AQ-2 spec book LR.pdf - 第8页
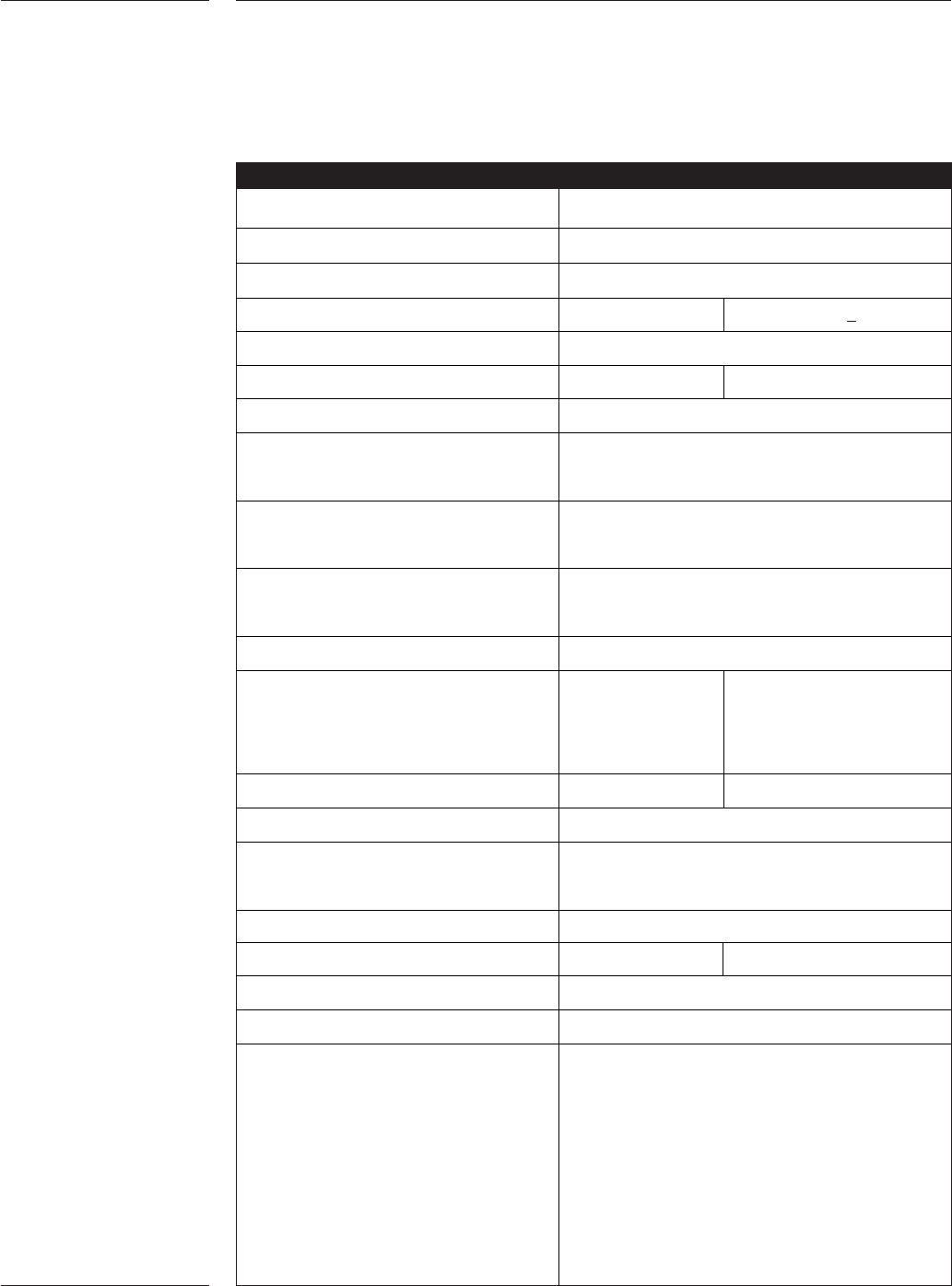
2.0 General Specifica tions 2. 1 AQ- 2 Specifica tions T able 1 General Specifica tions 6 of 44 AQ-2 Main Specifications Max output [CpH] 5300 Max output for odds [CpH] 3350 Max output for ultra fine pitch [ CpH] 3530 Hi…

Component vision
•Two upward looking digital cameras inspect components
•Components are measured at placement height for optimal feature recognition
• One camera unit covers the complete SMT component range
• Camera unit provides bump recognition down to 80 micron
• Variable red and blue lighting levels are combined for ideal feature recognition
H-Drive gantry system
• Provides the ideal combination of placement accuracy and process versatility
• Employs independent linear motors developed for the semiconductor industry
• Provides 25 micron @ 4 sigma placement accuracy
• Motor design eliminates drag, pull, and dog-tail effects
• Each of the three axes uses one-micron linear scale encoders
Placement heads
• Support nozzles and grippers
• Perform component pick detection and correction
• Automate pick height calibration
• Z-axis handles parts up to 50mm tall
• Placement force using closed loop feedback is programmable from 0.9 to 40N
Feeder platform
• Feeder trolley allows 47 pick positions in 24 8mm slots
• Tray trolley handles over 96 unique Jedec tray-fed components or 188 other tray
components
• Feeder bank provides an interface for SMT and oddform feeders
Transport unit
• Three types of transport are available to support very thick boards, regular PCBs, and
ultra-thin flexfoils
• Uses edge clamping or vacuum support
• Features automatic board width and thickness adjustment
• Boards are individually edge belt driven
Graphical User Interface
• Touchscreen interface with intuitive icons
• On-line component editor
