AQ-2 spec book LR.pdf - 第11页
General Specifica tions 9 of 44 2.5 C omponent v ision F igure 5 T he Component vision (CV) system is used f or the alignment of components on leads , edges or bumps. C omponent Alignment is achieved by moving the placem…
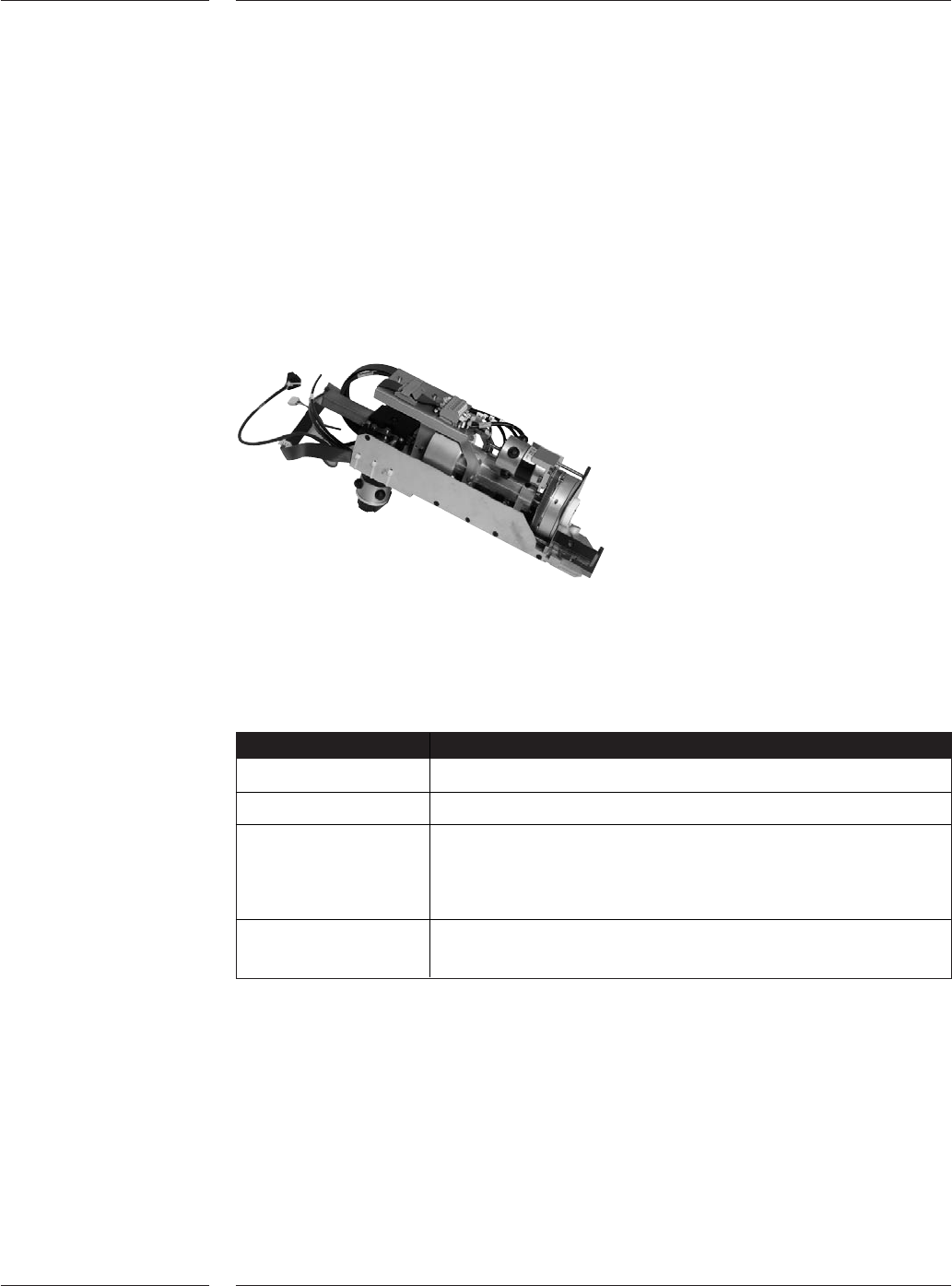
2.4 Placement
head
Both placement heads are equipped with Z-height, phi-rotation and real time force
control. It can pick, rotate and place any component within the work area of the AQ-2.
