KD-2077_MS参数.pdf - 第52页
MS 参数 操作 通过演示, 求可动轨道内侧的 坐标, 然 后按 的确定键 演示完毕,用求的 坐标计算新的偏差 值 准备完毕,选择确认 操作 设定完毕 选择了确认之后,返回到初期設置画面 …
MS 参数
传送偏差
偏差(选购)
功能
演示原点复位时的传送宽度,以便 能正确动作
项目 设定内容
原点偏差 离 原点设计位置的偏差值
调整宽度偏差 移动时的富余宽度
使用治具
本设定不使用治具
操作
选择了偏差设定
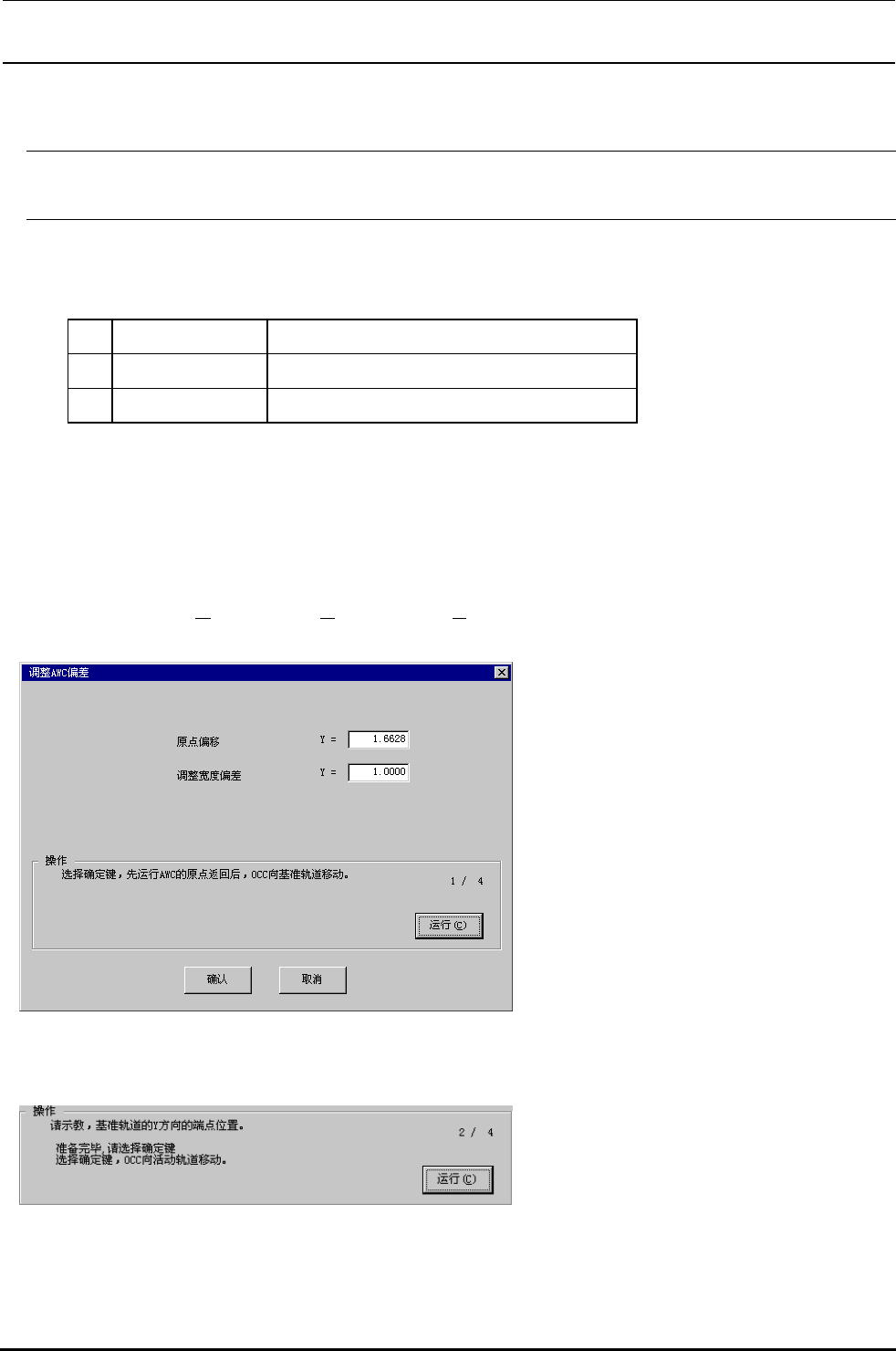
传送偏差偏差之后,显示出下面的调整偏差的设定画面。
操作
准备完毕,请选择确认
选择了确认之后, 原点复位,
