Administrator’s Guide-Chinese(SM320).pdf - 第166页
Samsung Component Placer SM320 Administrator ’ s Guide < 移到固 定相机 > 按钮 用视角 照相机排列 该部品时,只有在进行排列 的摄象机为固定照相机时 此 功能处于活性化状态。单击此 按钮时, <Teach> 领域的 <Device> 组合框 中选择的对象移动到 Fix Camera 位置。 < 元件校 正 > 按钮 进行对…

供应装置的设置
置Feeder的Slot的以后Slot中选择设置Tape Fe
大的顺序)
<示教> 领域
用于旋转XY轴驱动电动机把选定的对象移动指定的坐标位置或用于获取已选对
象的当前坐标。
8-5
按钮在当前选定的设
eder的Slot。(按Slot 序号
选择要移动到指定坐标位置的对象或用于选择所
Camera。
头1: 指定1号头。
头 2: 指定 2 号头。
头 3: 指定 3 号头。
头 4: 指定 4 号头。
5 号头。
头 6: 指定 6 号头。
光点: 指定光点。 (选项)
<移动> 按钮
组合框中选择的对象移动到指定的坐标位置。 运行
“移动”之前,先要用
鼠标单击需要移动的位置的坐标值对应的Grid的shell(Tape Feeder的吸附点
坐标)。
<得到> 按钮
以组合框中选择的对象为基准获取X, Y坐标。 运行 “得到”之前,先要用
