Administrator’s Guide-Chinese(SM320).pdf - 第267页
Machine Calibration 第 14 章 . Machine Calibration 14.1. Head [F2] 警 告 指定的管理人员以外,请勿任意 改变设备的设定状态。 指定的管理人员以外的用 户变更设备的设定状态,会 严重损 伤设备或受到伤害。 14.1.1. Head T AP 对话框 < 头 > 命令表示及设定 Head Asse mbly 的状态。 选择此按钮时显示如下 的对话框。 Grid 领域…
Machine Calibration
第14章. Machine Calibration
14.1. Head
[F2]
警 告
指定的管理人员以外,请勿任意改变设备的设定状态。
指定的管理人员以外的用户变更设备的设定状态,会严重损
伤设备或受到伤害。
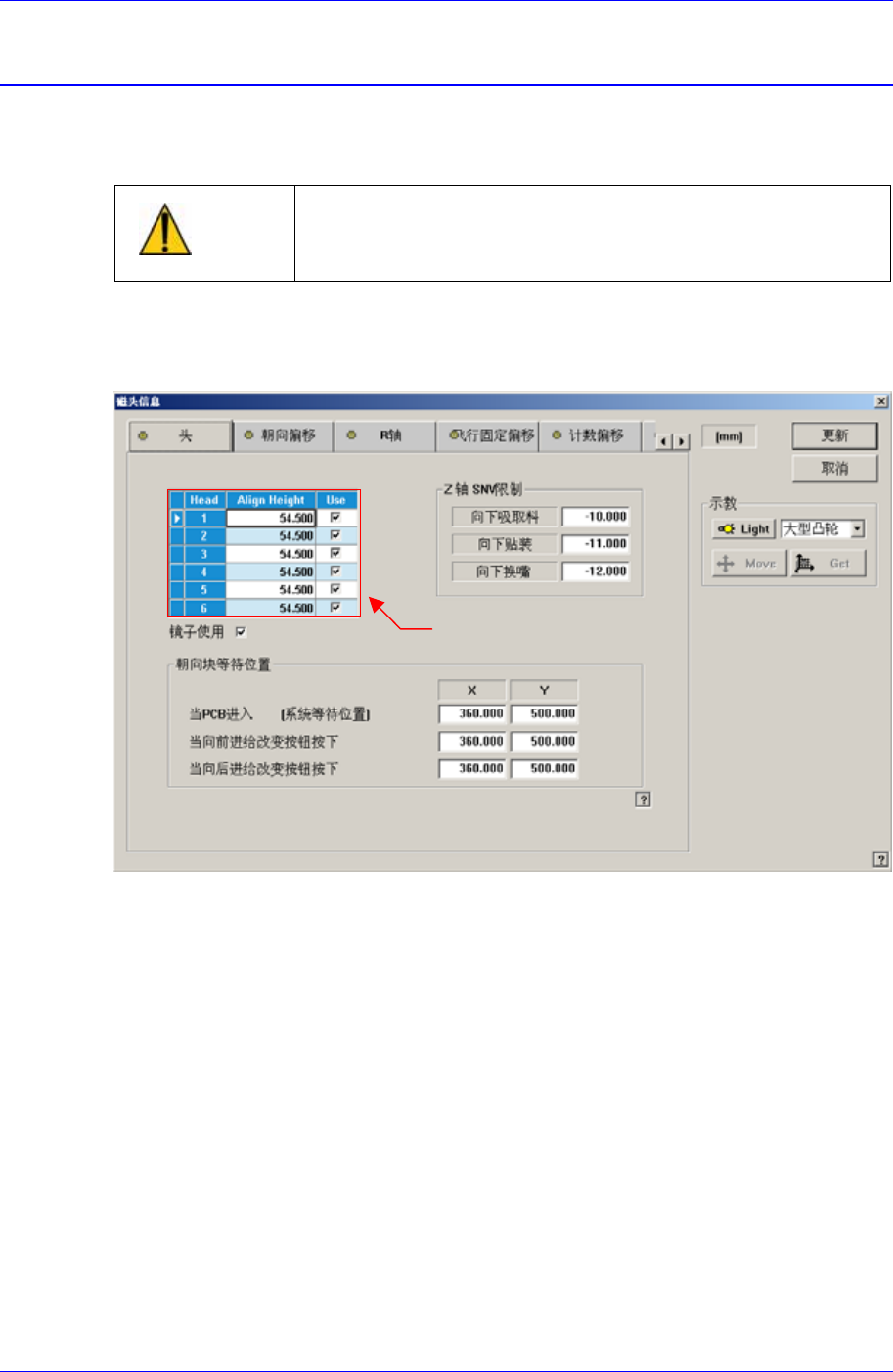
14.1.1. Head TAP对话框
<头>命令表示及设定Head Assembly的状态。 选择此按钮时显示如下的对话框。
Grid 领域
. “
系统设置
:
臂
/
头数据
”
对话框
图
14-1
设置 。
设置识别部件时的Z轴位置。
“54 于本设备的Default 元件对齐(Align)到PCB上面的
贴片头。如果发生与 Head 有关的错误,则可以在这里取
执行 Optimizer 程序。
<Grid> 领域
各磁头(Head)的部件识别高度
<Head No> 列
表示 Head 的编号。
<Align Height> 列
.5”表示通过适用 值把
位置。
<Use> 列
可以选择是否使用
消该对 Head 的选择而不使用该贴片头。但是为了重新指配分配给该贴片头
的作业,必须重新
14-1

Samsung Component Placer SM320 Administrator’s Guide
<Z
设定 向的移动高度的限度。此限定高度的基准位置是安装PCB的上表面
为了吸着部品 Z 轴下降时,设定下降高度的限度。