• Optional multiple language support
Open architecture
• Allows cost-effective purchase of options for the current application
• Supports addition of modules in the field for new applications
• Each module uses fiducials to ensure quick installation and calibration in minutes
1.1 Features
Introducing the AQ-2
5 of 44
2.0 General
Specifications
2.1 AQ-2
Specifications
Table 1
General Specifications
6 of 44
AQ-2 Main Specifications
Max output [CpH] 5300
Max output for odds [CpH] 3350
Max output for ultra fine pitch [CpH] 3530
Highest Accuracy class 25µm @ |µ|+4 (Cpk>1.33)
Pick performance 99,9 %
Technical Uptime > 99.5% (excl. feeder assists)
Lifetime: Nozzle > 2 Mio placements
Component range 0.4x0.2mm (01005) to 45x45mm or 66x23mm
For odds up to 165 x45mm
Feeding options Feeder trolley: 47 pick positions
Tray trolley: 96 JEDEC trays
Feeding types Tape, stick, tray, wafflepack, stack tube, GPAX,
radial etc .
Placement force 0.9N to 40N, lower forces with restrictions
PCB range min ( L x W ) 50x50mm L=PCB transport direction
50x20mm
optional
PCB range max ( L x W ) 508x460mm L=PCB transport direction
PCB transport direction Left to Right or Right to Left.
Power supply 190-480V 3-phase
47-63Hz, 5 kVA
Air supply >6bar, 190 Nl/min
Dimensions (incl. trolleys) 1560x2380m(LxW) Total 3.71 m
2
Weight (excl. trolleys) <1750kg
Noise <72 dB(A) @ 1m distance
Applicable standards: 98/37/EC CE Machine directive
89/336/EEC CE EMC directive
73/23/EEC CE Low voltage directive
SEMI S2 Safety standard
SEMI S8 Ergonomics standard
SEMI E95 Human Interfaces standard
IPC 9850 Accuracy & speed testing standard
General Specifications
7 of 44
2.2 Machine base
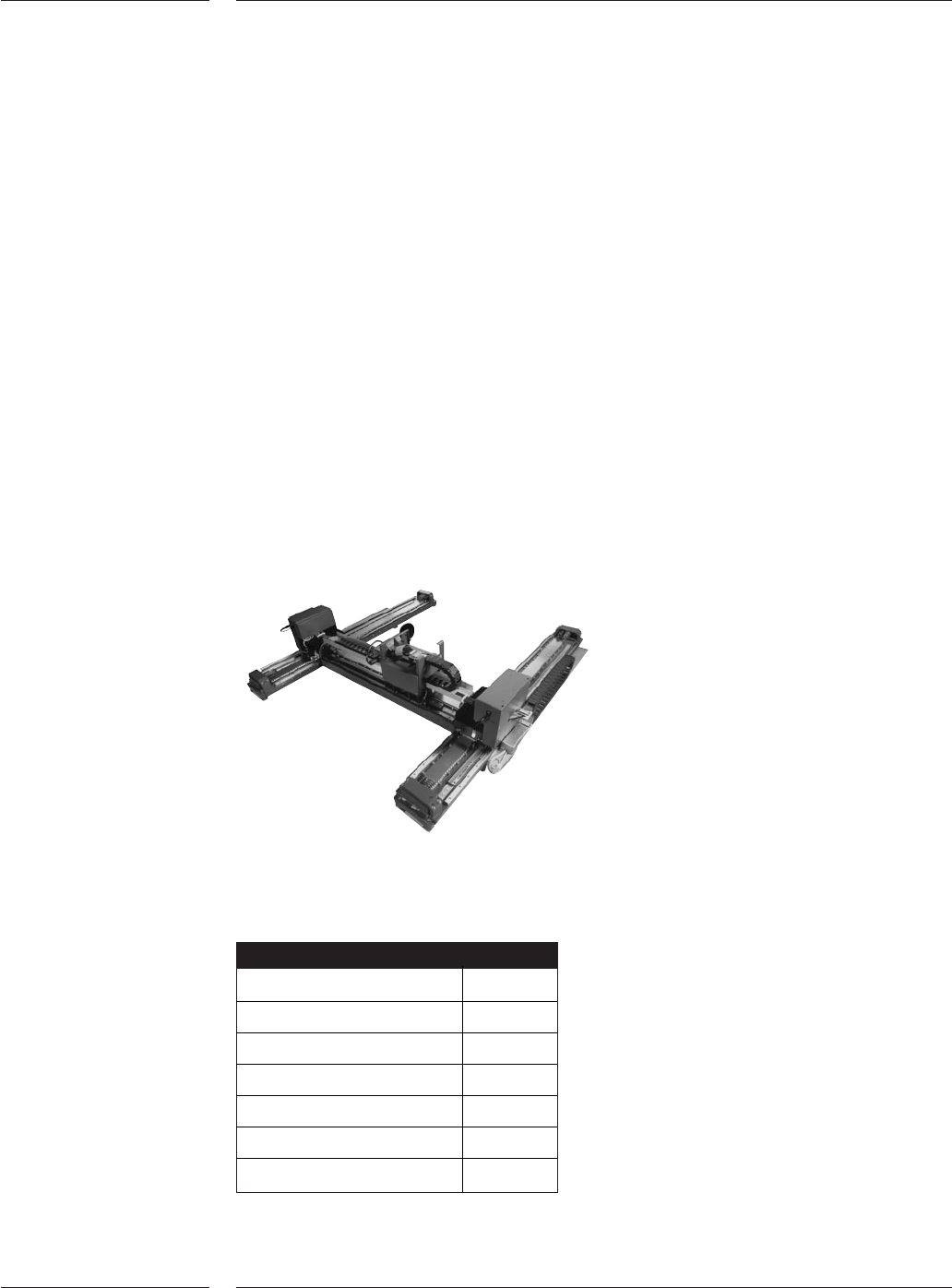
2.3 H-Drive
manipulator
Figure 3
The machine base is an H-shaped frame constructed out of welded standard rectangular
