RL132维修手册.pdf - 第84页
RL132 维修手册 4.1 控制系统配置 DA9MCC-14-020-A0 4.1-9 保护功能 错误 代码编号 原因 处理 *电机自动识 别异常保护 95 电机和伺服放大器不匹配。 更换为与放大器相匹配的电机。 其他的异常 此时的 号码 可能有以 上的显示。 控制回路因噪音 ( 干扰 ) 过大而导致 了 误动作。驱动器的事故诊断功能启动 了,表示驱动器内部发生了某种异常 。 暂时切断电源,然后再重新接通。 即使这样,仍显示错误信息时…
RL132
维修手册
4.1 控制系统配置
DA9MCC-14-020-A0
4.1-8
保护功能
错误
代码编号
原因 处理
过速度保护
26
电机旋转速度超过了设定值。 不要给予过大的速度命令。
偏差计数器
溢出保护
29
偏差计数器的值超过了 227
(134217728)。
请与本公司服务部门联系。
软件极限保护
34
相对于位置指令输入范围而言,电机超
过了所设定的可动作范围。
1. 增益不合适。
1. 请与本公司服务部门联系。
*EEPROM
参数异常保护
36
当电源接通时,读取来自 EEPROM 的
数据时,参数保存区域的数据损坏了。
对所有的参数重新进行设定。
如果多次反复发生,可能是存在故障,请
更换驱动器。
请与本公司服务部门联系。
*EEPROM
检测代码
异常保护
37
当电源接通时,读取来自 EEPROM 的
数据时,EEPROM 写入确认数据损坏
了。
可能存在故障,请更换驱动器。
请与本公司服务部门联系。
紧急停止输入
异常保护
39
紧急停止输入 (EMG-STP : CN X5
2 引脚) 成为 OFF 时,被看作为有异
常而跳开。
请确认连接紧急停止输入的开关的电源和
电线是否存在异常。
请确认紧急停止输入 (CN X5 2 引脚) 应
处于 ON 状态。
请确认接通电源时,控制信号的电线
(DC12V ~ 24V) 的上升是否比伺服驱动器
的上升缓慢。
*编码器 Z 相
异常保护
48
检测出 2500 [p/r] 5 串行编码器的 Z 相
的脉冲短缺。
请更换电机。
*编码器 CS
信号异常保护
49
检测出 2500 [p/r] 5 串行编码器 CS 信
号的理论异常。
请更换电机。
原点复归
异常保护
68
在原点复归动作过程中发生了异常。被
输入了禁止异常驱动的输入信号。原点
复归动作所需要的参数没有设定,或设
置了无效值。
请确认连接禁止驱动输入 (CCWL,CWL :
