视角 B
视角 A
21.5
±
0.1
U
L
800 1300
0
2700
2447
45014001400180
0
2700
2395
P点
*
1
*
2
A
B
*
2
*
1
*
2
R
2700
150
°
150
°
T
B
R
S
98.7
视角 C
250250
312
±
0
.
1 312
±
0
.
1
327
±
0
.
1327
±
0
.
1
566
116
±
0.1
450
365
±
0
.
1
(
85
)
(
85
)
13013025
277
±
0
.
1277
±
0
.
1
105
170170
235 30
C
Φ140
Φ116
Φ
102
2×Φ12
8×
Φ17.5
16×M6×P1.0
(深12)
4×M6×P1.0
(深15)
12×M5×P0.8
(深10)
6×M6×P1.0
(深12)
2×
Φ5.2
(深10)
*
下图为
YR-MPX3500-*0*
规格
MPX3500
型号
YR-MPX3500-*0*
YR-MPX3500-*1*
构造 垂直多关节型(
6
自由度)
最大负载
手腕
(T
轴
): 15 kg
手臂
(U
轴
): 25 kg*4
重复定位精度
*1 0.15 mm
工作范围
S
轴
(旋转)
-
150° ~ +150°
L
轴
(下臂)
-
65° ~ +140°
U
轴
(上臂)
-
65° ~ + 90°
R
轴
(手腕旋转)
-
720° ~ +720°
B
轴
(手腕摆动)
-
720° ~ +720°
T
轴
(手腕回转)
-
720° ~ +720°
最大速度
2.0 m/s
各轴最大速度
S
轴
(旋转)
1.75 rad/s, 100°/ s
L
轴
(下臂)
1.75 rad/s, 100°/ s
U
轴
(上臂)
1.92 rad/s, 110°/ s
R
轴
(手腕旋转)
5.24 rad/s, 300°/ s
B
轴
(手腕摆动)
6.28 rad/s, 360°/ s
T
轴
(手腕回转)
6.28 rad/s, 360°/ s
容许力矩
R
轴
(手腕旋转)
93.2 N·m (9.5 kgf·m)
B
轴
(手腕摆动)
58.8 N·m (6.0 kgf·m)
T
轴
(手腕回转)
19.6 N·m (2.0 kgf·m)
规格
MPX3500
容许惯性力矩
(
GD
2
/4
)
R
轴
(手腕旋转)
3.75 kg·m
2
B
轴
(手腕摆动)
2.225 kg·m
2
T
轴
(手腕回转)
0.2 kg·m
2
手腕中空径
Φ70 mm
本体质量
590 kg
设置环境
温度
0 ˚C ~ +40 ˚C
湿度
20% ~ 80%RH (
无结露
)
振动加速度
4.9 m/s
2
(0.5 G)
以下
标高
1000 m
以下
其他
远离电气噪音源
不发生强磁场
防爆规格
TIIS (
日本
), FM (
北美
),
ATEX (
欧洲
), KCs (
韩国
)
电源容量
*2 3.0 kVA
设置方式
*3
置地式、倒挂式、壁挂式
*1: JIS B 8432
为基准。
*2:
因用途、动作模式而异。
*3:
倒装式、壁挂式为选配。
*4:
搭载质量根据手腕、手臂搭载相关质量而不同。
注
:
本表记载的是
SI
单位。
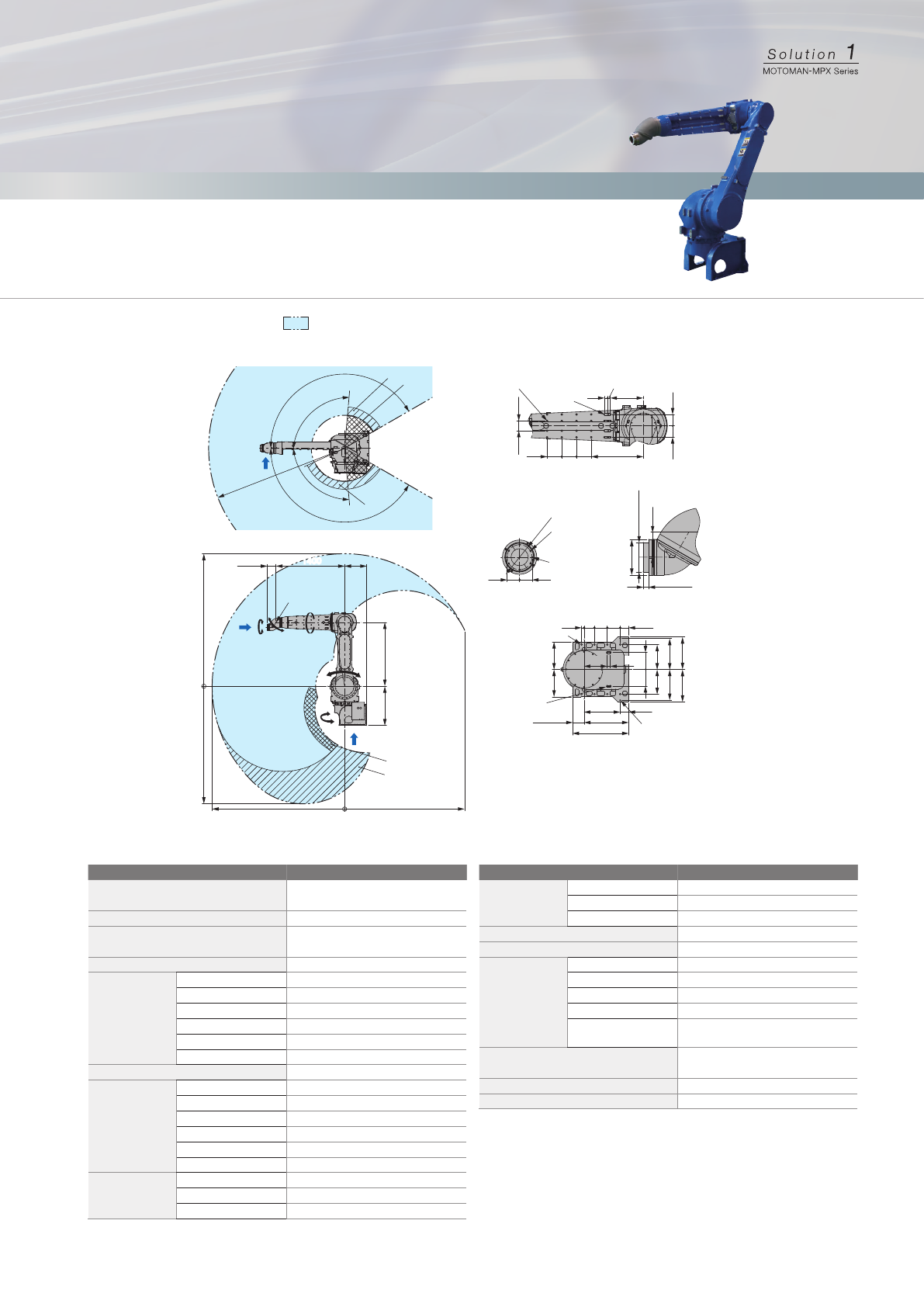
·
使用于汽车喷涂生产线的全方位设置型大型喷涂机器人
·
泵用外部轴和喷涂控制设备可内置于手臂内
·
备有左右对称机器人,示教数据也可对称变换使用
适用大型喷涂用途
MPX3500
最大臂展
: 2700 mm
负载
:
手腕
(T
轴
) 15 kg,
手臂
(U
轴
) 25 kg
13