KE-2050_MS参数.pdf - 第57页
Rev.2.00 MS 参数 4-24 4-4.3. 调整 HMS( 高度测定装置 : 选购品 ) 偏差 4-4-3-1. 功能 用 HMS 的 OCC 的组装位置,取得组装高度 。 4-4-3-2. 使用夹具 本设定不使用夹具 。 4-4-3-3. 操作 选择了 [ 偏差设定 (O )][ 贴装头偏差 (H )][HMS 偏差 (H )...] 之后,显示出下面的调整 HMS 偏差的设定画 面 。 < 操作 ・1/ 7 > 准备完毕,…
Rev.2.00
MS 参数
4-23
<操作・3/3>
设定完毕。
选择确认之后,返回初期值设定画面。
4-4-2-4.MSP 允许值
MS
P
值不良时 No
项目
MS
P
允许值
异常点
1 组装位置
X
±3mm 生产中的基板上的坏板标记读取
错误
坏板标记传感器的组装
精度
检查(更换)项目
Rev.2.00
MS 参数
4-24
4-4.3. 调整HMS(高度测定装置:选购品)偏差
4-4-3-1.功能
用HMS的 OCC 的组装位置,取得组装高度。
4-4-3-2.使用夹具
本设定不使用夹具。
4-4-3-3.操作
选择了[偏差设定(O
)][贴装头偏差(H)][HMS偏差(H)...]之后,显示出下面的调整HMS偏差的设定画
面。
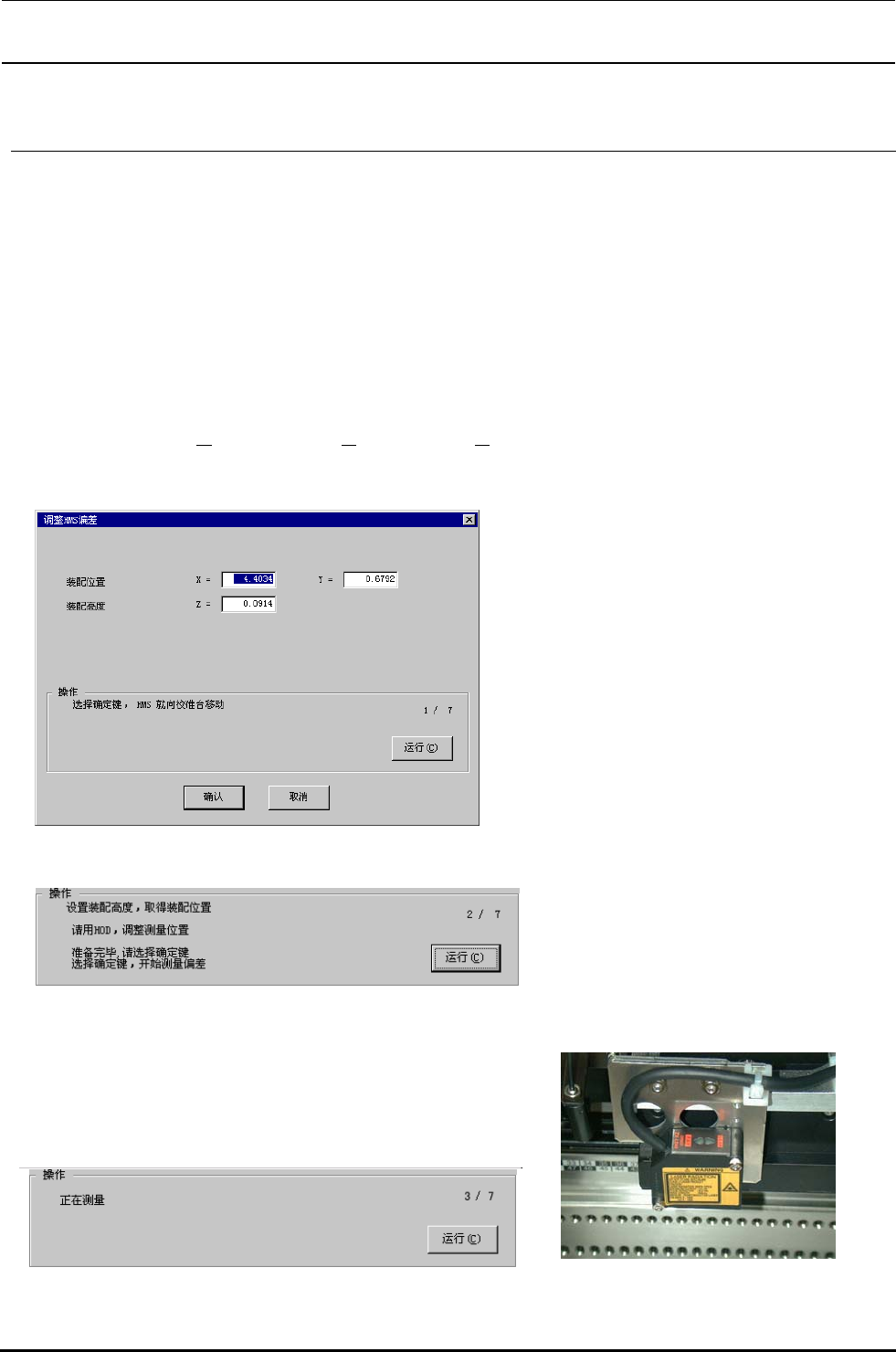
<操作・1/7>
准备完毕,请选择确认键。
