4. SM411F_Introduction(Kor_Ver5).pdf - 第51页
2-9 장비의 사양 2.6. 기판 사양 2.6.1. PCB 의 규격 , 휨 허용 오차 O: 표준 , ◎ : Factory Option, X: 적용 안됨 표 2.3 PCB 사양 구 분 사 양 SM41 1F 비 고 최대 크기 (L)510mm x (W)300mm O (L)510mm x (W)350mm O 스토퍼 위치 변경 STF-100S 적용불가 (L)610mm x (W)350mm (L)660mm…
2-8
Samsung Component Placer SM411/411N Introduction
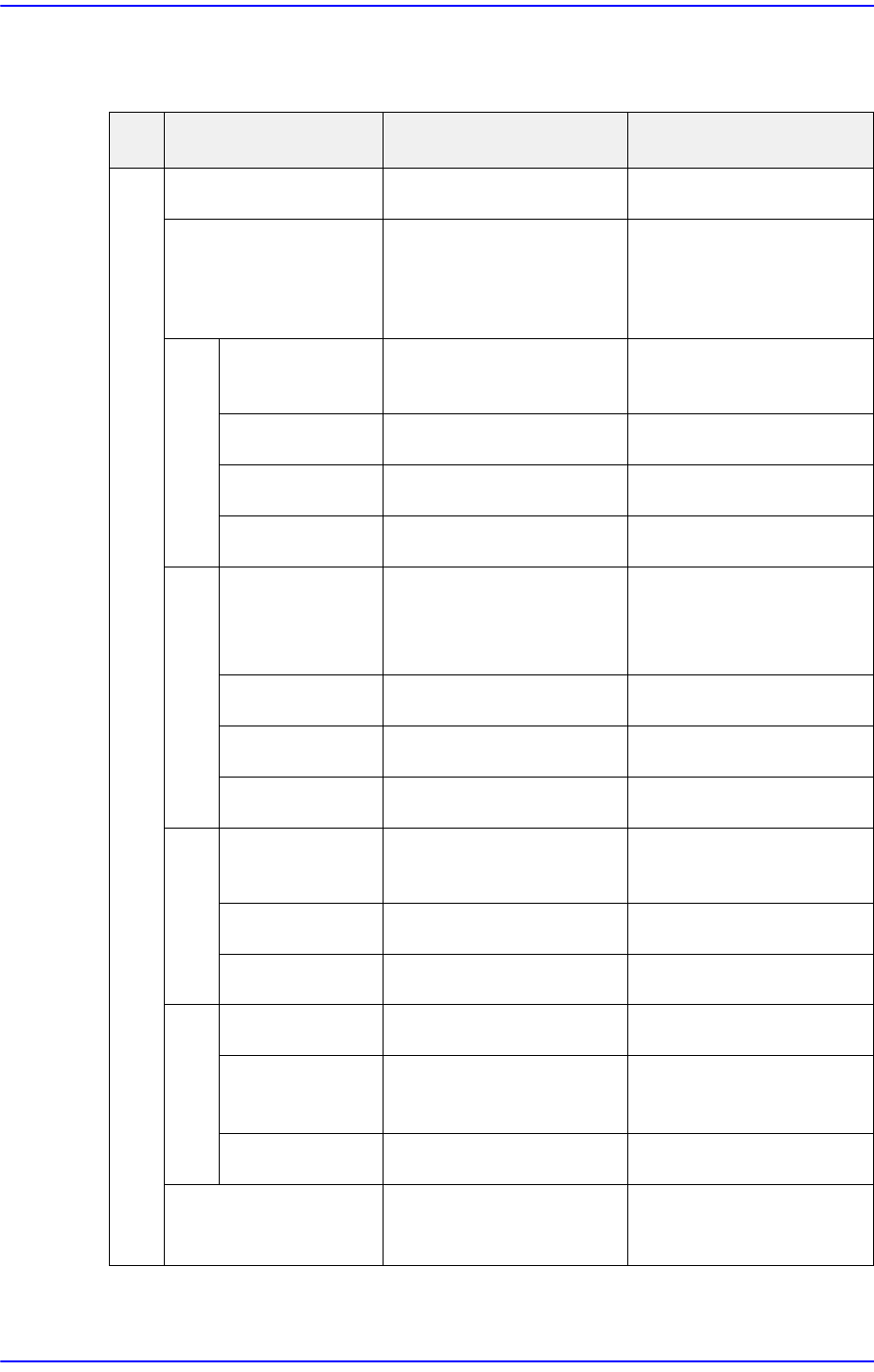
2.5. Head 사양
표
2.2 Head
사양
구분
Item
사양 비고
Head
노즐 수량 6 Nozzle 기본사양 1 Nozzle 선택사양
헤드 pitch
30 mm
8mm, 12mm, 16mm
피더
동시흡착 가능 피치
Z축
Mechanism
AC Servo motor + Belt &
LM
Motor: 30W