CN X5 19, 20 引脚) 的开关、极限传感器
和电线、电源是否存在异常。
请确认与原点复归相关的参数设定。
未定义数据
异常保护
69
动作指令所命令的步动作、JOG 动作
所需要的参数没有设定,或设置了无效
值
请确认定位参数、步参数的设定。
请与本公司服务部门联系。
当前位置超限
异常保护
70
当 16.Pr51 (环绕许可) 为 0 的状态下,
当前位置 (-2147483647 ~
2147483647) 超出限度了。
不要给出使当前位置超出 -2147483647 ~
2147483647 的动作指令。
尤其对相对动作、JOG 动作和原点偏移量
动作要格外注意。
检测出禁止驱
动异常保护
71
在原点复归完成后的步动作和 JOG 动
作时,检测到了动作方向的禁止驱动的
输入。
与禁止驱动的输入 (CCWL,CWL : CN
X5 19, 20 引脚) 同处于开放状态。
请确认连接禁止驱动输入 (CCWL,CWL )
的开关、极限传感器和电线、电源是否存
在异常。
请确认动作指令和极限传感器的安装状
态。
请确认原点偏移量动作方向与禁止驱动输
入方向是否一致。
*最大移动量
限制异常保护
72
在原点复归完成后的步动作和 JOG 动
作中,电机的指令位置超出了最大移动
量的限制范围。
请不要给出使指令位置超出最大移动量限
制范围的动作指令。尤其对相对动作、JOG
动作和原点偏移量动作要格外注意。
RL132
维修手册
4.1 控制系统配置
DA9MCC-14-020-A0
4.1-9
保护功能
错误
代码编号
原因 处理
*电机自动识
别异常保护
95
电机和伺服放大器不匹配。 更换为与放大器相匹配的电机。
其他的异常
此时的
号码
可能有以
上的显示。
控制回路因噪音(干扰)过大而导致了
误动作。驱动器的事故诊断功能启动
了,表示驱动器内部发生了某种异常。
暂时切断电源,然后再重新接通。
即使这样,仍显示错误信息时,有可能发
生了故障。
停止使用,请更换电机、伺服放大器。
请与本公司服务部门联系。
=注意=
* : 带有∗标记的保护功能动作后,输入清除指令是不能解除报警的。要复位时,请暂时切断电源,排除
故障原因之后再接入电源。
RL132
维修手册
4.1 控制系统配置
DA9MCC-14-020-A0
4.1-10
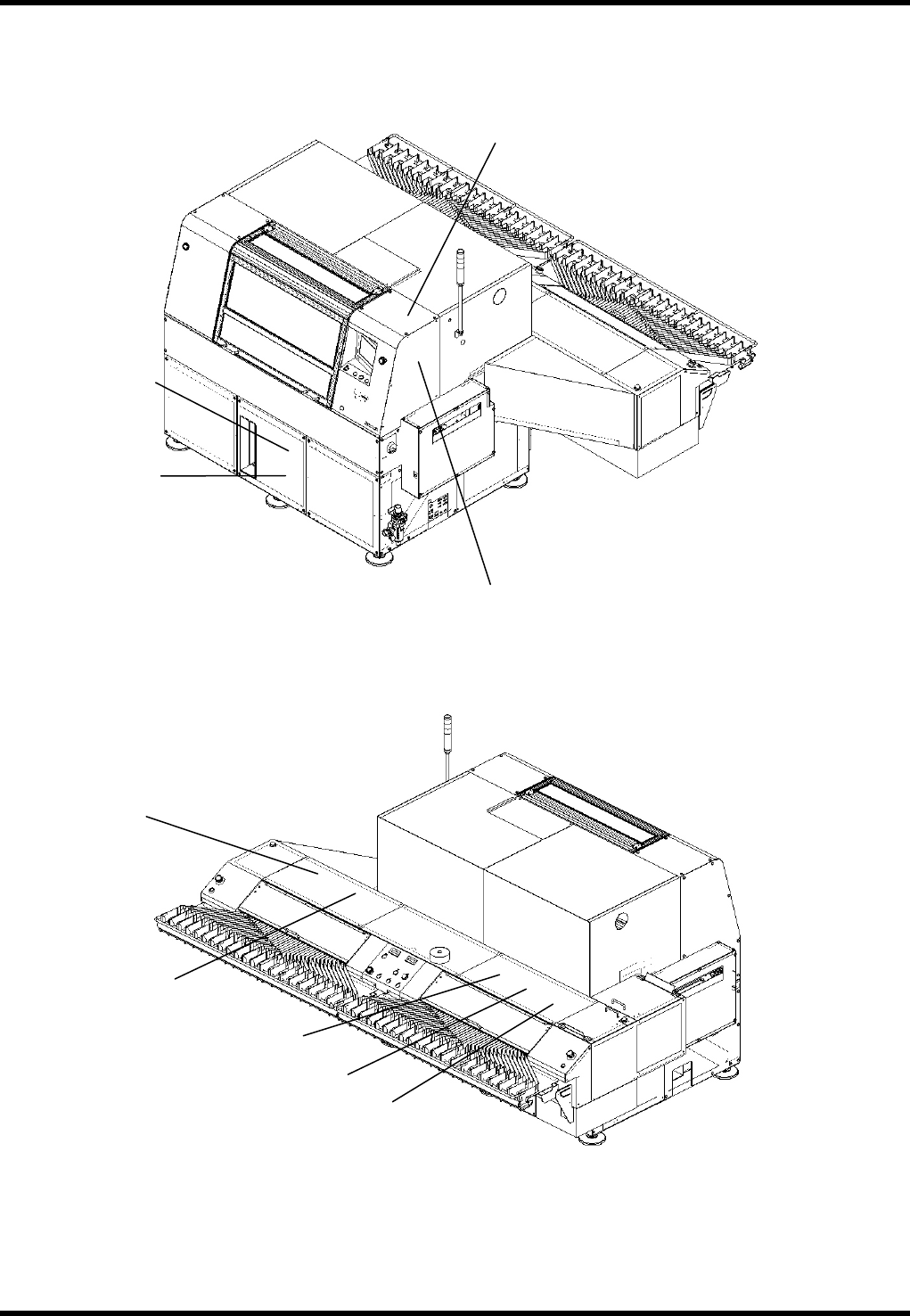
4.1.5 环状 I/O 负荷基板配置图
K311
K310
K333
K323
K326
K325
K324
K322
K327