4. SM411F_Introduction(Kor_Ver5).pdf - 第63页
3-5 장비의 명칭 및 구성 3.3. 좌표계 본 장비의 기본적인 좌표계는 다음의 그림에 나타낸 바와 같습 니다 . 그림 3.4 장비의 좌표계 3.3.1. X, Y 축 Head, ANC, 장착점 (Placement Position), 기판 Fiducial Mark 의 위치를 표 시합니다 . 3.3.2. Z 축 Z 축은 Head 에서 노즐 끝의 위치를 표시 하며 고정된 기판의 상면의 위치를 0 …
3-4
Samsung Component Placer SM411/411N Introduction
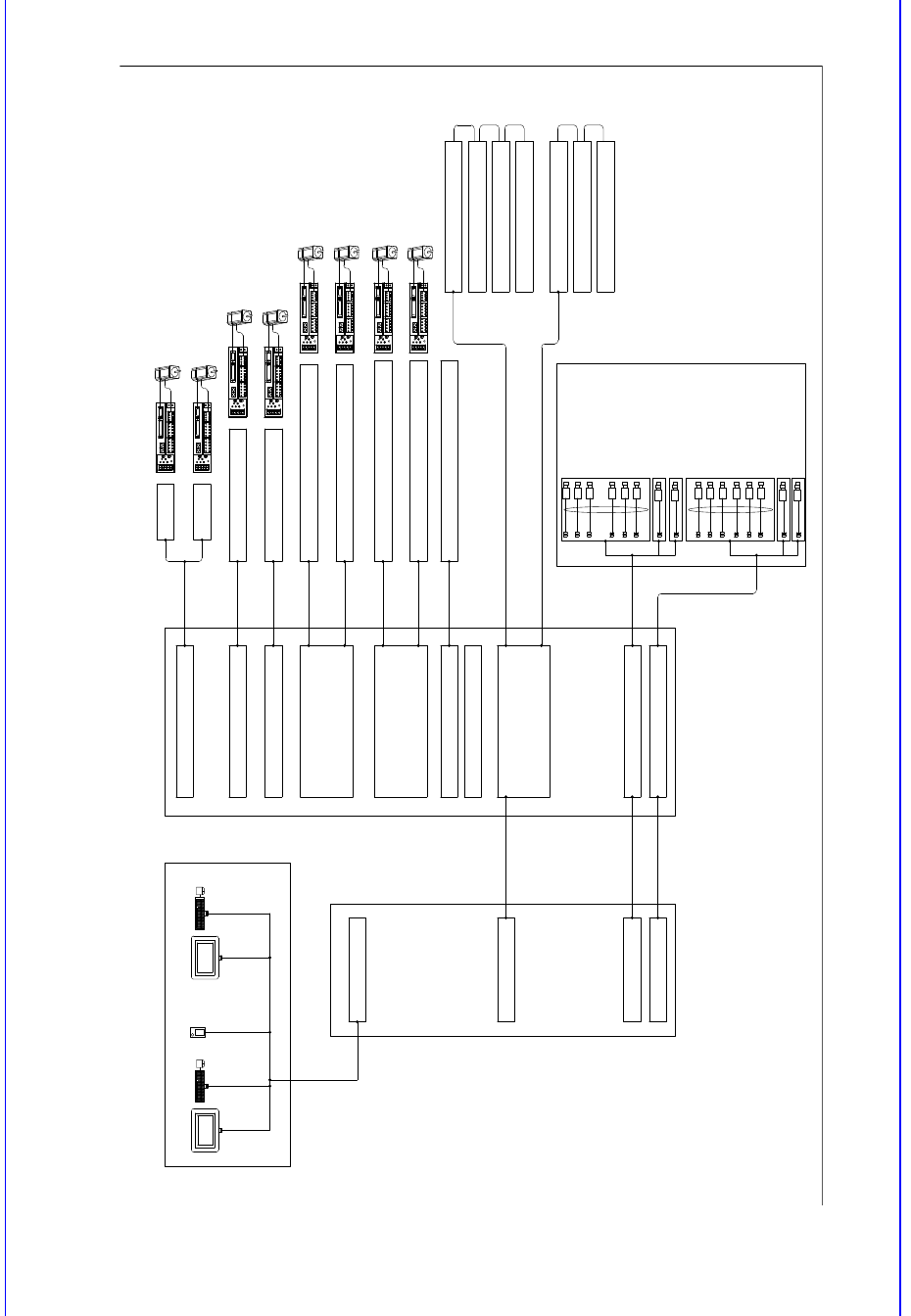
3.2.2. 제어부 구성
그림
3.3
제어부
구성도
Panasonic AC servo
SET
MODE
Panasonic AC servo
SET
MODE
Panasonic AC servo
SET
MODE
Panasonic AC servo
SET
MODE
Panasonic AC servo
SET
MODE
Panasonic AC servo
SET
MODE
Panasonic AC servo
SET
MODE
Panasonic AC servo
SET
MODE
MON.
