DECAN_S2_Admin(Chi_Ver4.5).pdf - 第263页
8-17 供应装置的设置 基准相机 4: 选择基准相机 。 头 1 ~ 头 20: 选择 1 号 ~ 20 号头。 < 移动 > 按钮 在组合框中选择的对象移动到指定的坐标位置。 运行 “ 移动 ” 之前, 先要用 鼠标单击需要移动的位置对应的 Grid 的 s hell(St ick Fe eder 的吸附点坐标 ) 。 < 得到 > 按钮 以组合框中选择的对象为基准获取 X, Y 坐标。 运行 “…
8-16
Advanced Chip Shooter DECAN S2 Administrator’s Guide
0: 没有装在任何Slot的情况。
1-52: 安装在1-52号Slot的情况。
3. <改变…> 按钮
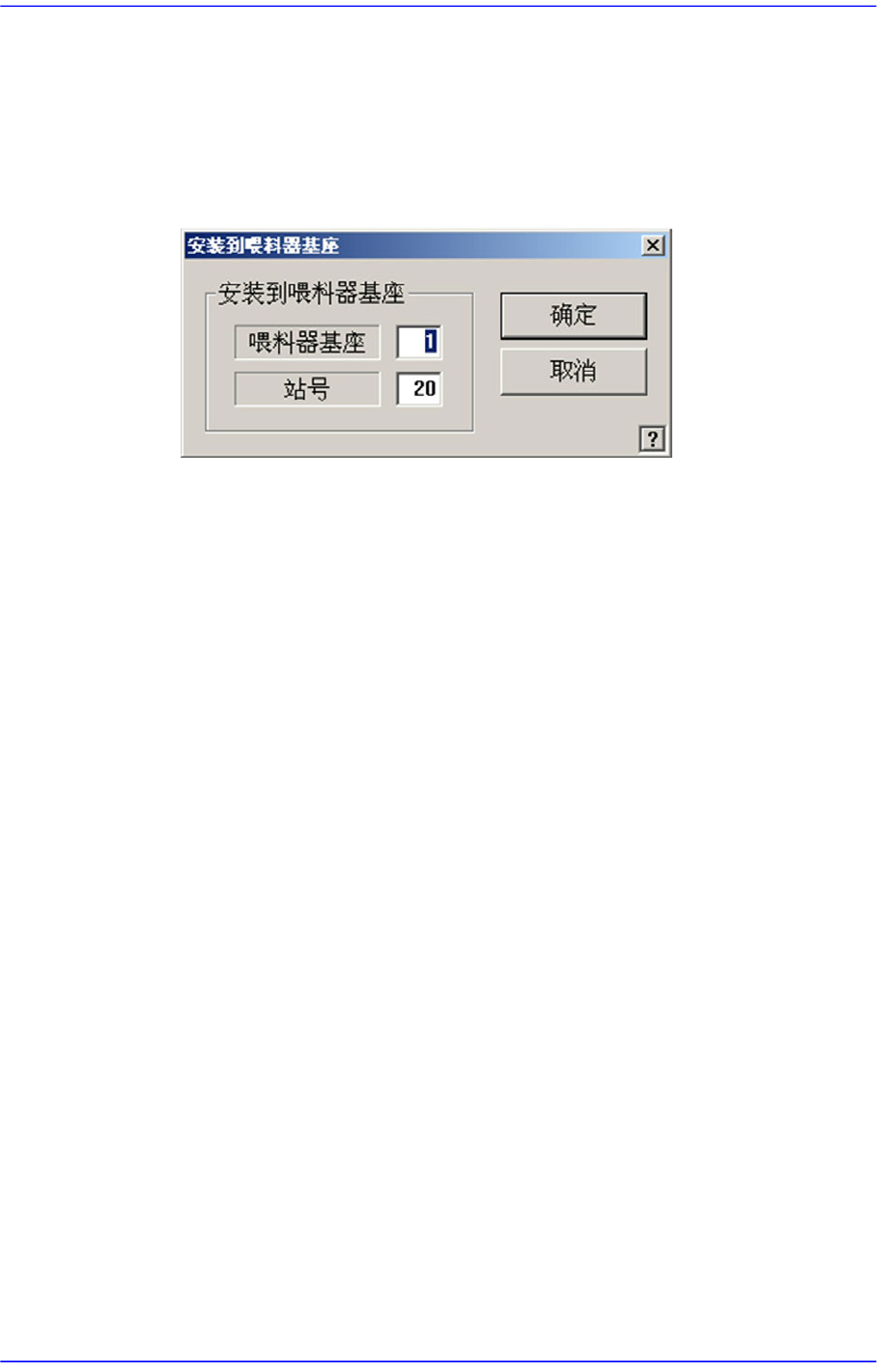
把杆式安装在喂料器基座时,变更将要安装的喂料器基座 单位和Slot的编
号。单击此按钮时显示以下对话框。
<安装到喂料器基座> 领域
喂料器基座
显示装有该杆式的喂料器基座。所表示的编号如下。
0: 没有装在任何喂料器基座的情况。
1: 安装在1号喂料器基座(前面喂料器座)的情况。
2: 安装在2号喂料器基座(前面喂料器座)的情况。
站号
指定要Stick Feeder的Slot。
