20201214135309.pdf - 第6页
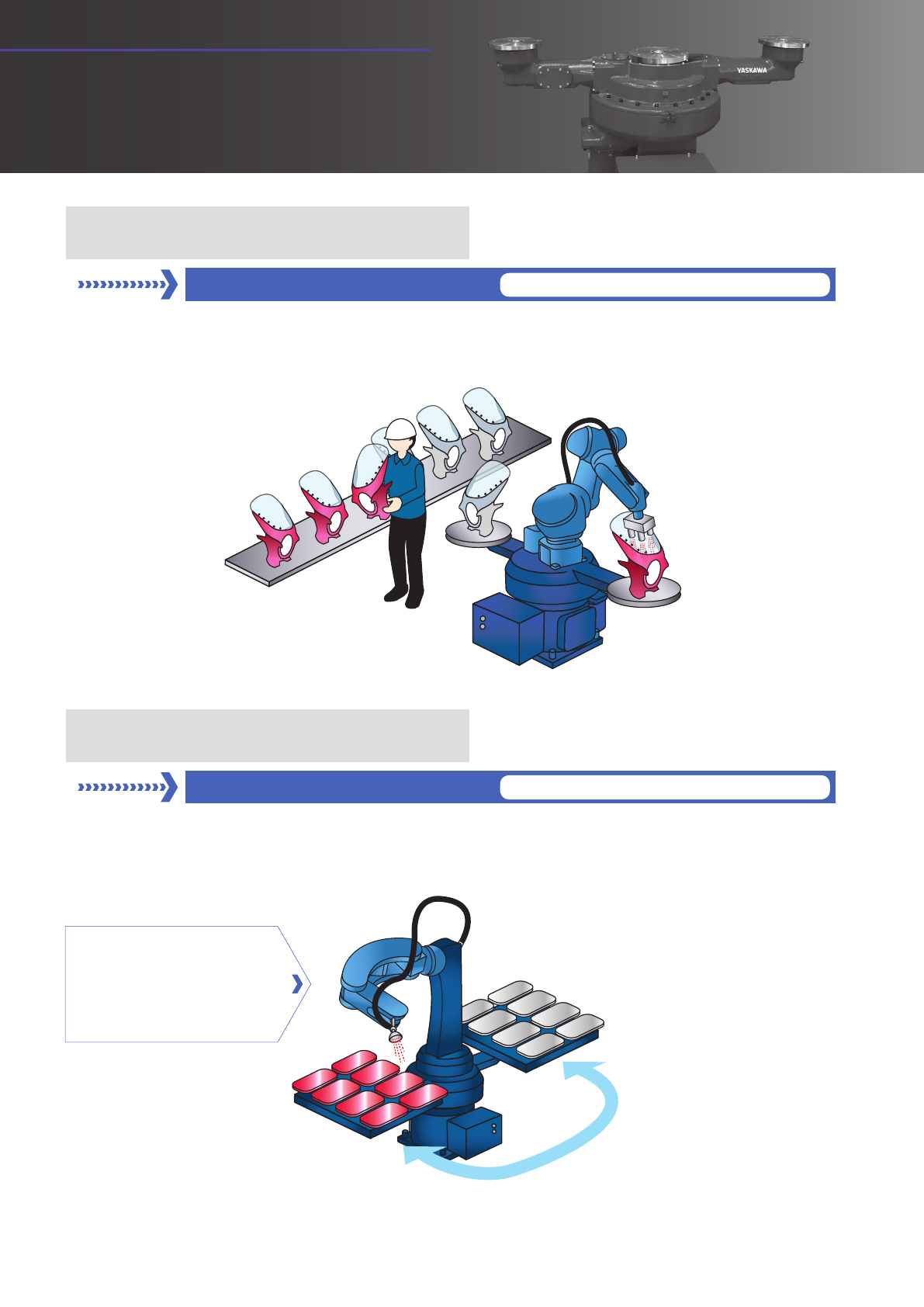
应用事例 MOTOFEEDER I I 机器人进行喷涂动作时, 通过人工替换工件节省了时间, 可实现更高效的生产。 由于动作领域更紧凑, 人工的替换作业更为容易, 以确保更高品质。 轻量的小型机器人壁挂式状态下,通过搭载工件提供装置 MOTOFEEDER Ⅱ,可最大限度地活用机器人的可动范围,实现广范围喷涂。 容易设置的喷涂模块系统 实现广范围的喷涂 减少浪费的时间和空间! 最大限度活用动作范围! 对应 MOTOFEEDER II + …
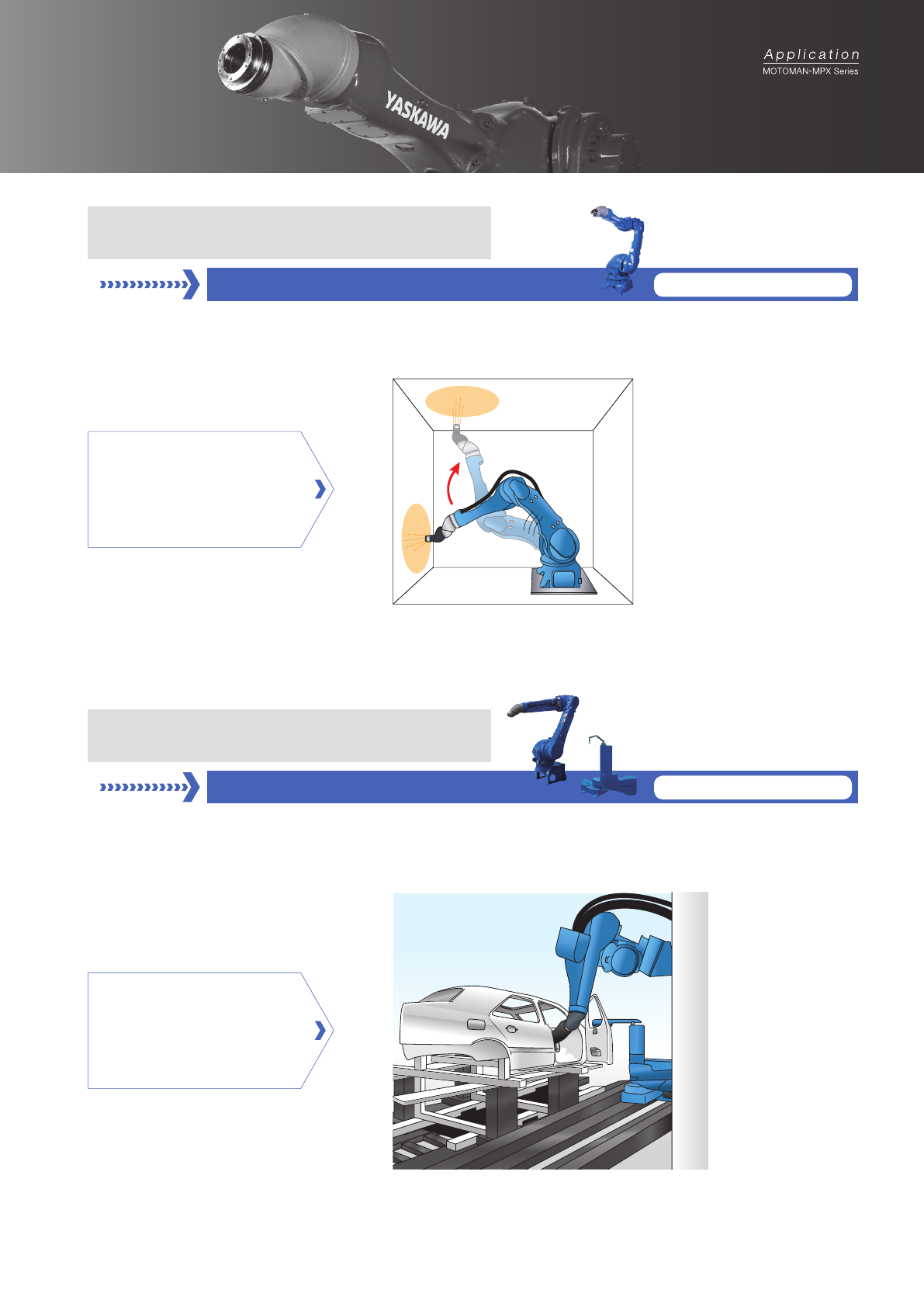
通过重新评估轴构成,不仅可以对接近机器人的工件进行喷涂,也可以逆肘姿势进行喷涂。
1
台机器人可喷涂范围更加扩展。
MPO10
打开车门
MPX3500
进行喷涂,由
2
台机器人协作实现顺滑的内板喷涂。机器人可左右对称设置,可简便地进行动作程序复制。
对各种形状、条件的工件的喷涂
汽车生产线上的喷涂
以自由的姿势实现高效的喷涂动作!
顺畅地进行汽车内板喷涂!
对应
MPX1950, MPX2600*
对应
MPX3500 + MPO10*
可对大工件及形状复杂的工件进行喷
涂。
在连续搬运的汽车生产线也可追踪不
同的传送带进行动作。
▼
MOTOMAN-MPX3500
▼
MOTOMAN-MPO10
▼
MOTOMAN-MPX2600
*:
对应机型的详细信息请咨询本公司营业部门。
5
应用事例
MOTOFEEDER II
机器人进行喷涂动作时,通过人工替换工件节省了时间,可实现更高效的生产。由于动作领域更紧凑,人工的替换作业更为容易,以确保更高品质。
轻量的小型机器人壁挂式状态下,通过搭载工件提供装置
MOTOFEEDER
Ⅱ,可最大限度地活用机器人的可动范围,实现广范围喷涂。
容易设置的喷涂模块系统
实现广范围的喷涂
减少浪费的时间和空间!
最大限度活用动作范围!
