00193937-02.pdf - 第101页
사용자 매뉴얼 SIPLACE HF 시리즈 3 기술 자료 소프트웨어 버전 SR.505.xx 2004 년 7 월 미국판 3.7 실장 헤드 101 (1) 진 공 발 생 기 (2) 회전 스테이션 , DP 축 (3) 슬 리 브 12 개가 있는 스 타 , 스 타 축 (4) 압 착 공기 밸브 (5) 소 음 기 3 그림 3.7 - 4 12 세그먼트 Collect&Place 헤드 ? 기능 그룹 , 2…
3 기술 자료 사용자 매뉴얼 SIPLACE HF 시리즈
3.7 실장 헤드 소프트웨어 버전 SR.505.xx 2004 년 7 월 미국판
100
SIPLACE HF 나 HF/3 실장 시스템을 주문할 때 자신의 필요에 맞는 이상적인 헤드 구성을 선택
할 수 있습니다 . 실장기는 각자의 주문에 맞게 구성 및 공급됩니다.
실장 헤드를 현지 조건에 맞게 변경하기를 원하면 그에 맞는 재구성 키트도 있습니다 . 이 패키지
에는 실장 헤드 외에도 필수 결합 부품과 케이블 등이 포함됩니다.
실장 헤드를 변경하기 전에 먼저 스테이션과 SIPLACE Pro 소프트웨어를 개조해야 합니다. 그
런 다음 시스템을 다시 보정해야 합니다.
헤드 모듈성 , 즉 실장 헤드를 변경함으로써 실장기를 생산 요구 조건에 맞게 개조하는 것은 향후
장비에 투자를 할 필요 없이 실장기를 생산 필요성에 쉽게 맞출 수 있다는 장점이 있습니다.
3.7.2 고속 실장용 12 세그먼트 Collect&Place 헤드
3
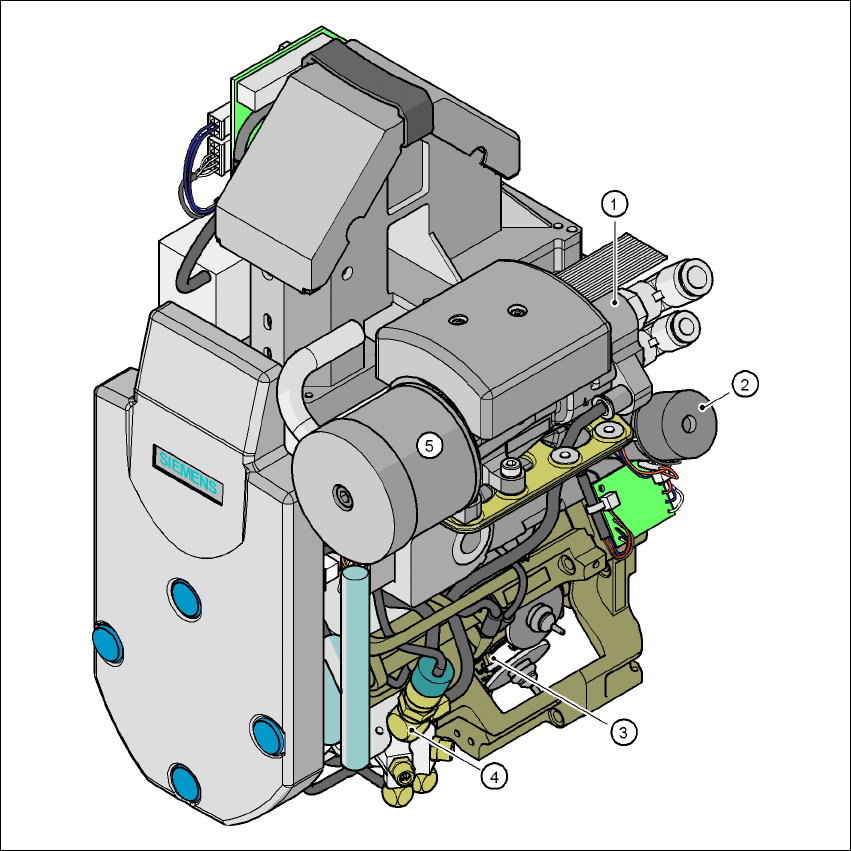
그림 3.7 - 3 12 세그먼트 Collect&Place 헤드 ? 기능 그룹 , 1 부
3
사용자 매뉴얼 SIPLACE HF 시리즈 3 기술 자료
소프트웨어 버전 SR.505.xx 2004 년 7 월 미국판 3.7 실장 헤드
101
(1)진공 발생기
(2)회전 스테이션 , DP 축
(3)슬리브 12 개가 있는 스타 , 스타 축
(4)압착 공기 밸브
(5)소음기
3
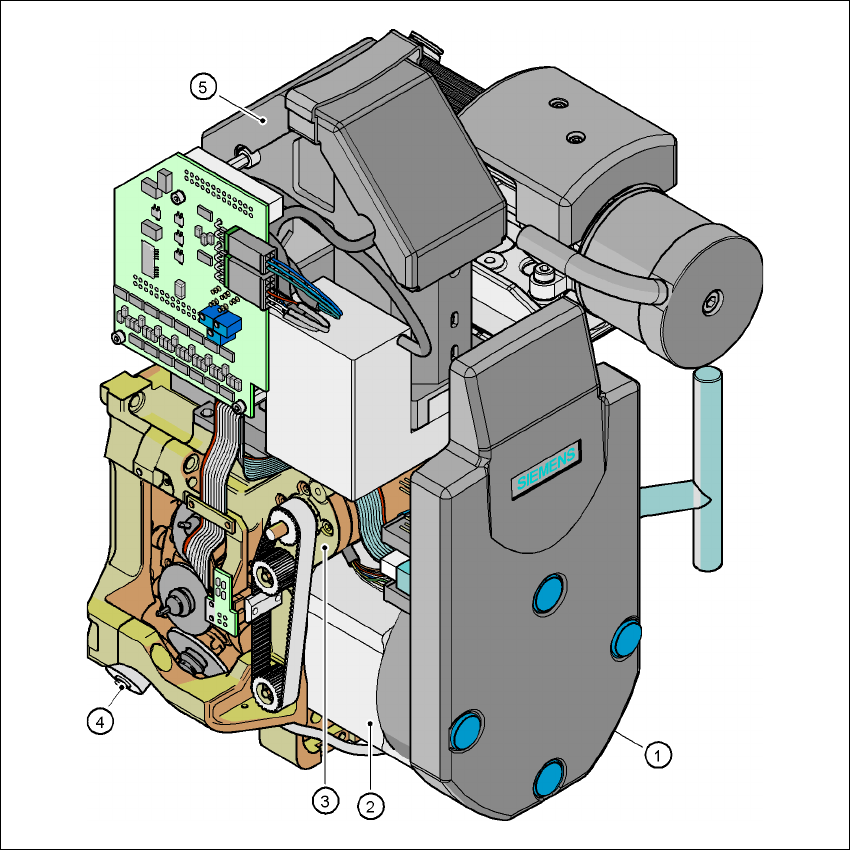
그림 3.7 - 4 12 세그먼트 Collect&Place 헤드 ? 기능 그룹 , 2 부
3
(1)중간 배전기 보드 ( 덮개 아래 )
(2)스타 드라이브 - DR 모터
(3)Z 축 모터
(4)밸브 조절 드라이브
(5)24 x 24 컴포넌트 비전 카메라

3 기술 자료 사용자 매뉴얼 SIPLACE HF 시리즈
3.7 실장 헤드 소프트웨어 버전 SR.505.xx 2004 년 7 월 미국판
102
3.7.2.1 설명
12 세그먼트 Collect& Place 헤드는 Collect&Place 원리에 따라 작동합니다 . 이는 각 주기 내
에서 컴포넌트 12 개가 실장 헤드에 의해 픽업되어 실장 위치에 맞게 광학적으로 센터링되며 필
