OM-1647-001_w.pdf - 第31页
12 OM-1647 9. 马达 进行各单元的手动动作 ( 手动调节 ) 和当前系统信息的显示等。 Reference 有关双重搬送对应以外的说明请参照 “ SIGMA-G5第三卷第一章6.2马 达 ” 章节。 [1] 马达F12 [1] [ 搬送 A、B] 按钮 可以确认相应的各搬送通道的搬送单元。 界面展开 9.马达 1 105-001

11
OM-1647
8. 输入输出
确认有关搬送的输入输出状态。
Reference
有关双重搬送对应以外的说明请参照
“
SIGMA-G5第三卷第一章6.1输入
输出
”
章节。
[1]
输入输出F11
[1][ 搬送等 ( 搬送 )] 按钮
可以确认搬送的输入输出状态。
8.输入输出
1105-001
界面展开
12
OM-1647
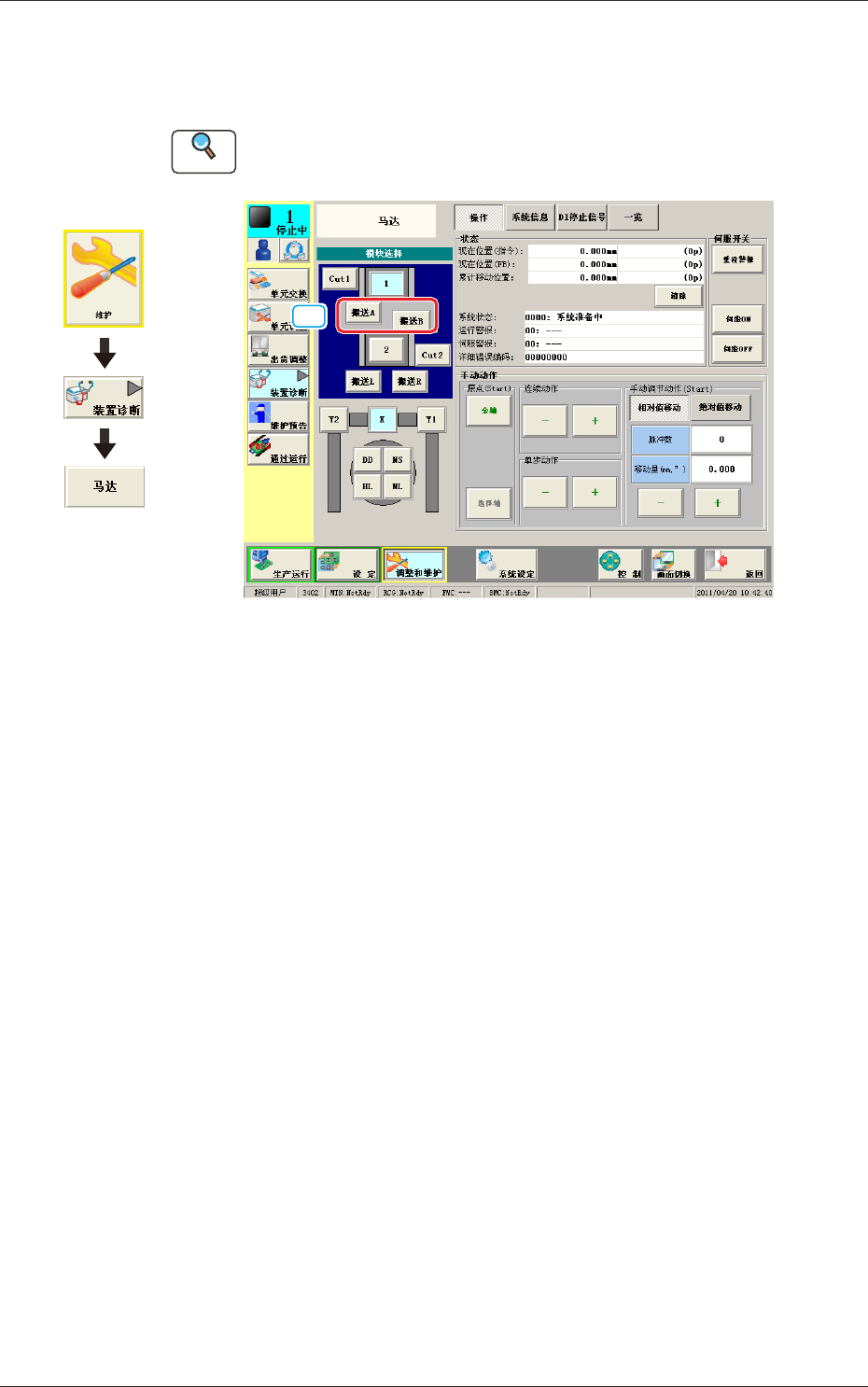
9. 马达
进行各单元的手动动作 ( 手动调节 ) 和当前系统信息的显示等。
Reference
有关双重搬送对应以外的说明请参照
“
SIGMA-G5第三卷第一章6.2马
达
”
章节。
[1]
马达F12
[1][ 搬送 A、B] 按钮
可以确认相应的各搬送通道的搬送单元。
界面展开
9.马达
1105-001
13
OM-1647
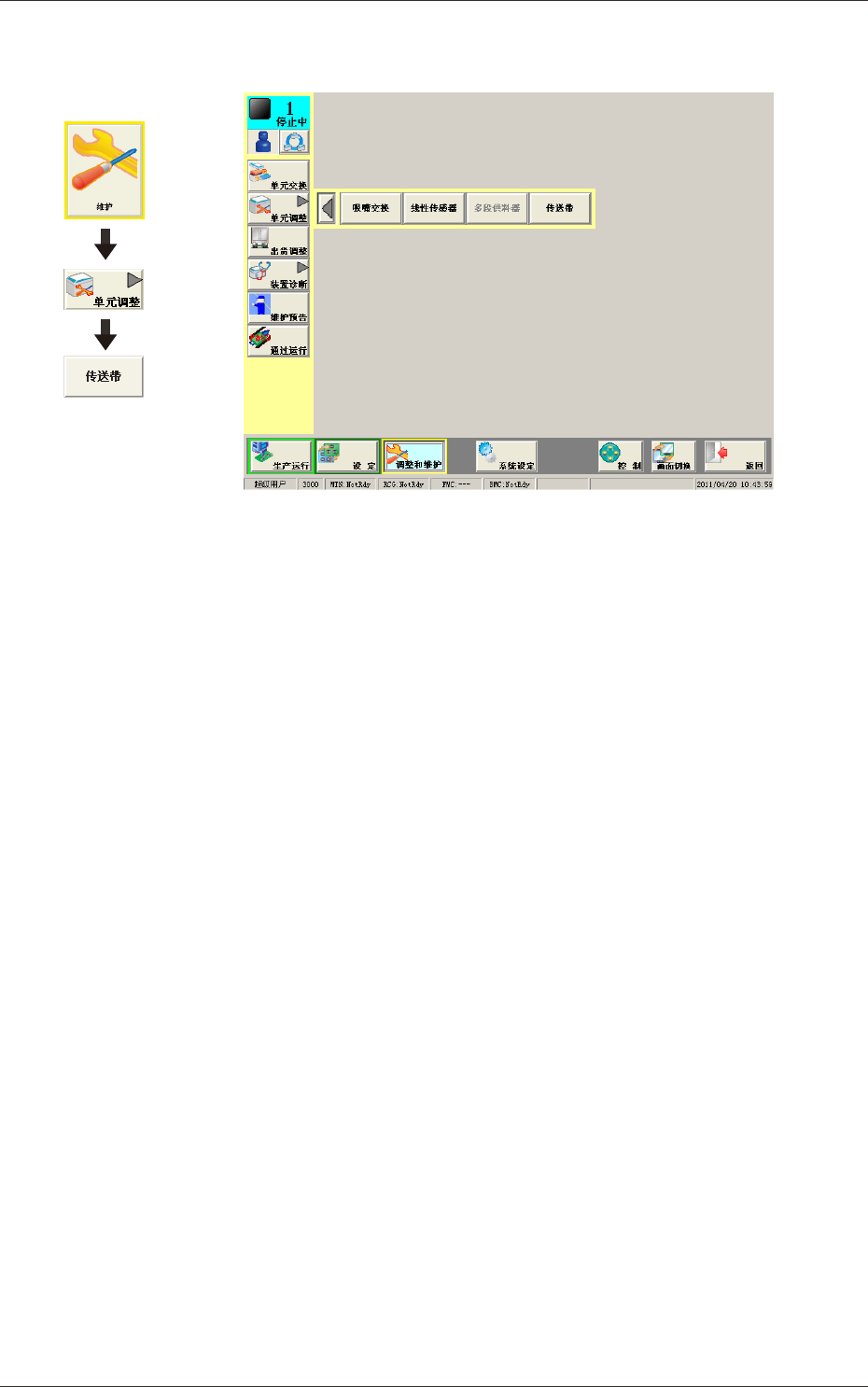
10.传送带
传送带F13
界面展开
10.传送带
1105-001