KD-2077_MS参数.pdf - 第26页
MS 参数 动作规格 功能 设定各轴的动作和传送动作的详细规格 使用治具 本设定不使用治具 操作 选择了 初期設置 动作规格 之后,下…
MS 参数
附属装置(选项)
功能
设定为安装附属装置
使用治具
本设定不使用治具
操作
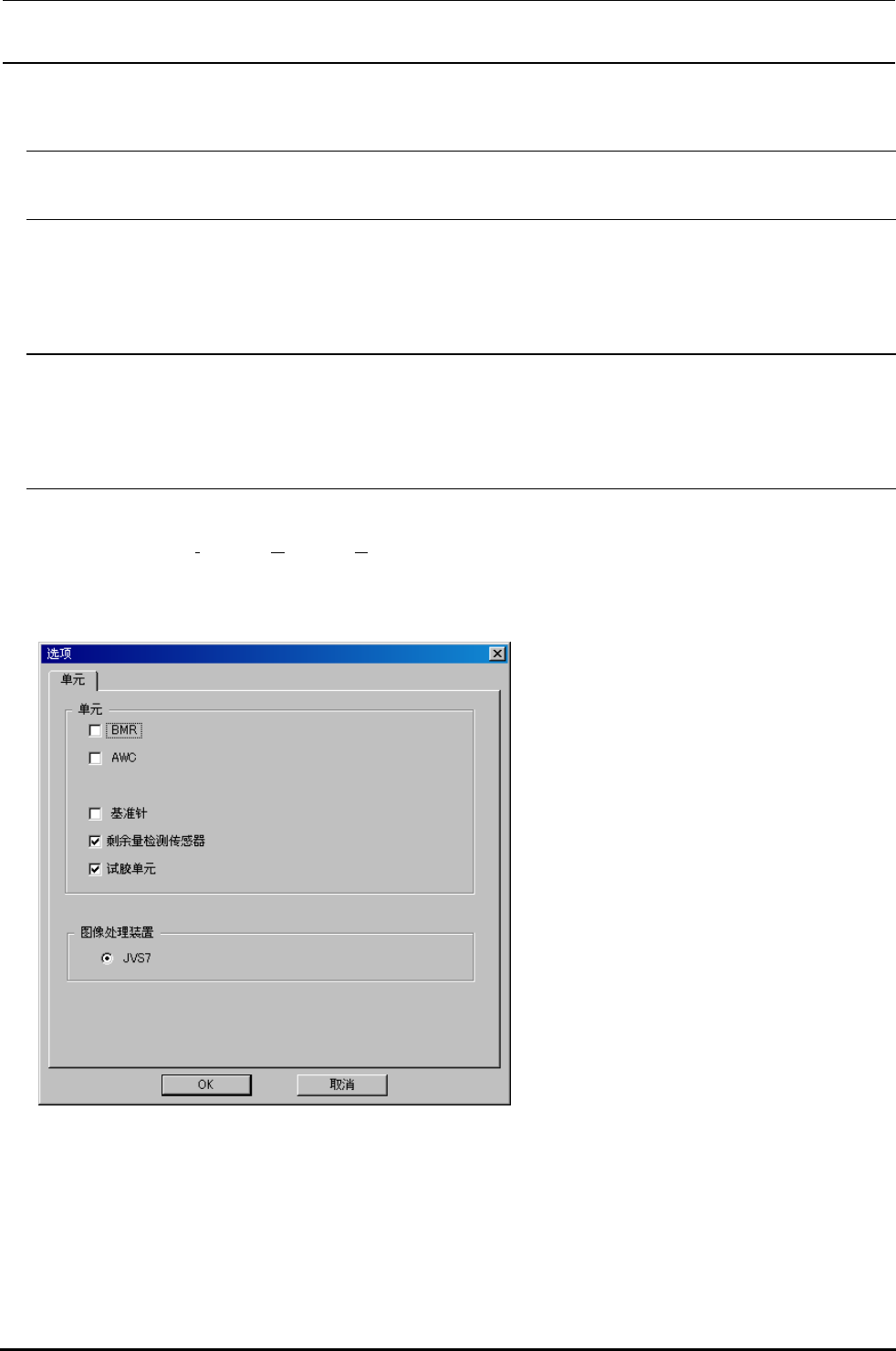
选择了初期設置
选项单元之后,下列选项设定画面显示出来
单元
把安装的单元变更为为安装之后,机器