(Pickup)元件时限制元件的拾取位置不得超出-10 以
gram Download 时通过错误提示显示在
品 Z 轴下降时,设定下降高度的限度。
cement)时可以设置的最小值, Default 值为“-11”。
<
为 限度。
<He
设定 置。 要修改当前设定的位置,请重新示教该位置
。
sembly 的等待位置。
,载入 PCB 时,将使贴片头移动到在这里设置
Wait Type 设为 PCB 时 PCB 上有 Fiducial Mark,
;没有 Fiducial Mark 时,贴片头就在最
元件的装置(Feeder)的 Pickup 位置上等待。
,
的等待位置。
设定按下 备背面的运转面板的 “Rear feeder change”按钮时,
Head Assembly 的等待位置。
领域
于回转XY, Z轴驱动电动机把选择的对象移动到指定的坐标位置,或用
获取已选对象的当前坐标位置。
择Fid Cam: Fiducial Camera。
1: 指定 1 号头。
头。
轴极限> 领域
Z轴方
。
<向下吸取料> 编辑框
“-10”值是为了在拾取
下而设置的 Software Limit。如果输入了无效值,本设备将检查所设置的
Limit 值,并且在进行动作或 Pro
屏幕上。
<向下贴装> 编辑框
为了贴装部
贴装(Pla
向下换嘴> 编辑框
了在 ANC 交换吸嘴 Z 轴下降时,设定下降高度的
ad Block Wait Position> 领域
Head Assembly的等待位
<PCB 进入> 编辑框
设定安装 PCB 时 head as
如果 Wait Type 设为 System
的坐标位置后等待。
如果 Auto,当载入
贴片头就在 Fiducial Mark 位置等待
先供应贴装(Placed)
<当前面换料按钮按下> 编辑框
设定按下设备正面的运转面板的 “Front feeder change”按钮时
Head Assembly
<当后面换料按钮按下> 编辑框
设
<Teach>
<Device> 组合框
用
于
选
头
头 2: 指定 2 号头。
头 3: 指定 3 号
头 4: 指定 4 号头。
14-2