동작 범위 최대 96 mm
Stopper to stopper
분해능
0.005 mm/pulse
티칭 기준
반복 정도 ± 0.01 mm
R축
Mechanism
Micro stepping motor +
Belt & Pulley
Head 1/2, 3/4, 5/6 Pair
Head 7/8, 9/10, 11/12
Pair
동작 범위 Unlimited°
분해능
0.014 °/pulse 티칭 기준
반복 정도 ± 0.03 °
Swing Mirror
Mechanism
AC servo motor + Belt &
Cam
Motor: 50 W
분해능
0.018˚/pulse
반복 정도 ±0.02˚
Nozzle holder
Clamping 방법
Taper clamp + Ball
Clamping ball의
수
3 개
Cushion
Cushion 없음 Nozzle에 Cushion 설치
인식 방법
Fly Camera (CCD)
Fix Camera (CCD)
Digital 조명 제어
2-9
장비의
사양
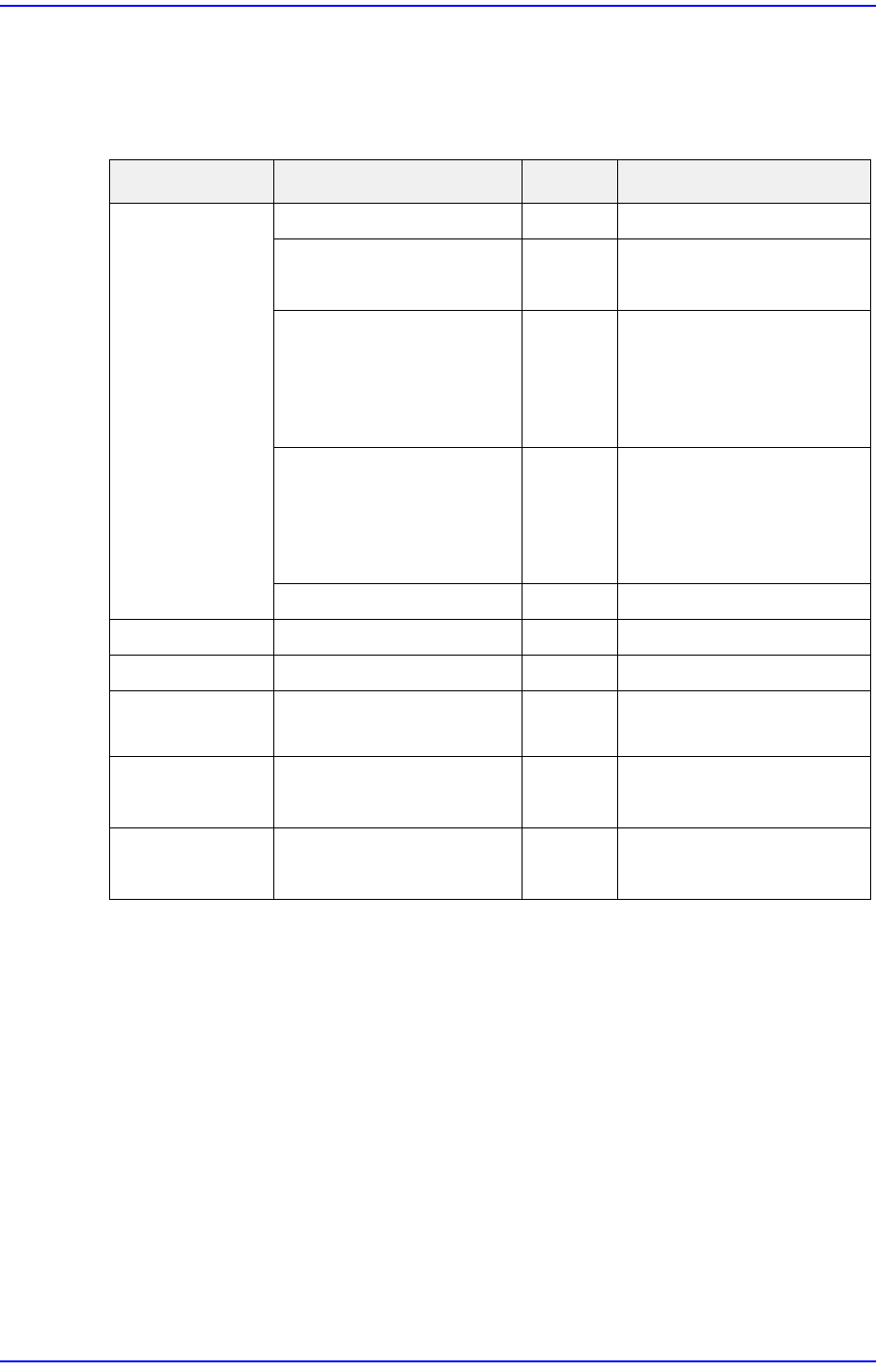
2.6. 기판 사양
2.6.1. PCB의 규격, 휨 허용 오차
O: 표준, ◎: Factory Option, X:적용 안됨
표
2.3 PCB
사양
구 분 사 양
SM411F
비 고
최대 크기
(L)510mm x (W)300mm
O
(L)510mm x (W)350mm
O
스토퍼 위치 변경
STF-100S 적용불가
(L)610mm x (W)350mm
(L)660mm x (W)350mm
◎
스토퍼 위치 변경
입구 및 출구 확장레일 추
가 필요
STF-100S 적용불가
(L)660mm x (W)420mm
(L)750mm x (W)420mm
◎
스토퍼 위치 변경
입구 및 출구 확장레일 추
가 필요
STF-100S 적용불가
(L)310mm x (W)250mm
◎
후면 컨베이어 기준
최소 크기 (L)50mm x (W)40mm
O
두 께
0.38 mm ~ 4.2 mm
이송가능PCB
2.0 Kg
(L)750mm x (W)420mm
PCB 적용시 3kg
휨 허용오차
(위 ):0.5mm,
(아래):1.5mm
부품상하대응
(위 ):12mm,
(아래):30mm
센서의 위치에 따라 다소
차이가 날 수 있음.
