KD-2077_MS参数.pdf - 第25页
MS 参数 附属装置(选项) 功能 设定为安装附属装置 使用治具 本设定不使用治具 操作 选择了 初期設置 选项 单元 …
Rev.1.1
MS 参数
3-2
3-2. 原点粗调整
3-2-1. 功能
通过示教取得相对于软件原点的设计坐标的偏差量。
3-2-2. 使用治具
治具 PWB (40071849)
3-2-3. 操作
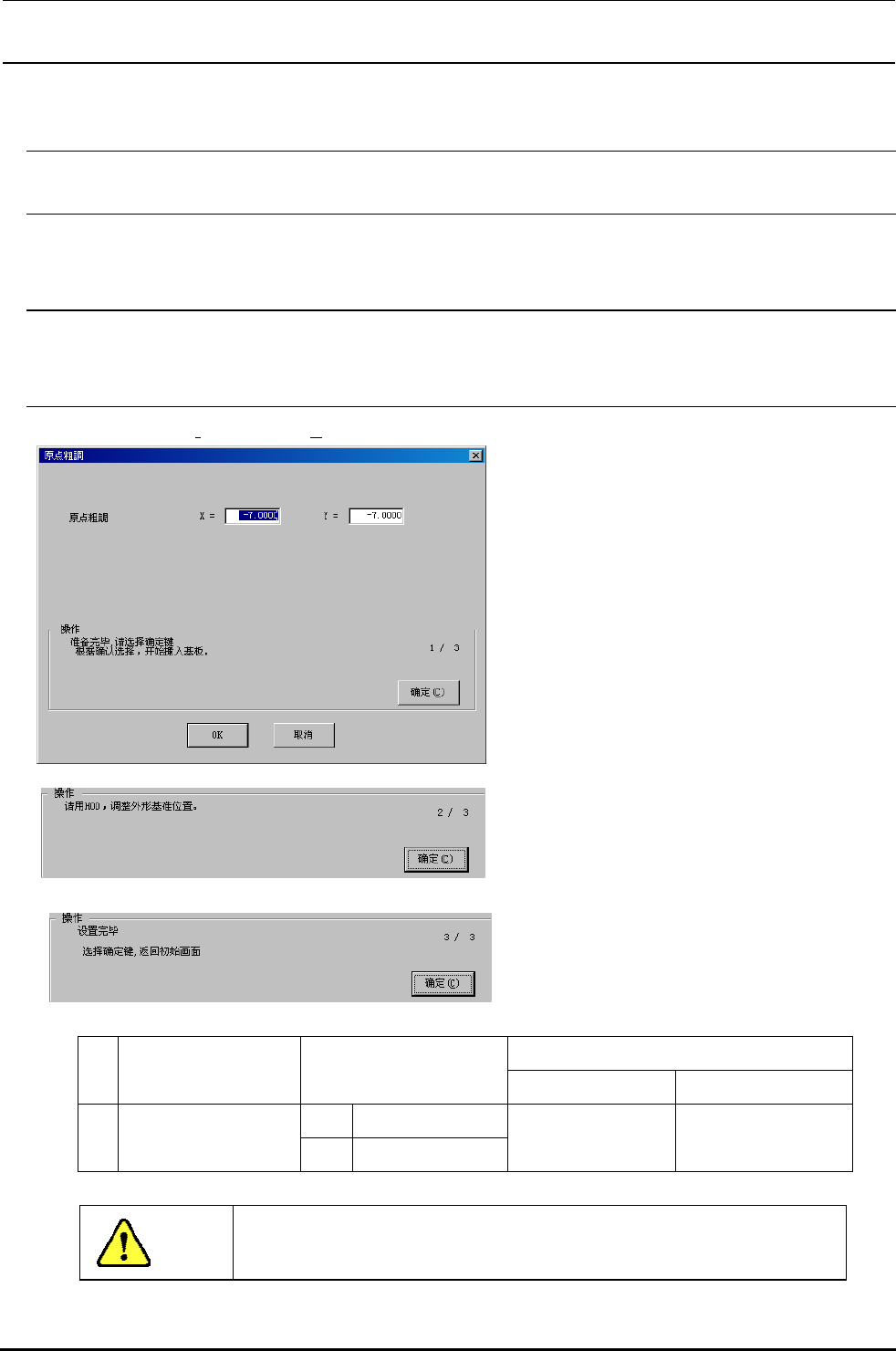
选择了[初期設置(I)][原点粗调(R)...]之后,写列的原点粗调画面显示出来。
<1/3画面>
准备好之后,选择确认。
选择确认键之后,基板将通过外形基准搬入。
