4. SM411F_Introduction(Kor_Ver5).pdf - 第87页
6-9 Module Function 그림 6.7 광로제어 6.6.3. 조명 Flying V ision System 은 각 헤드 별로 Side, Outer 조명 등 2 가지 조명 방식을 사용할 수 있습니다 . Side 조명과 Outer 조명은 헤드에 조 립되어 있습니다 .
6-8
Samsung Component Placer SM411/411N Introduction
6.6. Flying Vision
6.6.1. 개요
Flying Vision System은 6개 헤드가 부품을 흡착위치에서 장착위치로 이송 시키기
위해 이송 중에 부품을 비전으로 인식하는 시스템입니다. 6개의 CCD Camera로 6헤
드의 부품을 동시 인식 할 수 있으며, 각 헤드 별로 2 가지 방식의 다단계 디지털 조
명을 선택적으로 사용할 수 있습니다.
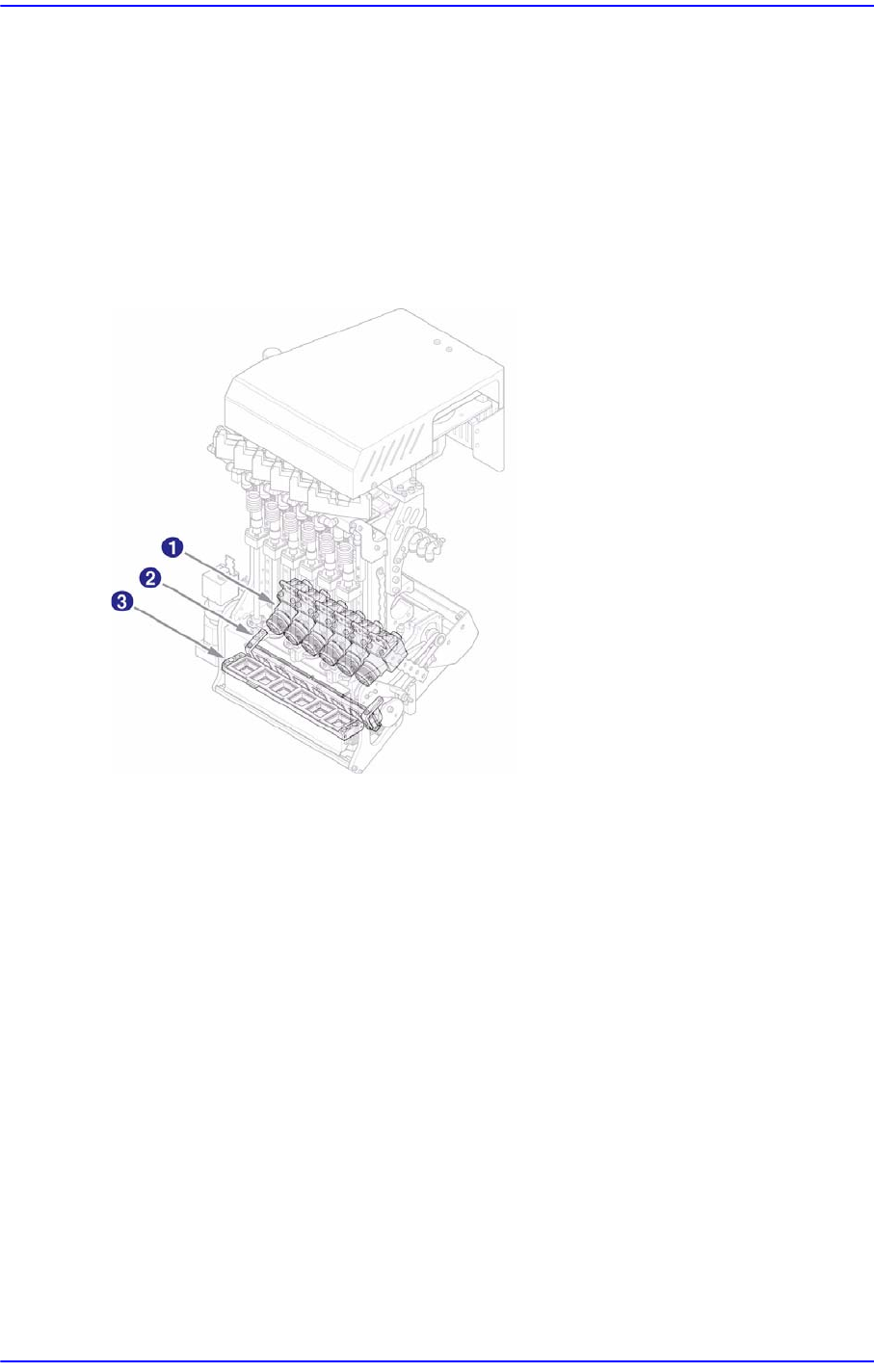
그림
6.6 Samsung Flying Vision
1: Fly Camera
2:
조명
3: Mirror
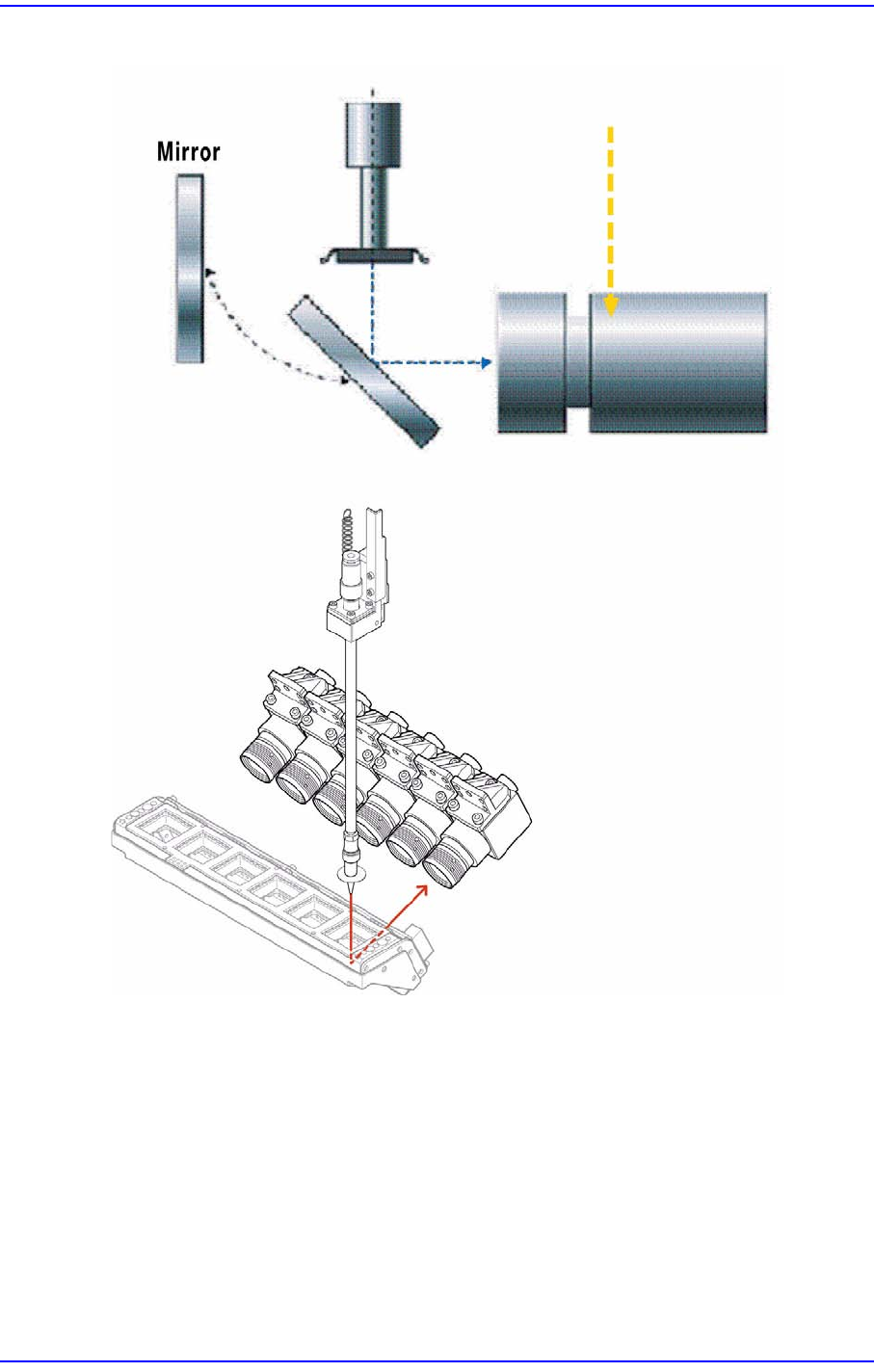
6.6.2. 광로제어
Flying Vision System은 수평으로 위치한 Camera가 수직으로 위치한 부품을 인식하
기 위해 광로 상에 거울을 사용하고 있습니다 . 부품의 흡착 시, 헤드에 부착된 거울
은 헤드전면으로 회전 이동됩니다. 부품이 흡착된 후 장착위치로 이동 중에 거울이
헤드 밑면으로 회전 이동되어 부품의 화상이 거울을 통하여 헤드에 부착된 CCD
Camera에 결상됩니다.
결상된 화상은 Vision처리되어 부품의 위치 및 각도가 인
식됩니다. 인식된 부품의
위치 및 각도를 이용하여 장착좌표가 보정되고 , 보정위치에서 부품을 장착하는 경
우에는 거울은 다시 헤드전면으로 회전하여 이동됩니다.