对应
MOTOFEEDERII + MPX1150, MPX1950*
对应
MOTOFEEDERII + MPX1150 (
壁挂架台
)*
以活用了安川丰富的技术知识的机器人技术对应各种系统。
通过在架台上搭载喷涂机等,可实现
更高品质的喷涂。
6
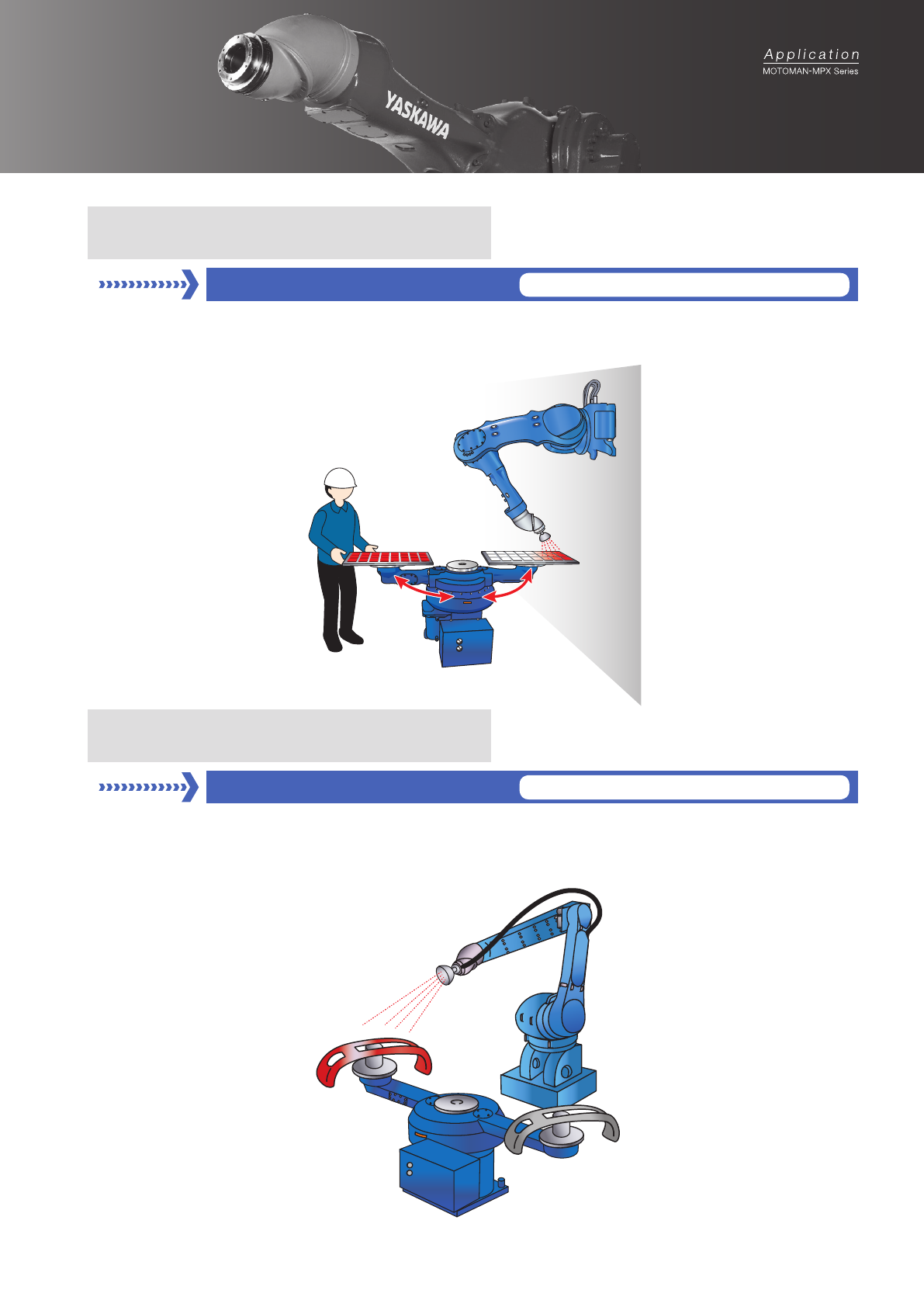
配合需要喷涂的工件进行选择
易于喷涂大型工件
得益于
MOTOFEEDER
Ⅱ的丰富的臂长种类,可选择
[
全喷涂机器人
]+[
自由设置方法
]
,以对应各种喷涂方式。
通过大型喷涂机器人的广动作范围和
MOTOFEEDER
Ⅱ的旋转台协作,可对工件的纤细部分进行喷涂。由于转台为机器人的外部轴(伺服控制),
可在任意角度停止,可进行协调控制。
自由组合
适用大工件
对应
MOTOFEEDERII+MPX2600 (
设置在壁挂式附近
)*
对应
MOTOFEEDERII+MPX3500 (
置地式
)*
*:
对应机型的详细信息请咨询本公司营业部门。
7