2-10
Samsung Component Placer SM411/411N Introduction
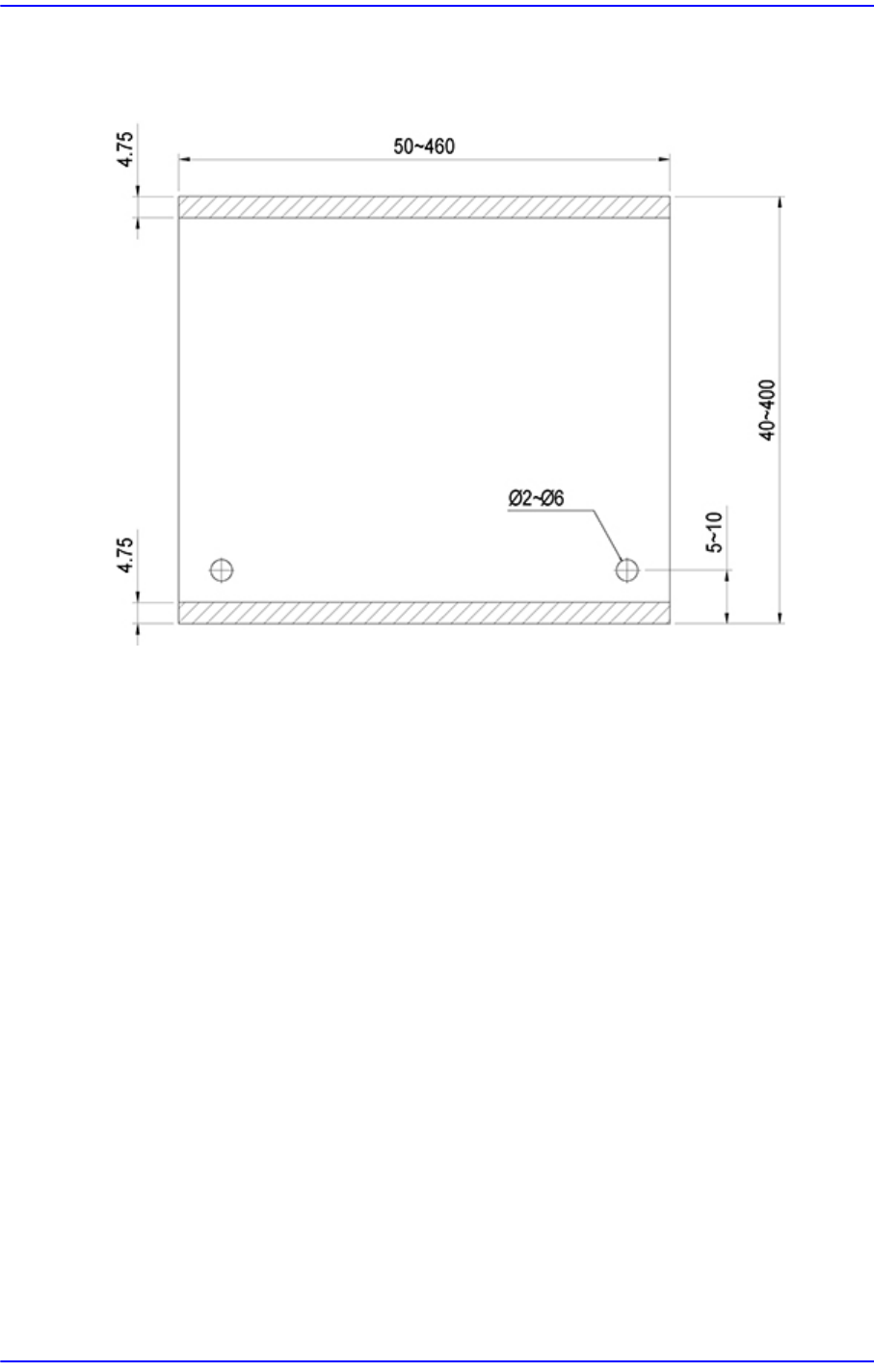
2.6.2. PCB 기판의 조건
그림
2.1 PCB
기판의
제한
조건
기판의 가장자리에 4.75 mm의 여유 간격이 생깁니다. 기판의 상부 여유는 12 mm이
고 하부의 여유는 30 mm입니다.
기판의 지지는 132.3 mm 높이의 Back Up Pin 지지 방식을 사용합니다.
PCB 고정방법
기본적으로 컨베이어 클램프를 이용해 PCB를 고정시킵니다. PCB옆면을 고정
시키는 외곽 고정방법을 선택적으로 사용가능하고, 두 가지 방법의 복합적인 사
용도 가능합니다.
PCB 이송방향
PCB를 왼쪽에서 오른쪽으로, 오른쪽에서 왼쪽으로 모두 이송가능하며 , 사용자
가 임의의 수
정하기 보다는 당사에 요청을 하는 것이 바람직합니다.