steel plates. It consists of a set of two vertical box structures, connected by a horizontal
square box structure. The frame is rigid and stable to minimize vibration transfer from
the factory-floor to the machine. Adjustment of the frame to the floor can be done
during or after installation. The transport height level complies to both SMEMA and
Japanese standards.
The machine base contains all mechanical interface surfaces for connection of the robot,
feeders trolleys/banks and PCB transport. It also holds the control and supply systems as
well as the safety covers and doors to provide safe working conditions for the operator.
The H-Drive manipulator is a self-calibrating Cartesian robot with linear motors and
encoders. The manipulator has two Y-axes and one X-axis, each with their own
integrated controller and power stages. Special attention is given to the dynamic
behaviour of the manipulator which is of great importance for the performance. Settling
times are defined as the period between the end of the setpoint profile and the moment
that the manipulator actually reaches the required position. If the position window is
chosen smaller (e.g. for fine pitch components, requiring higher accuracy) the settling
time will be longer. For the H-Drive manipulator, a cubic setpoint profile will be used. In
a cubic setpoint profile the acceleration gradually increases and decreases as function of
time. The X-slide of the manipulator has, on the front side, an interface which is
configured with 2 placement heads and 1 digital fiducial camera.
H-Drive manipulator
H-Drive manipulator
Resolution X and Y motor 1 micron
Acceleration X motor 17 m/s
2
Acceleration Y motors 12 m/s
2
Velocity X motor 1.4 m/s
Velocity Y motors 1.4 m/s
Max. stroke X motor 660mm
Max. stroke Y motors 1140mm
Table 2