移动到基准轨上
原点在最大基板宽度附近
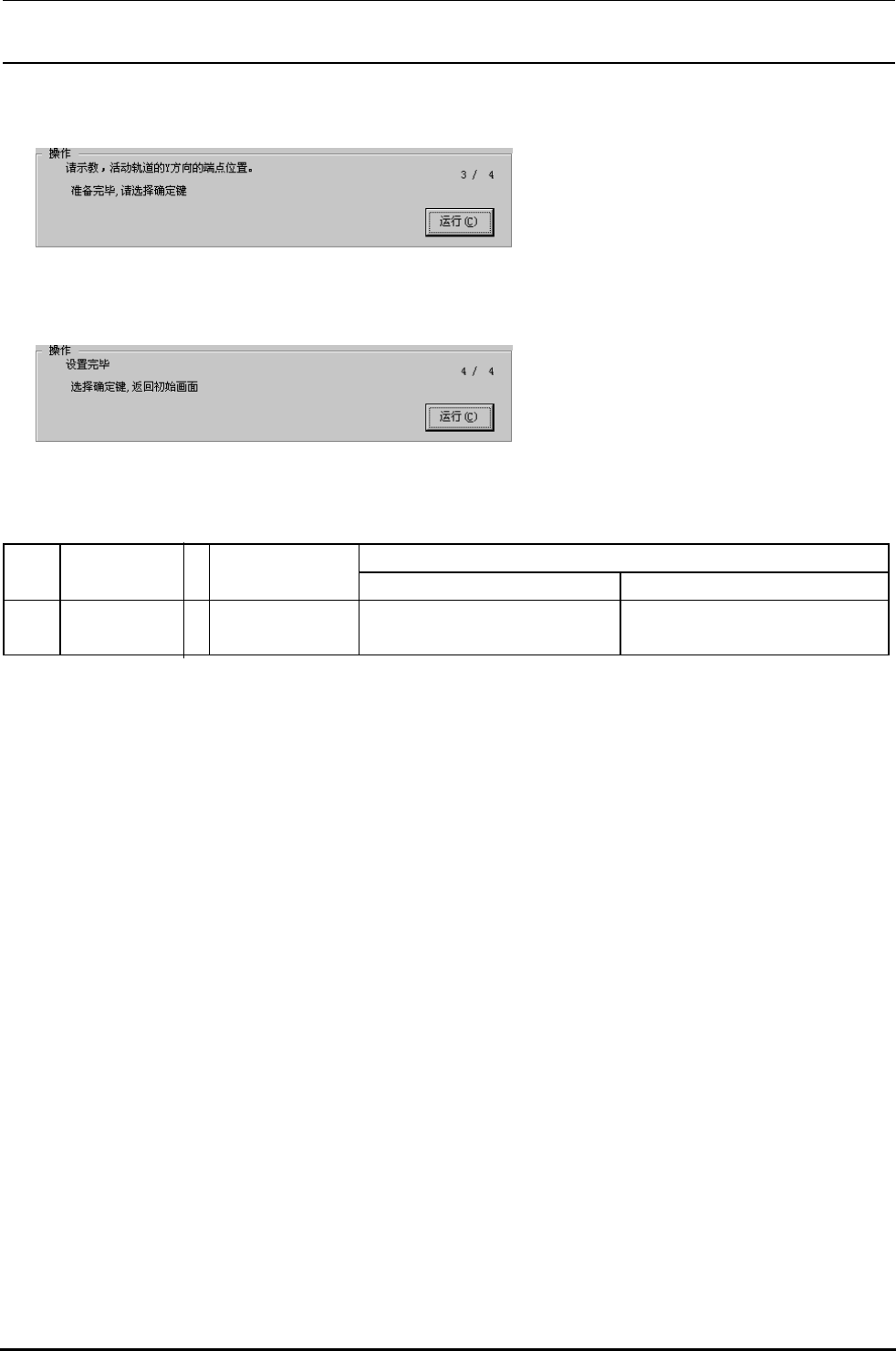
操作
通过演示,求基准轨道内侧的 坐标,然
后按 确定键
准备完毕,请选择确认
选择确认之后, 移动到可动轨上
MS 参数
操作
通过演示,求可动轨道内侧的 坐标,然
后按 的确定键
演示完毕,用求的 坐标计算新的偏差
值
准备完毕,选择确认
操作
设定完毕
选择了确认之后,返回到初期設置画面
允许值
MSP值不良时 No 项目 MSP允许值
异常点 调整(检查)项目
1 原点偏差值 ±3mm 原点复位动作不良
基板宽度自动调整设定不良
AWC马达的组装
(原点传感器和变换器位置
MS 参数