요한 실장 각도로 회전함을 의미합니다. 그런 다음 압축 공기로 PCB 에 부드럽고 정확하게 장착
됩니다 . SIPLACE Collect&Place 헤드에 있는 노즐 12 개는 기존의 칩 슈터와는 달리 수평 축
을 따라 회전합니다 . 이는 공간을 절약하기만 하는 것이 아닙니다 . 직경이 작아 기존의 칩 슈터
보다 훨씬 작은 원심력이 발생합니다 . 따라서 운반 중에 컴포넌트가 미끄러질 위험이 크게 줄어
듭니다.
또 다른 이점이 있습니다 . 컴포넌트 전체에 대해 Collect& Place 헤드의 주기 시간이 동일한데
, 이는 컴포넌트 크기에 따라 실장률이 좌우되지 않음을 말해
줍니다.
확인 및 자습 기능 3
점검 및 자습 기능이 많아 Collect&Place 헤드의 신뢰성이 높습니다.
– 예를 들어 , 노즐에서의 진공 점검을 통해 컴포넌트가 올바로 픽업 또는 장착되었는지를 알 수
있습니다.
– 피더에 표시를 하여 정확한 컴포넌트 픽업 위치를 알아볼 수 있도록 합니다.
– 실장 헤드의 카메라는 노즐에 있는 각각의 컴포넌트의 정확한 각도를 확인합니다 . 실장 작업
이 수행되기 전에 올바른 픽업 위치에서 벗어난 것이 있다면 이를 교정합니다. 추가로 컴포넌
트를 픽업하면 실장 작업 마지막 10 번에 대한 표준 편차가 고려되므로 픽업 정확도가 더욱 높
아집니다.
– 패키지
형식도 점검하는데 , 기하학적 데이터가 예정 데이터와 다를 경우에는 컴포넌트를 실
장하지 않습니다.
– 컴포넌트를 픽업 및 실장하기 위한 수직 축 (Z 축 ) 은 센서 정지 모드로 작동하는데 , 이 모드에
서는 픽업 중 높이와 PCB 표면의 불균등성의 차이가 실장 중에 보정됩니다. 추가 스트로크
및 실장 속도를 맞출 때 실장 작업 마지막 10 번의 표준 편차도 고려합니다. 정해진 실장력은
항상 같은 상태를 유지합니다.
– 실장 신뢰도를 높이기 위해 C&P 헤드에 컴포넌트 센서를 설치할 수도 있습니다 . 컴포넌트 센
서는 노즐에 컴포넌트가 있는지 여부 이외에도 컴포넌트의 에지 비를 확인합니다. 이런 방식
으로 해서
역으로 컴포넌트가 노즐에 의해 픽업되었는지 아니면 에지에서 픽업되었는지를 파
악할 수 있습니다.
– 12 세그먼트 Collect&Place 헤드는 선택사양인 DCA 비전 모듈을 사용하여 0.6 x 0.3mm
2
에서 13 x 13mm
2
까지의 컴포넌트를 센터링 및 실장할 수 있습니다 . DCA 비전 모듈은 고속
플립 칩 및 베어 다이 컴포넌트를 실장할 때 속도 및 정확도를 최적화합니다. 그 값은 104
페
이지에 있는 표에 나와있습니다.
3.7.2.2 기능 설명
12 세그먼트 Collect&Place 헤드에는 축이 세 개 (DR 또는 스타 축 , Z 축 , DP 축 ) 있습니다.