鼠标单击需要移动的位置的坐标值对应的Grid的shell(Tape Feeder的吸附点
坐标)。
<拾取> 按钮
对当前 “Feeder Base”对话框中选择的Tape Feeder执行部件吸附。此时,应该预
先选择Device(要执行吸附的磁头) 成功地吸着后显示以下对话框。
组合框
用于旋转XY轴驱动电动机
要获取当前坐标的对象。可选择的对象如下。
Fid Cam:选择 Fiducial
头 5: 指定
Samsung Component Placer SM320 Administrator’s Guide
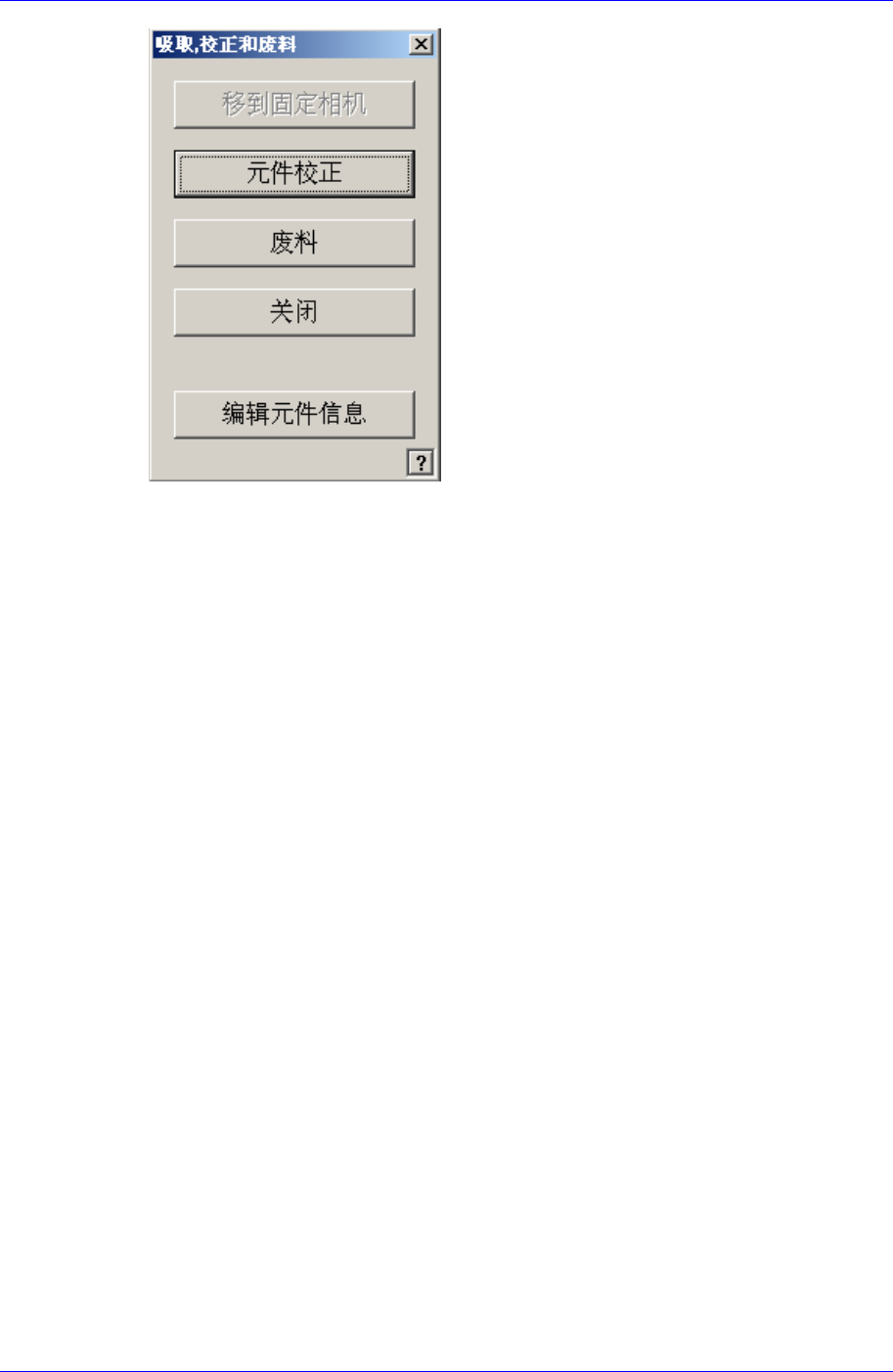
<移到固定相机> 按钮
用视角 照相机排列该部品时,只有在进行排列的摄象机为固定照相机时此
功能处于活性化状态。单击此按钮时,<Teach> 领域的 <Device> 组合框
中选择的对象移动到Fix Camera位置。
<元件校正> 按钮
进行对该部品的排列。
钮
元器件编辑对话框。
<两点示教…> 按钮
它执行 的吸着点时,通过示教装有部品的Pocket对角线两段的2
个点的方 点的功能。单击此按钮时显示以下对话框。
<废料> 按钮
把部品堆存到指定的废料盒。
<关闭> 按钮
关闭对话框。
<编辑元件信息> 按
显示该部品
示教带式喂料器
法来算出中心
8-6
供应装置的设置
8-7
图
8