(没有 PWB 治具时请使用 3mm 厚的基板。)
<2/3画面>
看 OCC 的监视器,请用示教,将外形基准位
置座标分别演示到 XY。X 的编辑框里出现焦点
时 X 更新,Y 的编辑框里出现焦点时 Y 更新。
哪个编辑框里都不出现焦点时,就不更新。
<3/3画面>
设定结束。
确认了选择之后,返回到初期操作画面。
请结束后,做原点复位。
MSP
值时
不良
No 项目 MSP
许
允位置
异常点 调整(检查项目)
X -15.0~1.0 ㎜
1 原点粗调
Y -15.0~1.0 ㎜
原点复位不动作
注意
原点复位后请确认机器安装的外形基准位置和试胶开始位置。
MS 参数
附属装置(选项)
功能
设定为安装附属装置
使用治具
本设定不使用治具
操作
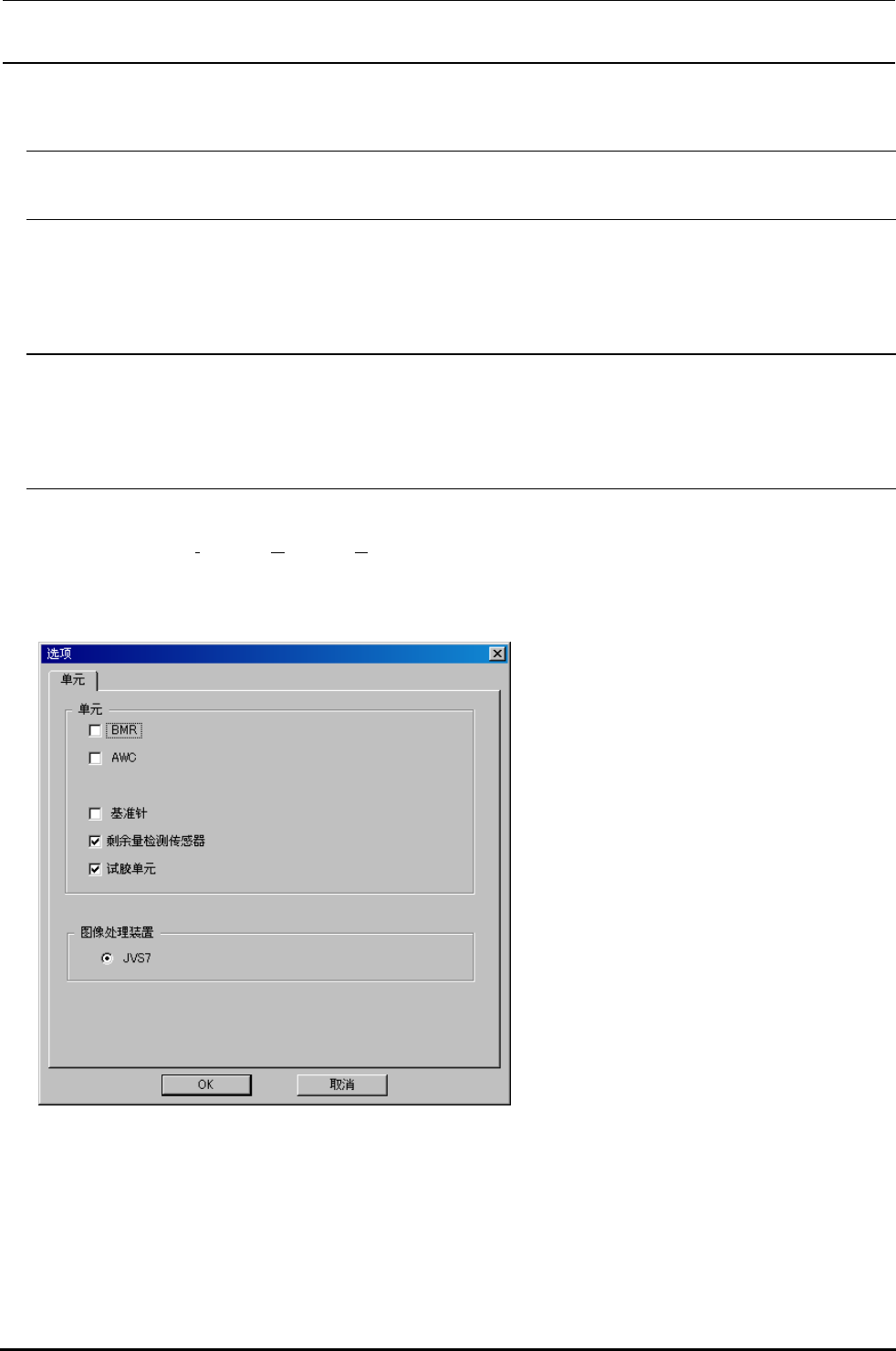
选择了初期設置
选项单元之后,下列选项设定画面显示出来
单元
把安装的单元变更为为安装之后,机器
设置的使用单元便自动变成不使用
追加单元等,从未安装变更为安装之后,
机器设置的使用单元自动地变成使
用
MS 参数
动作规格
功能
设定各轴的动作和传送动作的详细规格
使用治具
本设定不使用治具
操作
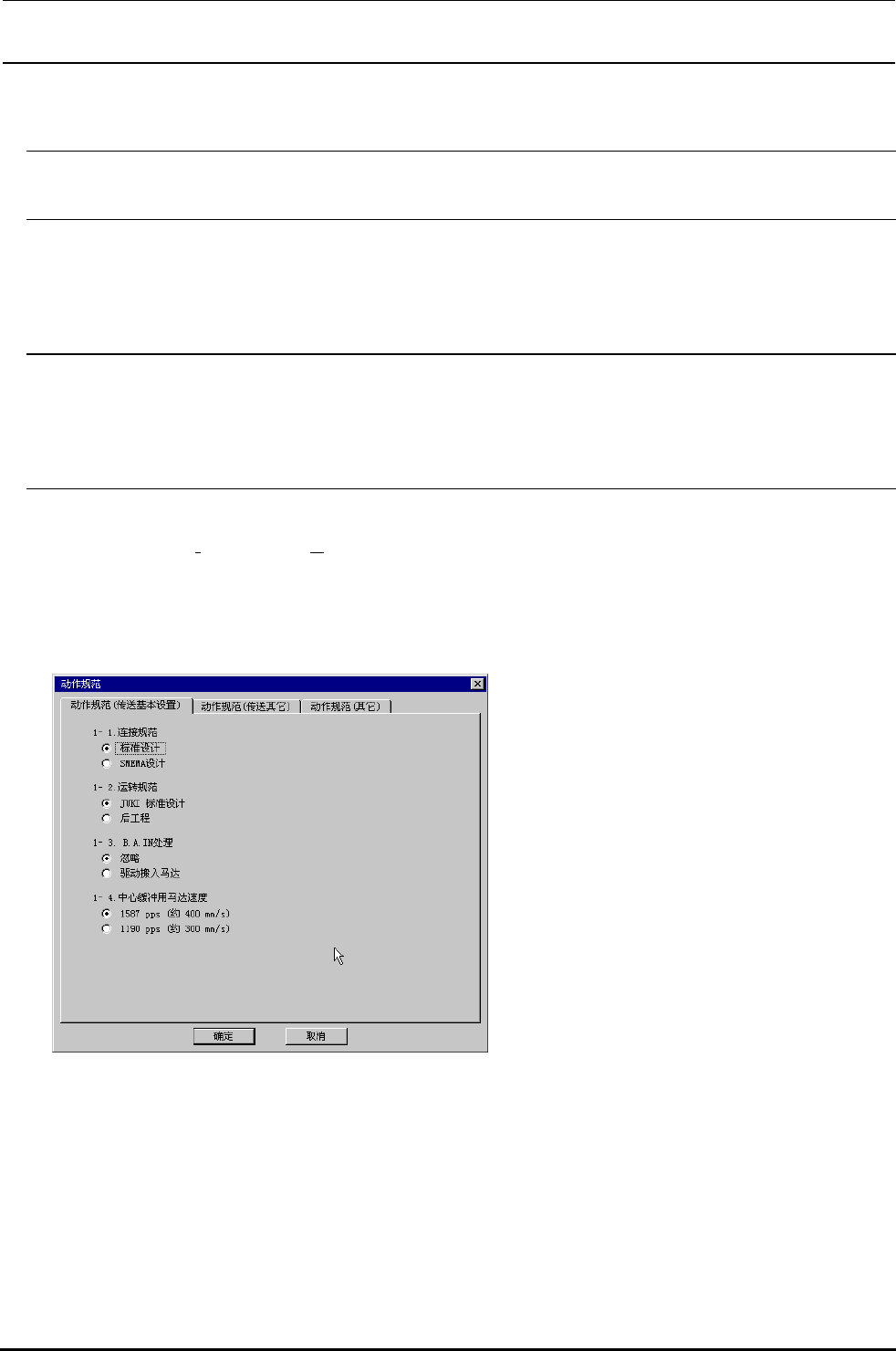
选择了初期設置
动作规格之后,下面的画面显示出来各项目请用黑点选择动作规范
动作规范传送基本设定
选择动作规范传送基本设置之后,左
面的画面显示出来。请用黑点选择动作规
范