设置的使用单元便自动变成不使用
追加单元等,从未安装变更为安装之后,
机器设置的使用单元自动地变成使
用
MS 参数
动作规格
功能
设定各轴的动作和传送动作的详细规格
使用治具
本设定不使用治具
操作
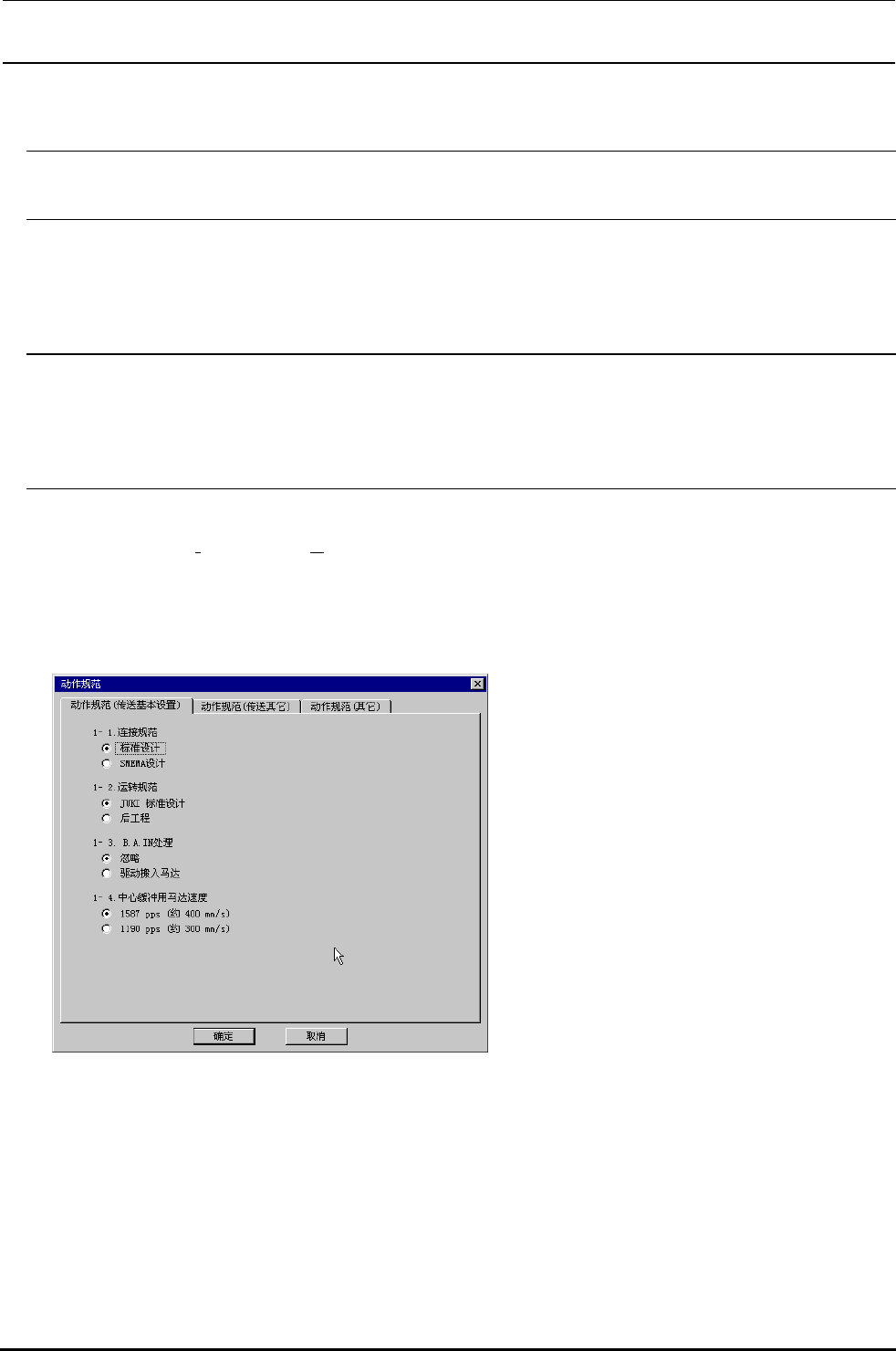
选择了初期設置
动作规格之后,下面的画面显示出来各项目请用黑点选择动作规范
动作规范传送基本设定
选择动作规范传送基本设置之后,左
面的画面显示出来。请用黑点选择动作规