选择了确认之后,HMS 移动到 CAL 块上。
<操作・2/7(组装高度)>
经演示,移动贴装头让传感器光照到 CAL
块平板部分,按 HOD 的确定键(通常不需
要演示)。
此时,请确认传感器为 ON(传感器头的 LED 两侧都亮灯)。
准备完毕,请选择确认。选择了确认之后,用 HMS 传感器测
定高度。
Rev.2.00
MS 参数
4-25
・测定内容
①计算新的用 HMS 取得的 CAL 块上面高度的组装高度。
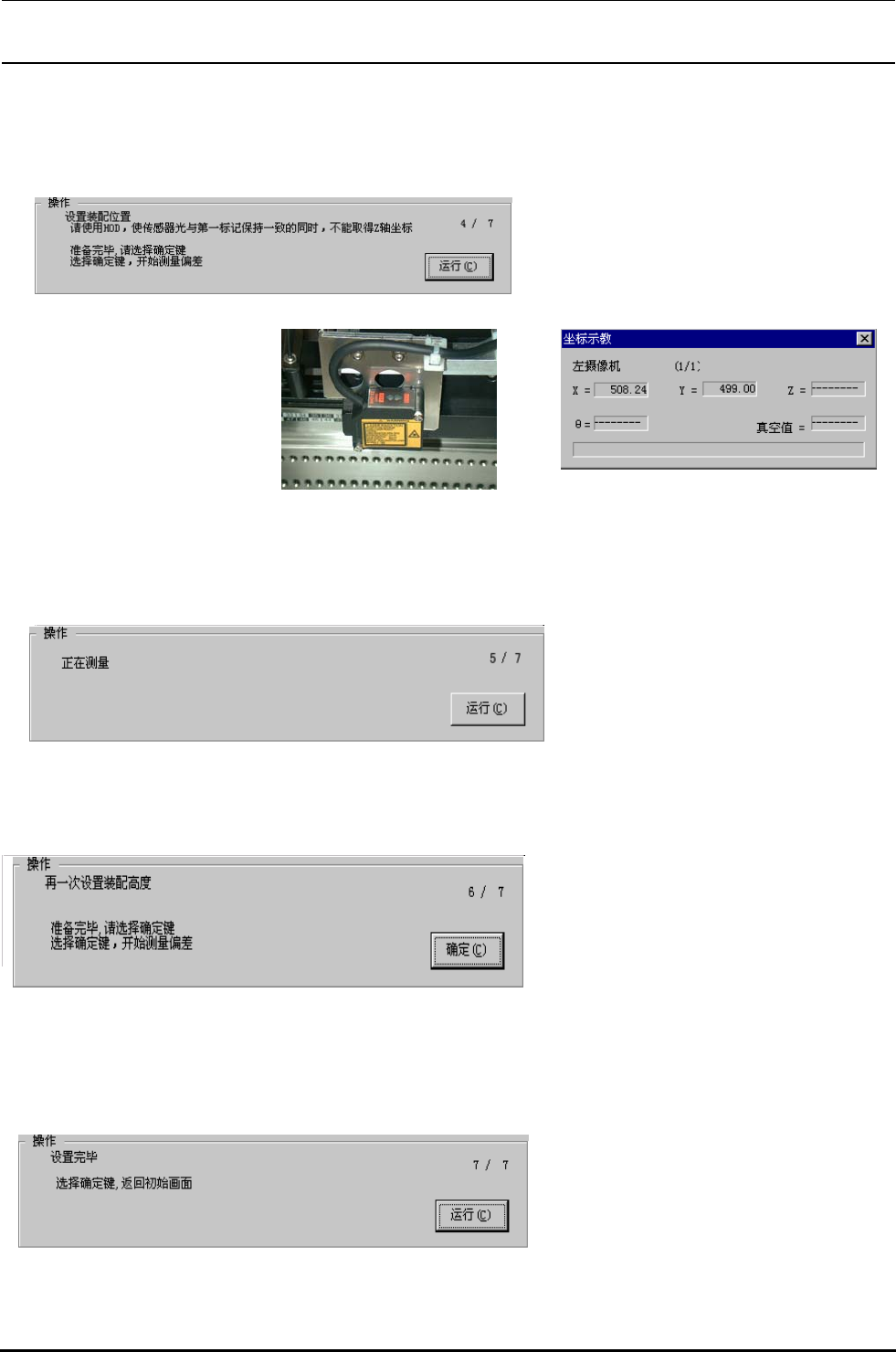
<操作・4/7(组装位置)>
经演示,移动贴装头,传感器光照到 CAL
块的第1标记,按 HOD 的确定键。
此时,确认传感器为 OFF(传
感器头的 LED 两侧都闪亮,
演示画面的 Z 坐标值不显
示)。
准备完毕,请选择确认。
选择了确认之后,HMS 传感器测定 CAL 块的第1标记
位置。
・测定内容
①用 HMS 取得的高度差测定 CAL 块的第1标记中心位置。
② 用①计算的第1标记中心位置和现有的 CAL 块第1标记的位置计算新的组装位置。
<操作・6/7>
测定重新组装高度。
选择了确认之后,用 HMS 传感器测定组
装高度。
・测定内容
①分别测定取得在
CAL 块上 9 处的高度。
②除了取得 9 处值种的上部 2 处和下部 2 处以外,把其他 5 处的平均值作为组装高度进行更新。
<操作・7/7>
设定完毕。
选择确认之后,返回初期设定画面。