KD-2077_MS参数.pdf - 第3页
MS 参数 目 录 1. 概要 ........................................................................................................................... 1- 1 定义 ......................................…
(1) 未经许可,严禁擅自复印、复制本书的部分或全部内容。(包括软件和程序)
(2) 本书的内容如有变更、恕不另行通告。
(3) 我们在编写本书内容时,力求准确无误。万一发现有错误、遗漏或可疑之处,请与所购买的销售
店或与本公司联系。
(4) 对于因错误操作所造成之结果,无论与第(3)项有关与否,本公司概不负责。敬请谅解。
(5) Windows 是美国 Microsoft Corporation 公司的注册商标。
本书中出现的其他公司名、产品名均为各公司的注册商标或商标。
注意事项

MS 参数
目 录
1. 概要........................................................................................................................... 1-1
定义 ..........................................................................................................................................
1-1
起动和退出 ............................................................................................................................... 1-1
构成 ..........................................................................................................................................
1-3
参数的保存地方 ...................................................................................................................
1-4
基本操作.................................................................................................................................
1-13
2. 控制菜单.................................................................................................................... 2-1
起动方法...................................................................................................................................
2-1
菜单内容...................................................................................................................................
2-1
轴移动 ..................................................................................................................................
2-2
任意坐标移动..........................................................................................................................
2-3
传送控制...................................................................................................................................
2-4
个别控制传送............................................................................................................................
2-5
照明图 ......................................................................................................................................
2-6
3. 初期設置.................................................................................................................... 3-1
机器规格...................................................................................................................................
3-1
原点粗调整 ............................................................................................................................... 3-2
附属装置(选项)
......................................................................................................................... 3-3
动作规格...................................................................................................................................
3-4
注释 ..........................................................................................................................................
3-9
4. 偏差设置.................................................................................................................... 4-1
偏差...................................................................................................................................
4-1
点胶头偏差 ............................................................................................................................... 4-6
传送偏差.................................................................................................................................
4-20
点胶综合偏差..........................................................................................................................
4-23
点胶头待机位置 ......................................................................................................................
4-24
5. 版本升级.................................................................................................................... 5-1
图像 ..........................................................................................................................................
5-1
............................................................................................................................................
5-2
........................................................................................................................................... 5-3
6. 程序的取消 ................................................................................................................ 6-1
............................................................................................................................................
6-1
........................................................................................................................................... 6-2
...........................................................................................................................................
6-3
7. 其它........................................................................................................................... 7-1
标记位置的编辑.................................................................................................................
7-1
MS 参数
1. 概要
定义
参数是记录机器组装情况的数据,是动作的基础 参数中,有有无附属品记录动作规格等的初
期設置、记录组装时与设计值的误差的偏差设定以及记录控制基板更换后基板动作用的软件变更记
录的版本升级的 个项目
偏差设定的例子
点胶头组装位置左端点胶头时
组装位置设计值 参数
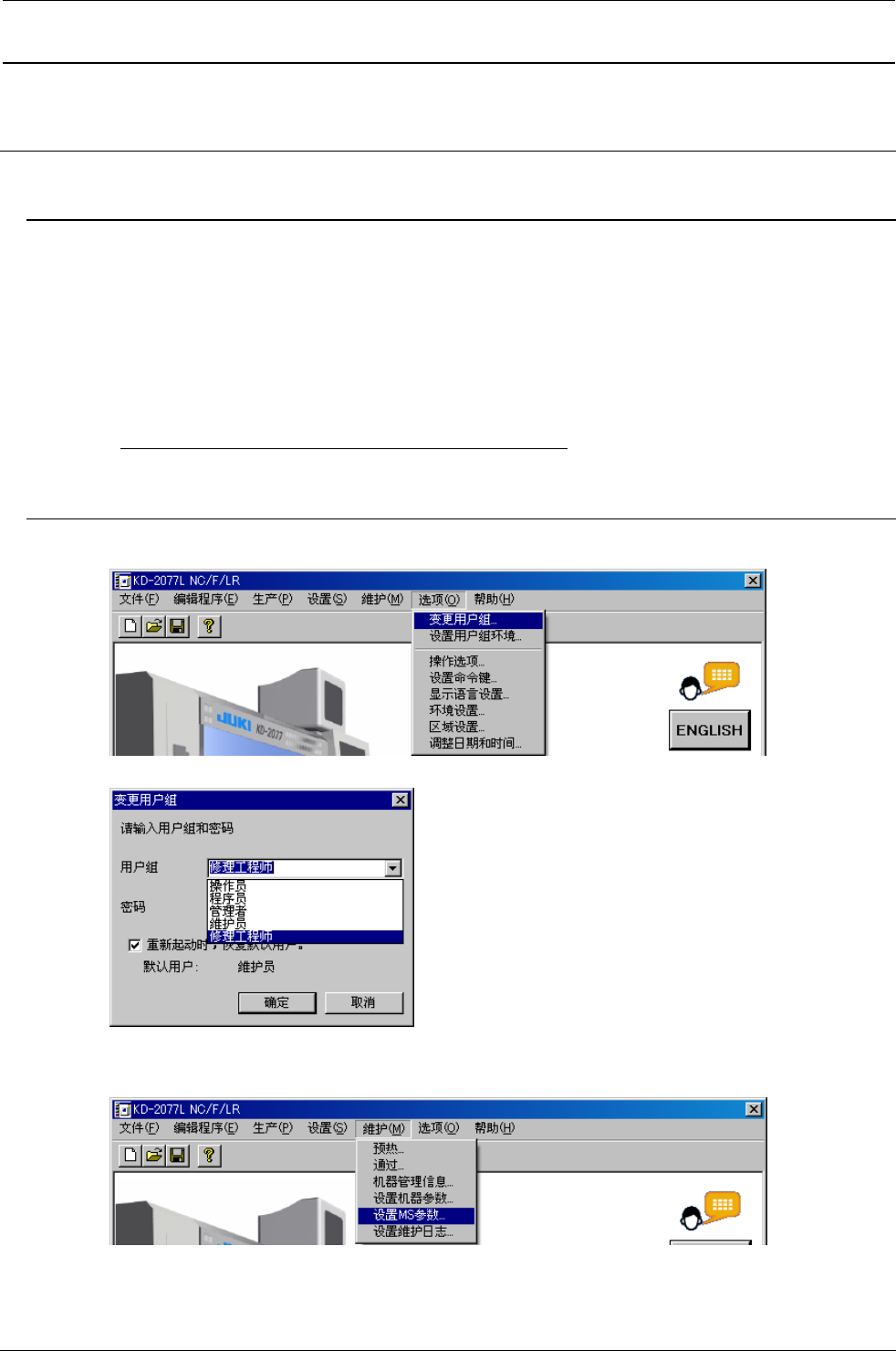
起动和退出
请把用户等级变更为修理工程师
选择维护设置 参数