范
MS 参数
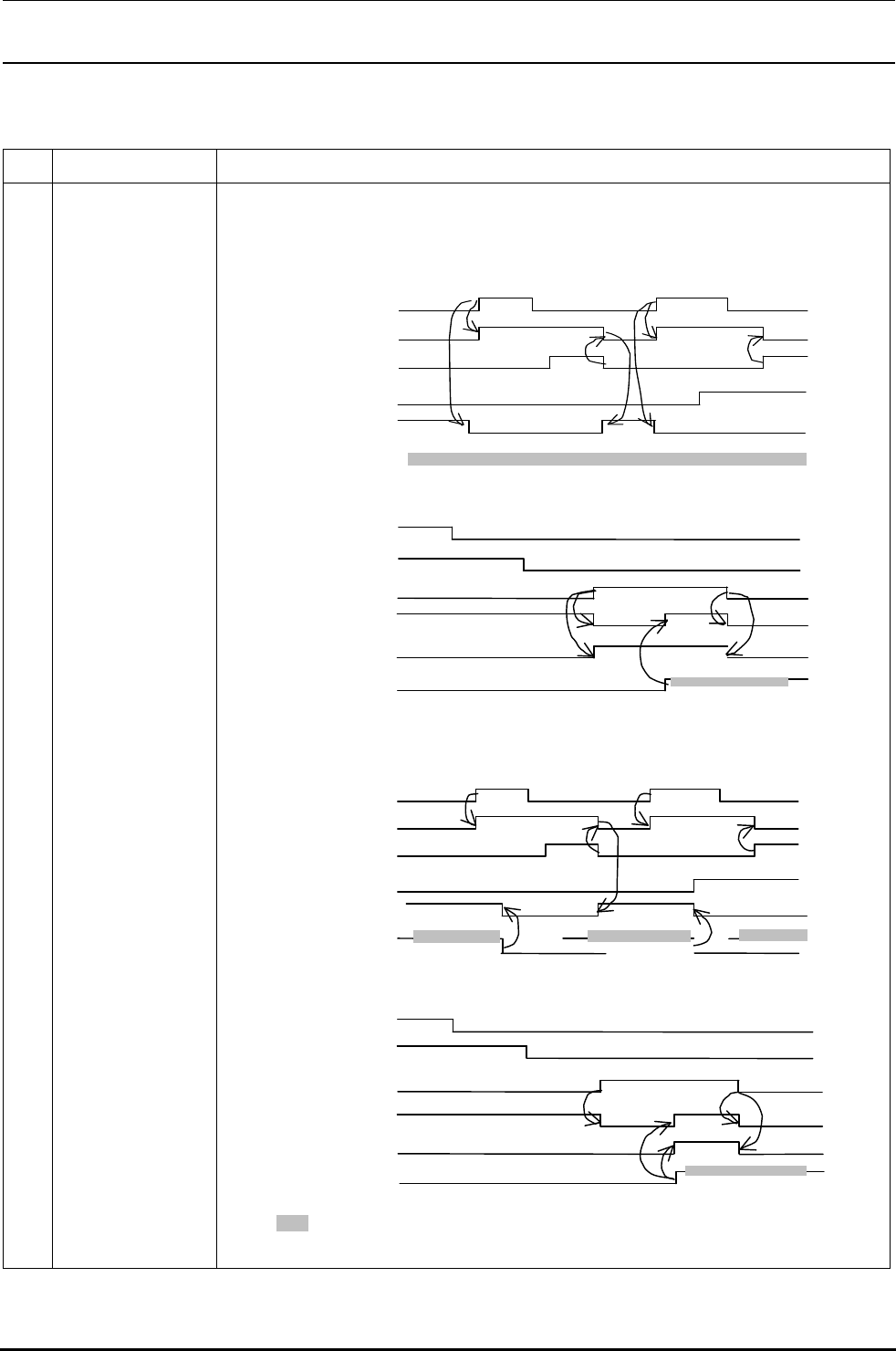
项目 设定内容
连接规格 连接规格
标准规格初期值
基板传送时间其它设定全部初期值
基板送出时间其它设定全部初期值
基板送入时间其它设定全部初期值
基板送出时间其它设定全部初期值
注部与状态无关
传感器
马达
传感器
传感器
STOP 传感器
传感器
传感器
马达
传感器
马达
传感器
传感器
STOP 传感器
传感器
传感器
马达