调整支撑台偏差
功能
为了支撑台正常动作,演示基板厚度 时的后备表的位置
使用治具
本设定不使用治具
操作
选择了偏差设定
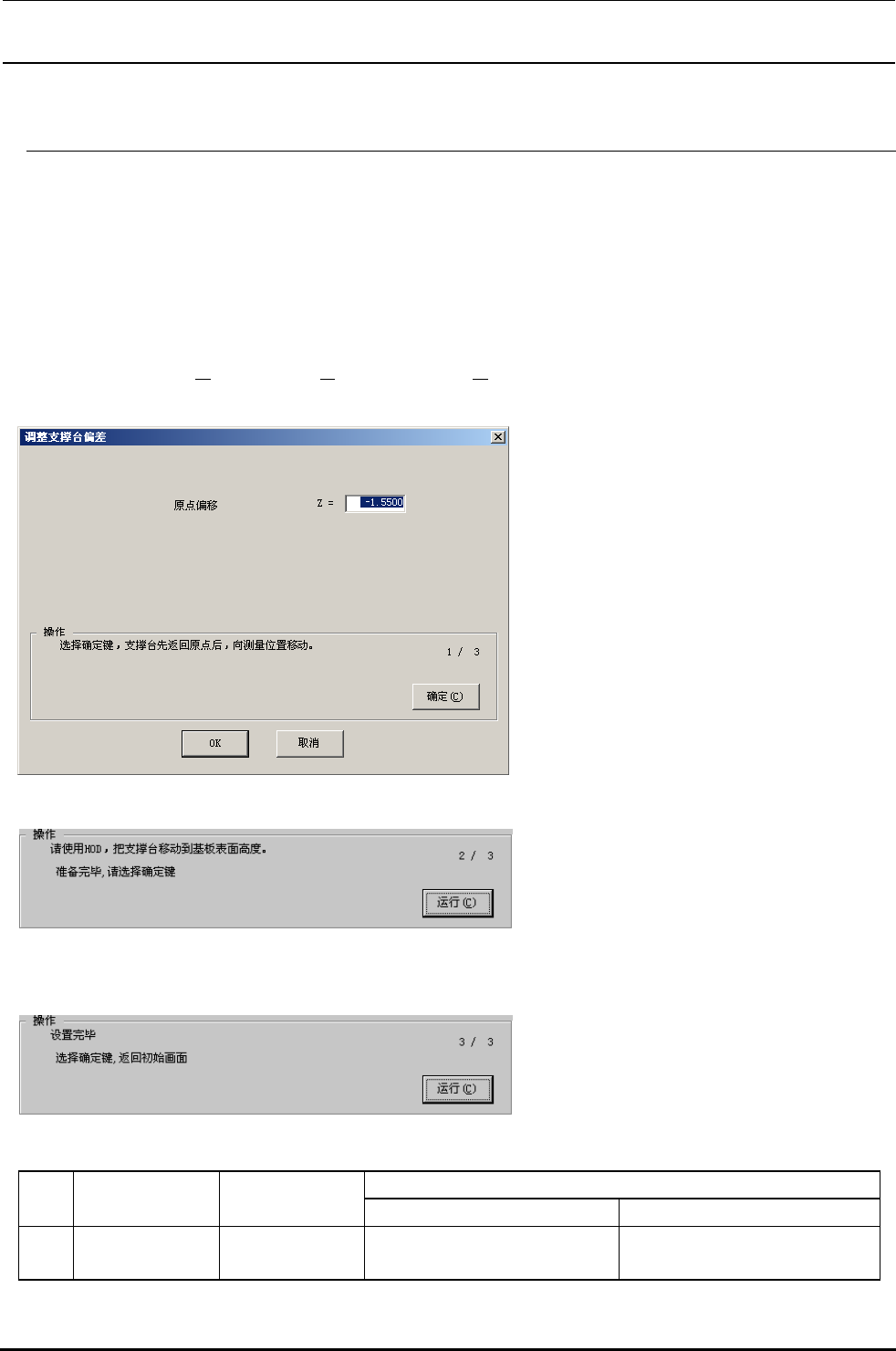
传送偏差 支撑台偏差之后,显示出下列支撑台偏差设定画面
操作
准备完毕,选择确认
选择确认之后,支撑台复位原点,移动到
测定位置
操作
通过演示,样支撑台上升,传送皮带在钳
夹用部件和接触的位置,按 的确定
键
准备完毕,请选择确认
操作
设定完毕
选择确认之后,返回初期設置画面
允许值
MSP值不良时 No 项目 MSP允许值
异常点 调整(检查)项目
1 原点偏差 ±1 2mm 原点复位动作不良
基板钳夹不良
支撑台的组装精度