6-9
Module Function
그림
6.7
광로제어
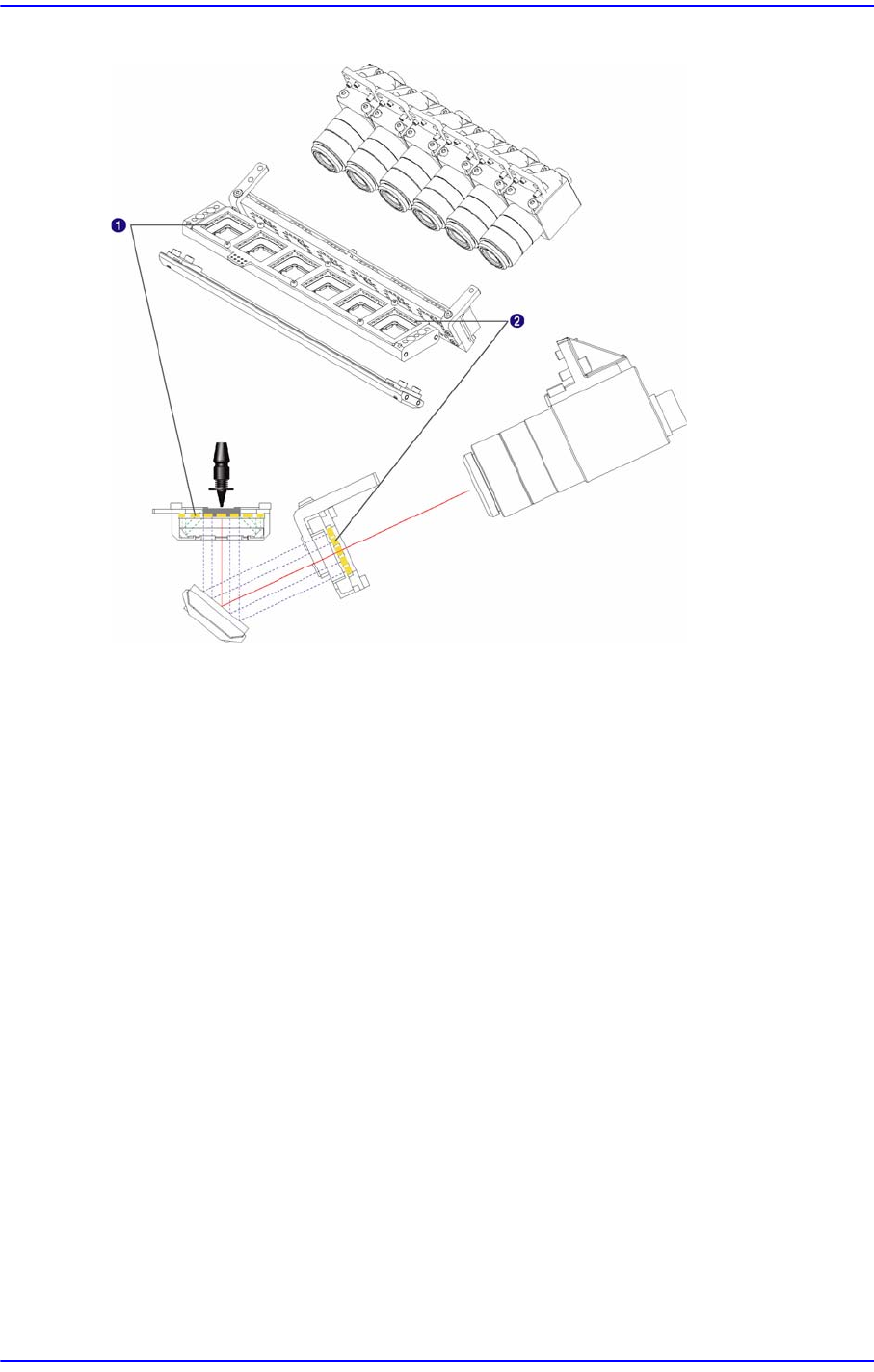
6.6.3. 조명
Flying Vision System은 각 헤드 별로 Side, Outer 조명 등 2 가지 조명 방식을 사용할
수 있습니다. Side 조명과 Outer조명은 헤드에 조립되어 있습니다.
6-10
Samsung Component Placer SM411/411N Introduction
그림
6.8
조명
1: Side
조명
2: Outer
조명
6.6.3.1. Side조명
Side조명은 부품의 옆면에서 비추어지는 조명입니다. 이 조명은 Z축 방향으로 움직
이는 기구물에 설치되어 사용되지 않을 때에는 위쪽으로 이동되어있다가, 부품의
인식시에 기구물이 내려와서 부품을 비추게 됩니다. 이 조명은 BGA부품의 인식시
Ball을 비추는데 사용되며, Chip 또는 IC 부품의 외곽부분을 강조할 때에도 사용됩
니다. 0~15 단계로 조절이 가능합니다.
6.6.3.2. Outer조명
Outer조명은 부품의 전면에서 비스듬히 비추어지는 조명입니다. 이 조명은 부품을
전체적으로 비춰주는 조명입니다. 대부분의 부품에 사용되며 0~15 단계로 조절이
가능합니다.