00194567-01.pdf - 第50页
1 Sissejuhatus ja tehnilised andmed Kasutusjuhend SIPLACE F5/F5 HM 1.13 Ülevaade moodulitest - ladumispead Tarkvara versioon SR.407.xx 01/ 2001 EE väljaanne 50 1.13 Ülevaade moodulitest - ladumispead 1.13.1 12-segmendili…
Kasutusjuhend SIPLACE F5/F5 HM 1 Sissejuhatus ja tehnilised andmed
Tarkvara versioon SR.407.xx 01/2001 EE väljaanne 1.12 Ülevaade moodulitest - portaal
49
1.12.3 X-telje tehnilised andmed
1.12.4 Y-telje ehitus
Y-telg koosneb järgmistest põhiosadest: 1
– Y-telje kolmefaasiline vahelduvvoolumotor (F
5
HM), alalisvooluga töötav servomotor (F
5
);
– Y-telje hammasrihm;
– Y-telje juhikusüsteem;
– Y-telje mõõtesüsteem.
1
Kõiki Y-telgi käitatakse kolmefaasilise vahelduvvoolu servomootoriga. Kokkupõrget vältiva
vooluringi abil hoitakse ära portaalide omavaheline kokkupude. 1
1.12.5 Y-telje tehnilised andmed
Ajam kolmefaasiline vahelduvvoolumotor / hammasrihm (F
5
HM)
alalisvooluga töötav servomotor / hammasrihm (F
5
)
Max. kiirus 2,5 m/s
Liikumise ulatus 620 mm
Nihke mõõtesüsteem Metalljoonlaud
Skaala ulatus 646 mm
Lahutus 1,0 µm (F
5
HM)
2,5 µm (F
5
)
Ajam Kolmefaasiline vahelduvvoolumotor / hammasrihm (F
5
HM)
alalisvooluga töötav servomotor / hammasrihm (F
5
)
Max. kiirus 2,5 m/s
Portaalide käigu ulatus 910 mm
Nihke mõõtesüsteem Metalljoonlaud
Skaala ulatus 970 mm
Lahutus 1,0 µm (F
5
HM)
2,5 µm (F
5
)
1 Sissejuhatus ja tehnilised andmed Kasutusjuhend SIPLACE F5/F5 HM
1.13 Ülevaade moodulitest - ladumispead Tarkvara versioon SR.407.xx 01/2001 EE väljaanne
50
1.13 Ülevaade moodulitest - ladumispead
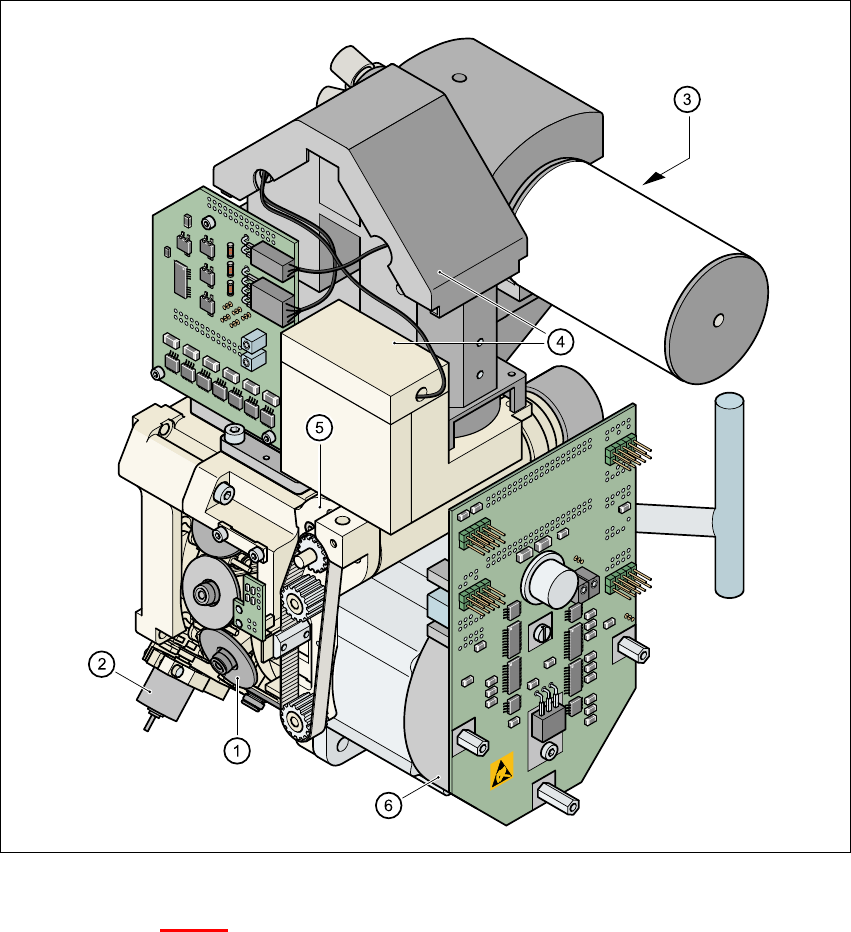
1.13.1 12-segmendilise Collect&Place tööpea ehitus
1
Joon. 1.13 - 1 12-segmendilise Collect&Place tööpea ehitus
Selgitused joon. 1.13 - 1 juurde 1
(1) 12 pinooliga täht (2) "Reject" klapi servoajami mootor
(3) Pöördmoodul (4) Komponentide tehisnägemismoodul
(5) Z-telje ajam (6) Tähe mootor