KBD MOUSE
T- BO X
MON.
KBD MOUSE
SBC
INDUSTRIAL PC
PCI IO B/D
SAMC-62 B/D #1
SAMC-62 B/D #2
VME RACK ASSY
X7043-SEDES B/D
VM E IO B/ D
VISION I/F B/D #1
VISION I/F B/D #2
X7043 NEW TWIN SERVO B/D
X7043-STEP CONTROL B/D
X7043-STEP CONTROL B/D
X7043-SEDES B/D
FY1-FY2
(4AXIS )
RY1-RY2
WD, CB1, CB2, WB1, WB2
CB3, CB4
FZ1, FZ2, FZ3, FZ4, FZ5, FZ6 (HEAD1)
FS, FX, FR1, FR3, FR5 (GANTRY1)
RZ1, RZ2, RZ3, RZ4, RZ5, RZ6 (HEAD2)
RS, RX, RR1, RR3, RR5 (GANTRY2)
HEAD1, 2 VAC/BLOW ON/OFF CONTROL
VME 3100 B/D
CAN MASTER B/D CAN1
CAN2
CAN CO NVEYOR I/ F B/ D (#2)
FRONT FEEDER IO B/D (#1)
HEAD IO B/D (#3)
HEAD IO B/D (#4)
CAN CO NVEYOR I/ F B/ D (#2)
FRONT FEEDER IO B/D (#1)
HEAD IO B/D (#3)
CAN1
CAN2
FLY CAMERA1~6
FIDUCIAL CAMERA #1
FLY CAMERA7~12
FIDUCIAL CAMERA #2
VISION PART
USER I/F
CAN1
CAN1
CAN1
CAN2
CAN2
FRONT FIX CAMERA
REAR FIX CAMERA
3-5
장비의
명칭
및
구성
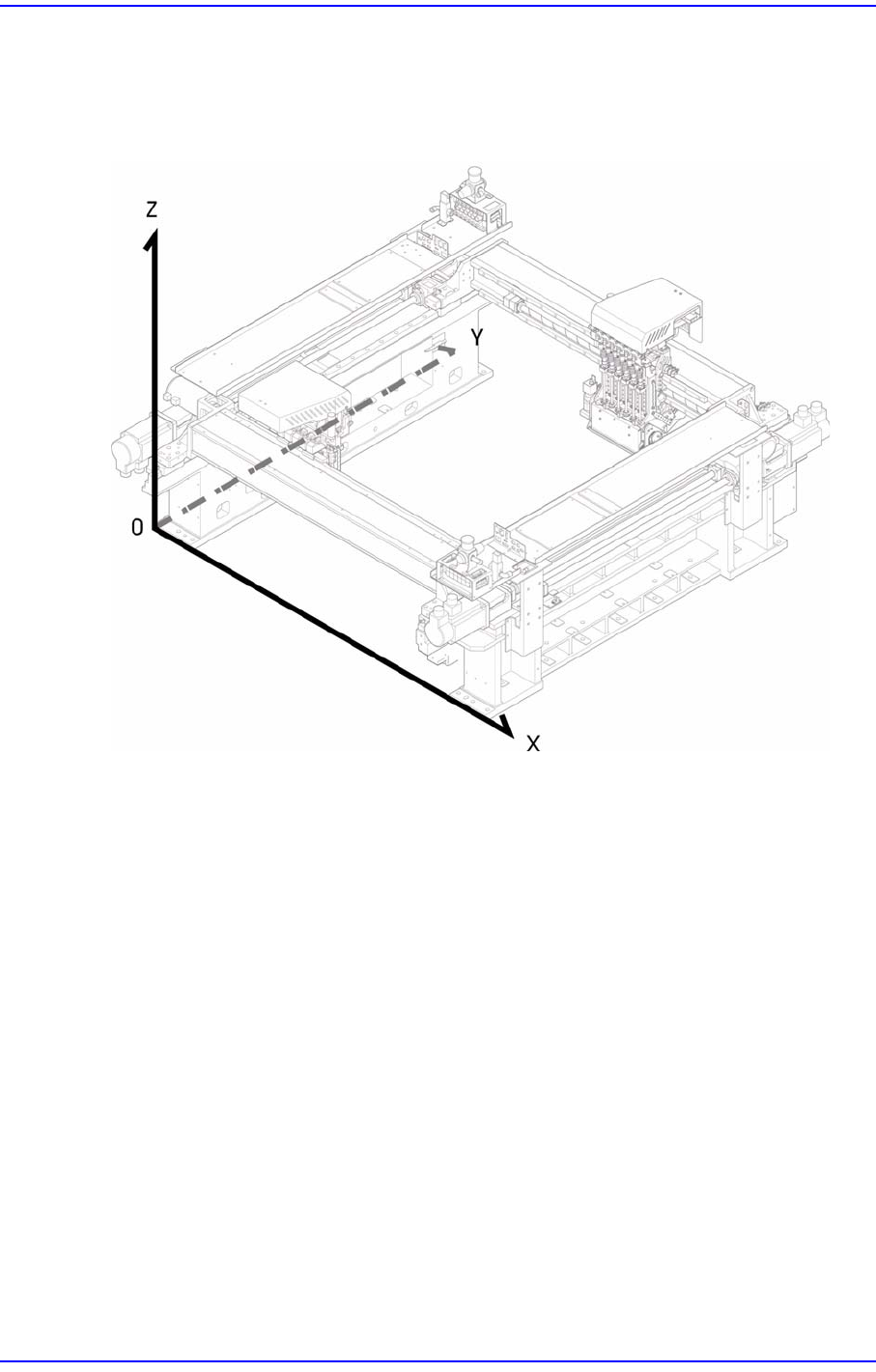
3.3. 좌표계
본 장비의 기본적인 좌표계는 다음의 그림에 나타낸 바와 같습니다.
그림
3.4
장비의
좌표계
3.3.1. X, Y축
Head, ANC, 장착점(Placement Position), 기판 Fiducial Mark의 위치를 표시합니다.
3.3.2. Z 축
Z축은 Head에서 노즐 끝의 위치를 표시하며 고정된 기판의 상면의 위치를 0으로 표
시합니다.
3-6
Samsung Component Placer SM411/411N Introduction
3.3.3. Theta (R) 축
Head가 부품을 Centering 하는 각도를 표시합니다. 반 시계방향의 회전을 +, 시계방
향의 회전을 -로 합니다.