教点> 领域
用
的位置。
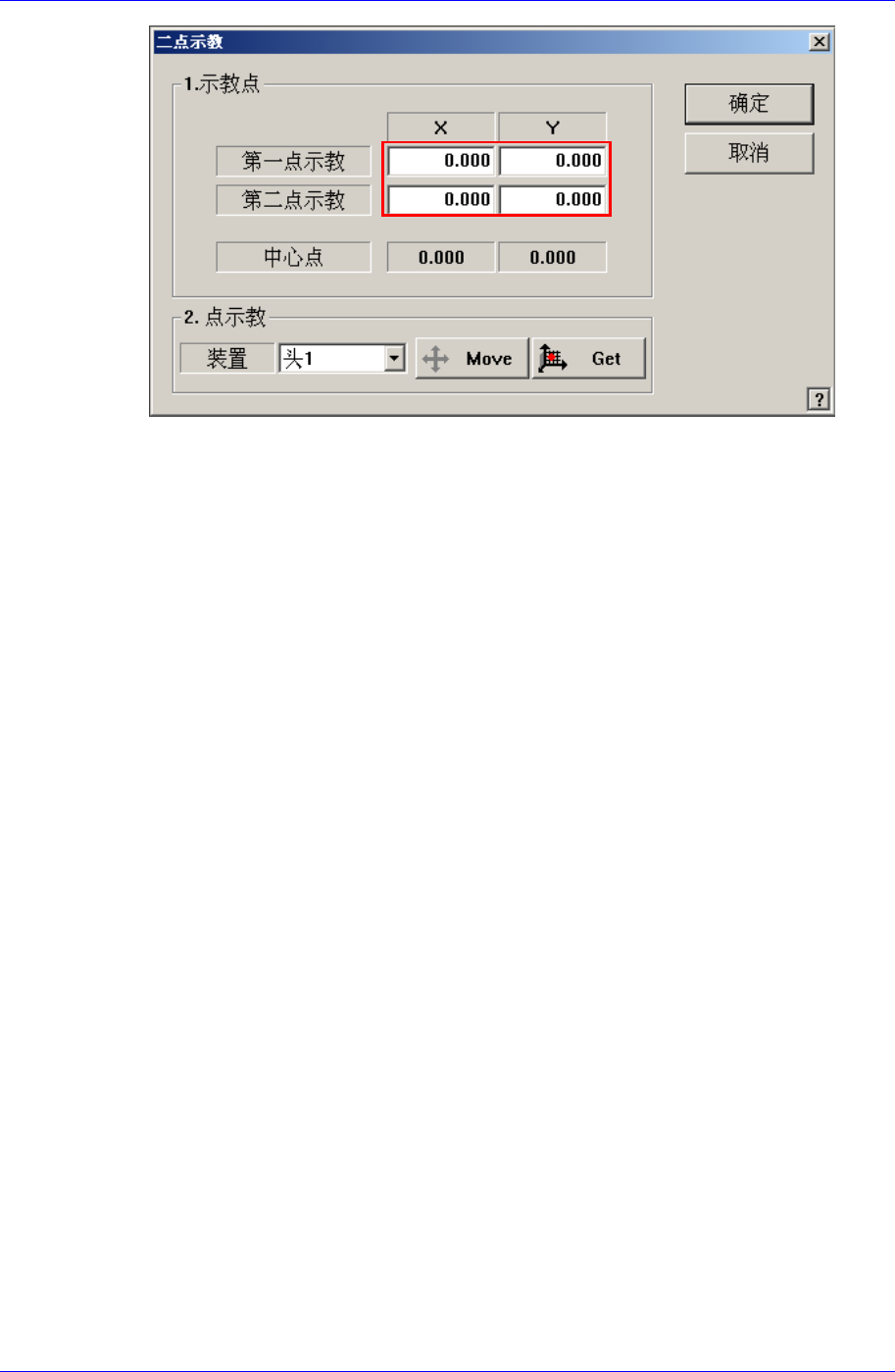
个点: 设定对角线两段的 2 个点当中第二个点的位置。
中心点: 显示利用对角线两段的 2 个点算出的中心点。
定 教时使用的Fiducial Camera照明。详细事项请参照 “7.1.1 共同
用于旋转XY轴驱动电动机选择要移动到指定坐标位置的对象或用于选
头 1: 指定 1
头 2: 指定 2 号头。
头 3: 指定 3 号头。
头 4: 指定 4 号头。
头 5: 指定 5 号头。
头 6: 指定 6 号头。
光点: 指定光点。 (选项)
<移动> 按钮
<Device>组合框中选择的对象移动到指定的坐标位置。此时,在点击 <
Move>按钮之前应该用鼠标点击相应所要位置的示教位置(示教点坐标
)
-4. “
喂料器
:
在喂料器基座示教
2
个点
”
对话框
<1. 示
设定 来计算中心点的对角线两段的 2 个点的位置。
示教第 1 个点: 设定对角线两段的 2 个点当中第一个点
示教第 2
<2. 点示教> 领域
用于旋转XY轴驱动电动机把选定的对象移动指定的坐标位置或用于获取已
选对象的当前坐标。
<Light> 组合框
设 示
Align Data (7-10
页
)” 。
<装置> 组合框
择所要获取当前坐标的对象。可选择的对象如下;
Fid Cam: 选择Fiducial Camera。
号头。