Component pick-up and detection is done using a vacuum nozzle or a gripper.
Component presence as well as the relative position will be checked by the component
vision system. When placing through-hole components the AQ-2 can detect bent leads
using “variable through hole check”. If leads are bent the placement head will measure a
resistance force when a lead touches the PCB. If the force exceeds the programmable
limit (between 4 and 14 N) the AQ-2 will reject the component. Nozzles and grippers can
be automatically exchanged with the toolbit exchange unit configured on the machine
base between feeder interface and workarea.
Placement head
General Specifications
8 of 44
Figure 4
Maximum stroke 77mm
Phi resolution 0.0072 degree
Placement force Inner nozzles: 1.5N ± 0.3N (Fixed)
Outer nozzles: 4-40N (programmable in 0.1N increments)
Flip chip nozzles: 0.9-3.5N (programmable in 0.1N increments)
Variable through hole Programmable between 4 and 14 N
check
Placement head
Table 3
General Specifications
9 of 44
2.5 Component
vision
Figure 5
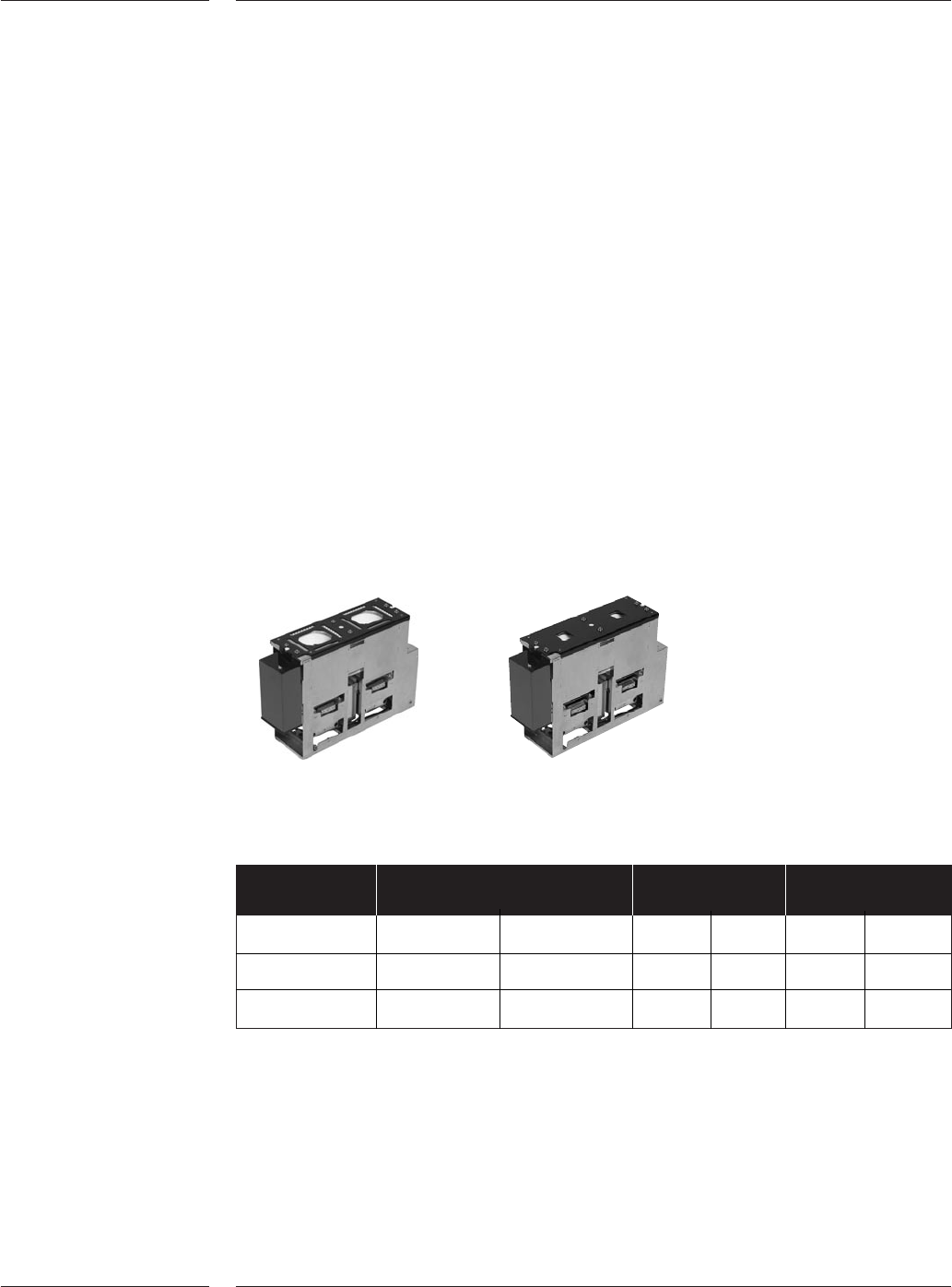
The Component vision (CV) system is used for the alignment of components on leads,
edges or bumps. Component Alignment is achieved by moving the placement head
above the lens of an upward-facing CV camera. A combination of multiple light sources
ensure sufficient contrast between the component (leads) and the background. Utilizing
these light sources (back light, dark field, mid field and bright field illumination) the
AQ-2 is capable of aligning almost any component. The illumination intensity is