1: R
축
회전방향
(+)
2: Z
축
높이
(+)
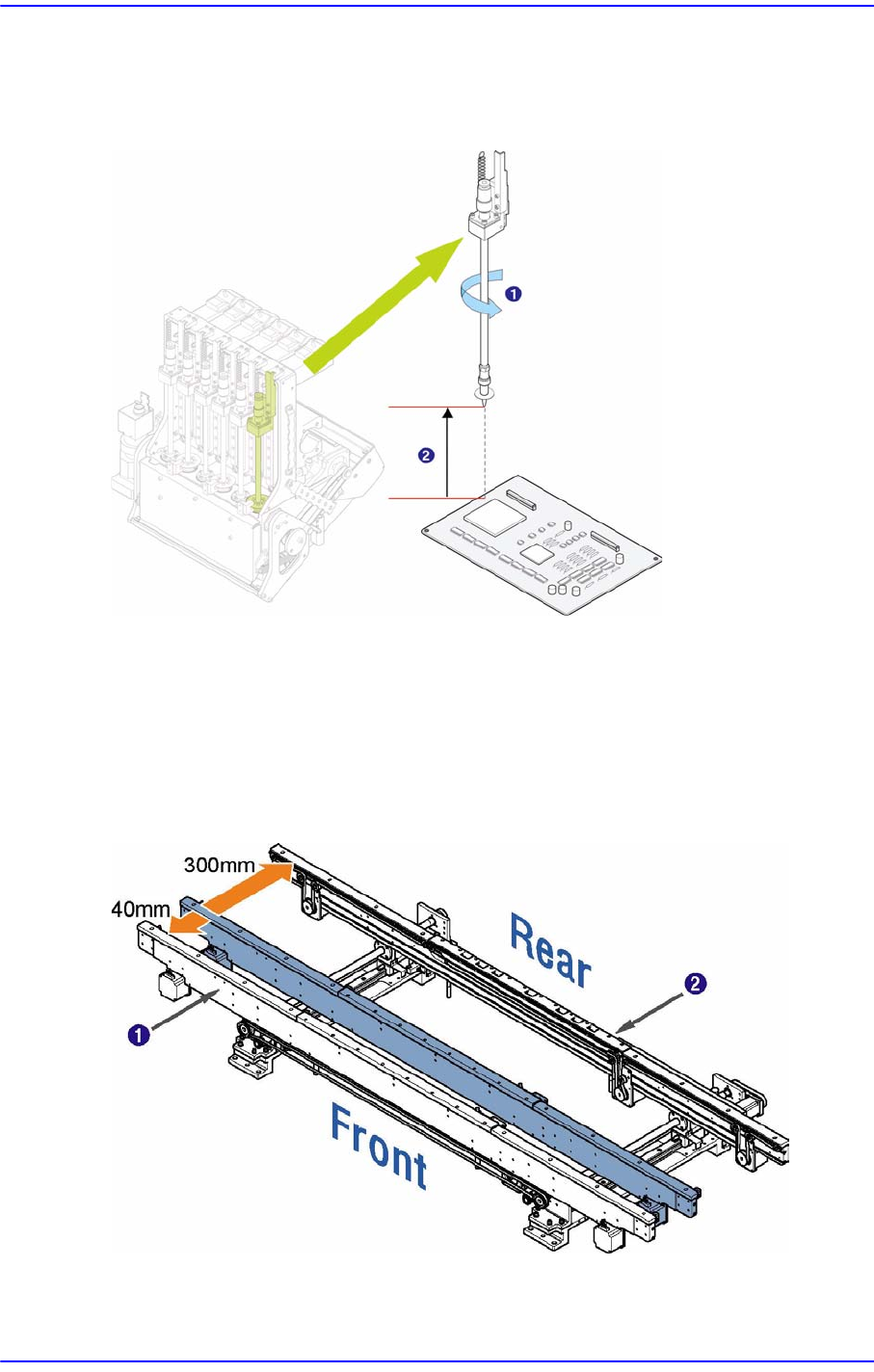
3.3.4. Conveyor 축
컨베이어 고정 프레임(Fixed Frame)을 기준으로 컨베이어 이동 프레임(Moving
Frame)을 이동시켜 컨베이어 폭을 조절합니다.
1:
이동
프레임
2:
고정
프레임