Kasutusjuhend SIPLACE F5/F5 HM 1 Sissejuhatus ja tehnilised andmed
Tarkvara versioon SR.407.xx 01/2001 EE väljaanne 1.13 Ülevaade moodulitest - ladumispead
51
Kõikide komponentide paigaldamine toimub samas tsüklis. Enne komponendi paigaldamist
mõõdetakse seda optoelektroonilise tehisnägemismooduli abil. 1
– Komponentide tehisnägemise kaamera loob käsitletavast komponendist kujutise.
– Määratakse komponendi täpne asukoht.
– Komponendi identifitseerimiseks võrreldakse paigaldatava komponendi korpuse kuju vastava
programmeeritud korpuse kujuga. Komponendid, mida ei õnnestu identifitseerida, lükatakse
seadme poolt tagasi.
– Pöördmoodul pöörab komponendi vajaliku paigaldusnurga alla.
1.13.2 12-segmendilise Collect&Place tööpea kirjeldus
– 12-segmendiline Collect&Place tööpea töötab põhimõttel "korja ja aseta", st komponendid
haaratakse imiotsaku abil (imiotsakus tekitatakse vaakum) ning asetatakse järgmises tsüklis
suruõhku kasutades ettevaatlikult ja täpselt trükiplaadile. Imiotsaku vaakumit (rõhku)
kontrollitakse nimetatud protsessi käigus mitu korda, millega kontrollitakse komponendi
korrektset haaramist ja trükiplaadile asetamist.
– Z-telje adaptiivne seiskamisrežiim kompenseerib trükiplaadi pinna võimalikud ebatasasused
komponentide paigaldamisel trükiplaadile.
– Defektsed komponendid lükatakse tagasi ning lastakse uuesti käiku parandustsükli ajal.
1.13.3 12-segmendilise Collect&Place tööpea tehnilised andmed
Komponentide tüübid 0402 kuni 18,7x 18,7 mm k.a BGA, µBGA, pöördkiibid,
TSOP, QFP PLCC, SO kuni SO32, DRAM
Max. kõrgus 6 mm
Väljaviikude min. samm 0,5 mm
Min. mõõdud 0,5 mm x 1,0 mm
Max. mõõdud 18,7 mm x 18,7 mm
Max. kaal 2 g
Z-telje max. liikumisulatus 16 mm
Programmeeritav paigaldusjõud 2,4 kuni 5,0 N
Imiotsakute tüübid 9xx (F
5
HM), 7xx (F
5
)
Nurktäpsus ± 0,525° / 3 σ, ± 0,70° / 4 σ, ± 1,05° / 6 σ
Paigaldamise täpsus ± 67,5 µm / 3 σ, ± 90 µm / 4 σ, ± 135 µm / 6 σ