automatically chosen based upon the reflectivity of the respective components. The CV
camera can determine the position of the component with respect to a reference plate.
The deviations, together with the fiducial alignment values, will be used to determine
the correct placement position.
There are two different component vision systems available for the AQ-2.
• The Component vision Large Field of View (LFOV) is used to align and inspect a wide
range of components up to 45 x45 mm or 66 x 23 mm with bump or lead width down
to 150 micron. It is also possible to inspect larger components but this can be done with
the component slightly above the focal plane of the camera allowing to inspect
components up to 165 x 45mm.
• The Component vision Small Field of View (CV SFOV) is used for ultra fine pitch
components like CSPs and flip chips. By use of a smaller field of view (22x22mm) a
higher accuracy can be achieved which is required for this type of components.
Components with bumps down to 80 micron with a 160 micron pitch can be measured.
Component vision modules
X-axis Y-axis Width Pitch Width Pitch
CV LFOV (mm) 45 45 0.150 0.300 0.150 0.300
CV SFOV (mm) 22 22 0.080 0.160 0.080 0.160
Component
vision Maximum component size Lead Bump
Table 4
Note: Component and lead dimensions above or below the noted specification require
an application review.
Note: Components larger than the noted field of view can be processed. For instance, the
CV LFOV can measure a 165mm long connector, however some restrictions may apply.
Also components of 66x23mm (or 23x66mm) can be measured in one view.
General Specifications
10 of 44
2.6 Board