<确定> 按钮
保存设定内容后关闭对话框。
<取消> 按钮
不保存设定内容关闭对话框。
<示教> 领域
用于旋转XY轴驱动电动机把所选对象移动到指定的坐标位置或用于获取所选
对象的当前坐标。
<Light> 组合框
设定示教时使用的基准相机照明。 详细事项请参照 “7.1.1
共同
Align Data (7-
15
页
)” 。
组合框
用于旋转XY轴驱动电动机选择移动到指定坐标位置的对象或用于选定要获
取当前坐标的对象。可选择的对象如下。
基准相机2: 选择基准相机。

8-17
供应装置的设置
基准相机4: 选择基准相机。
头1 ~ 头20: 选择1号 ~ 20号头。
<移动> 按钮
在组合框中选择的对象移动到指定的坐标位置。 运行 “移动”之前,先要用
鼠标单击需要移动的位置对应的Grid的shell(Stick Feeder的吸附点坐标)。
<得到> 按钮
以组合框中选择的对象为基准获取X, Y 坐标。 运行 “ 得到” 之前,先要用鼠
标单击需要移动的位置对应的Grid的shell(Stick Feeder的吸附点坐标)。
<拾取> 按钮
从当前选定的Stick Feeder进行部件贴装。此时,应该提前选择所要贴装部件的
磁头Device)。 成功地吸着后显示以下对话框。
详细内容请参照 “8.1.1
喂料器基座
(
Feeder Base
)
”的 <Pick> 按钮。