alignment
Table 5
Figure 6
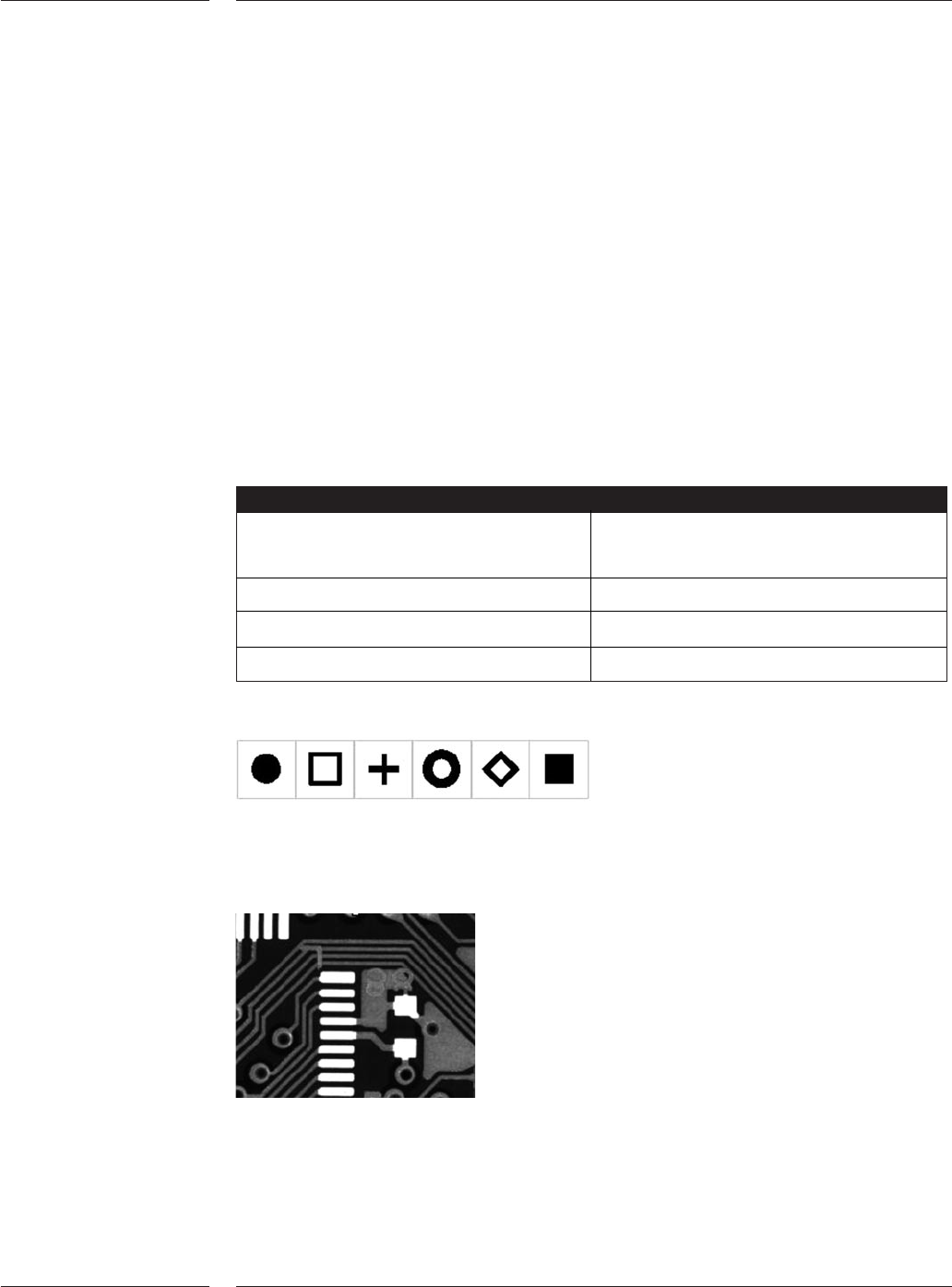
The digital Board Alignment (BA) camera (mounted on the H-Drive manipulator) is used
to improve the placement accuracy of the component with respect to the board by
measuring the global and/or local board fiducials or specific artwork features.
For PCBs that have no fiducials at all, the AQ-2 can make use of artwork recognition. The
board alignment camera can measure a specific part of the artwork of the PCB and
calculate the centre of that specific part of the PCB. For example, solder pads of a IC or
BGA can be used in this case.
Potential deviations (translation, rotation) are calculated with the data of the servo-
systems of the manipulator. The Board alignment system can also be used for bad mark
sensing. Board alignment is achieved by projecting light on the PCB and measuring the
intensity of the reflection with the use of a downward-facing camera.The dark surface of
the PCB only reflects a small amount of light. Traces of white copper or solder (lead)
reflect the light strongly. This contrast makes it possible to determine the position of the
substrate (fiducial or artwork marks). At least two points are required on the board to
determine its position. To achieve the highest accuracy, board stretch must be measured
and this requires at least three fiducials. Any fiducials or artwork, with sufficient
contrast, can be used.
Board alignment
Fiducial size (min.) 0.1mm
(max.) 4.0mm
Tolerance 20% of nominal
Clearance 2 x diameter of fiducial
Minimum contrast level 30%
Samples of fiducial markers
Sample of artwork
Figure 7