<两点示教…> 按钮
它执行示教杆式喂料器的吸着点时,通过示教装有部品的Pocket对角线两段的2
个点的方法来算出中心点的功能。 详细内容请参照 “8.1.1
喂料器基座
(
Feeder
Base
)
“的 <2Pt. Teach…> 按钮。
<偏移量> 按钮
Feeder的Pickup Z值一概适用偏移(Offset)。
<Z>编辑框
输入偏移值(Offset)。
<确定> 按钮
保存设定内容后关闭对话框。
<取消> 按钮
不保存设定内容关闭对话框。
<Z轴示教>按钮
利用空压自动测定对Feeder吸附点的Z轴高度。在HEAD的喷嘴插槽插入CN040
喷嘴后在<Grid>领域选择要测量Z轴高度的Stick Feeder,然后点击<移动>按
钮。
8-18
Advanced Chip Shooter DECAN S2 Administrator’s Guide
然后点击此按钮则自动执行Z轴高度测量。
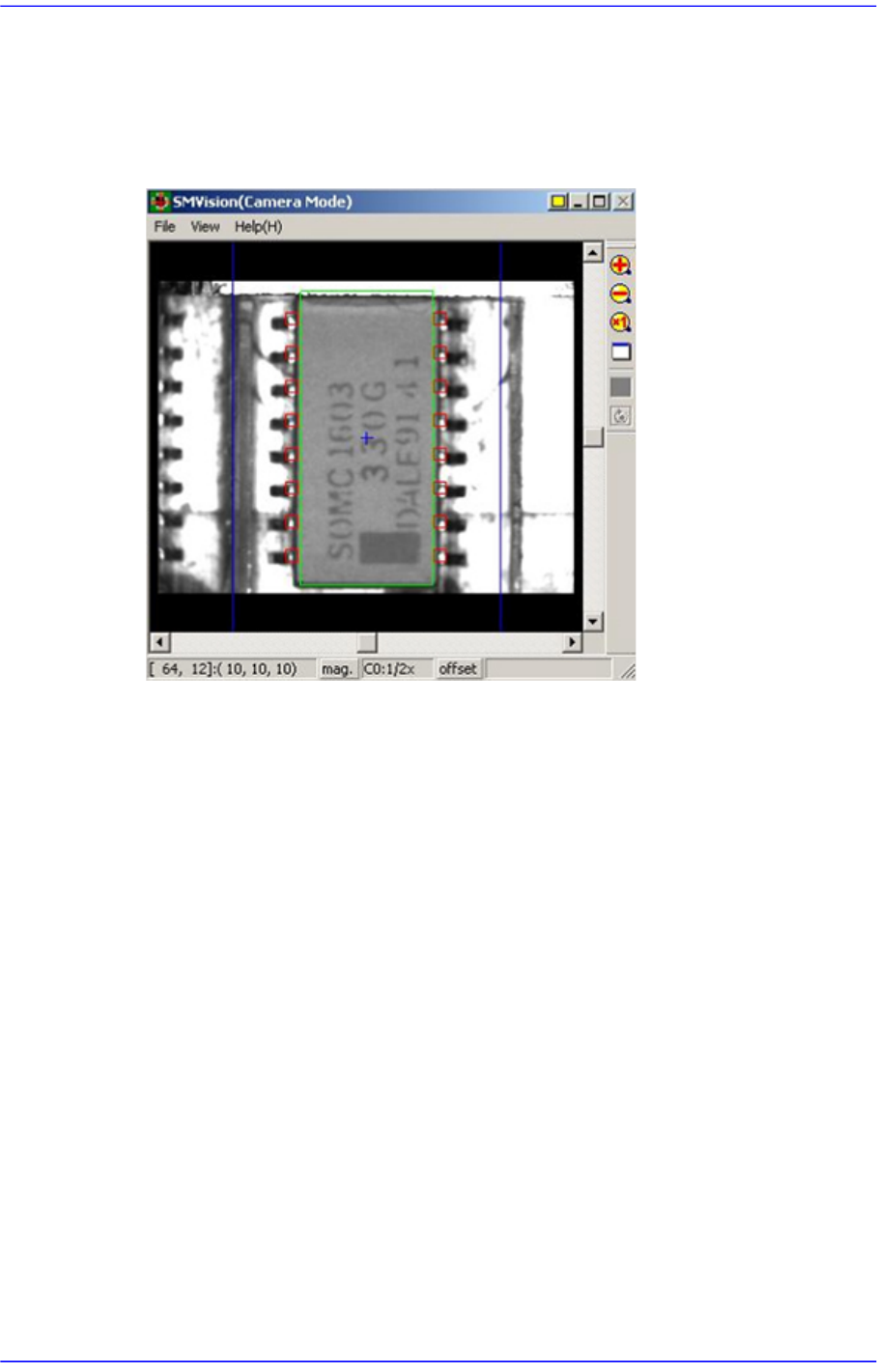
<Part Outline> 选择框
如果选择此选择框,为确认吸附位置把Fiducial Camera移动到相应喂料器位置,
则在SMVision窗口显示考虑到相应部件Pick-up角度的out line形象。
<显示> 按钮
用图象显示实际设置在喂料器底座上的喂料器形象。