KD-2077_MS参数.pdf - 第29页
MS 参数 动作规范 传送其它 选择了动作规范(其它)之后,显示出下列的画面。用黑点选择动作规范。 项目 设定内容 的 时间 关闭 …
MS 参数
No
项目 设定的内容
2
1-2.
动作规格
动作规格
(
X
)
:JUKI标准规格 (初期值)
(
)
:后工序流程 *1
为了顺利连接回流传送带
OUT
马达低速(约通常的 1/2 速度)转动。
3
1-3.
B.A.IN 处理 检测板线处理
(
X
)
:不动作 (初期值)
(
)
:ON驱动IN马达
4
1-4.
中心缓冲马达速度 改变
IN
、中心、
OUT
马达的传送速度。
(
X
)
:1587pps (约400mm/s) (初期值)
(
)
:1190pps (约300mm/s)
注*1 不对应动作规格的后工序流程。
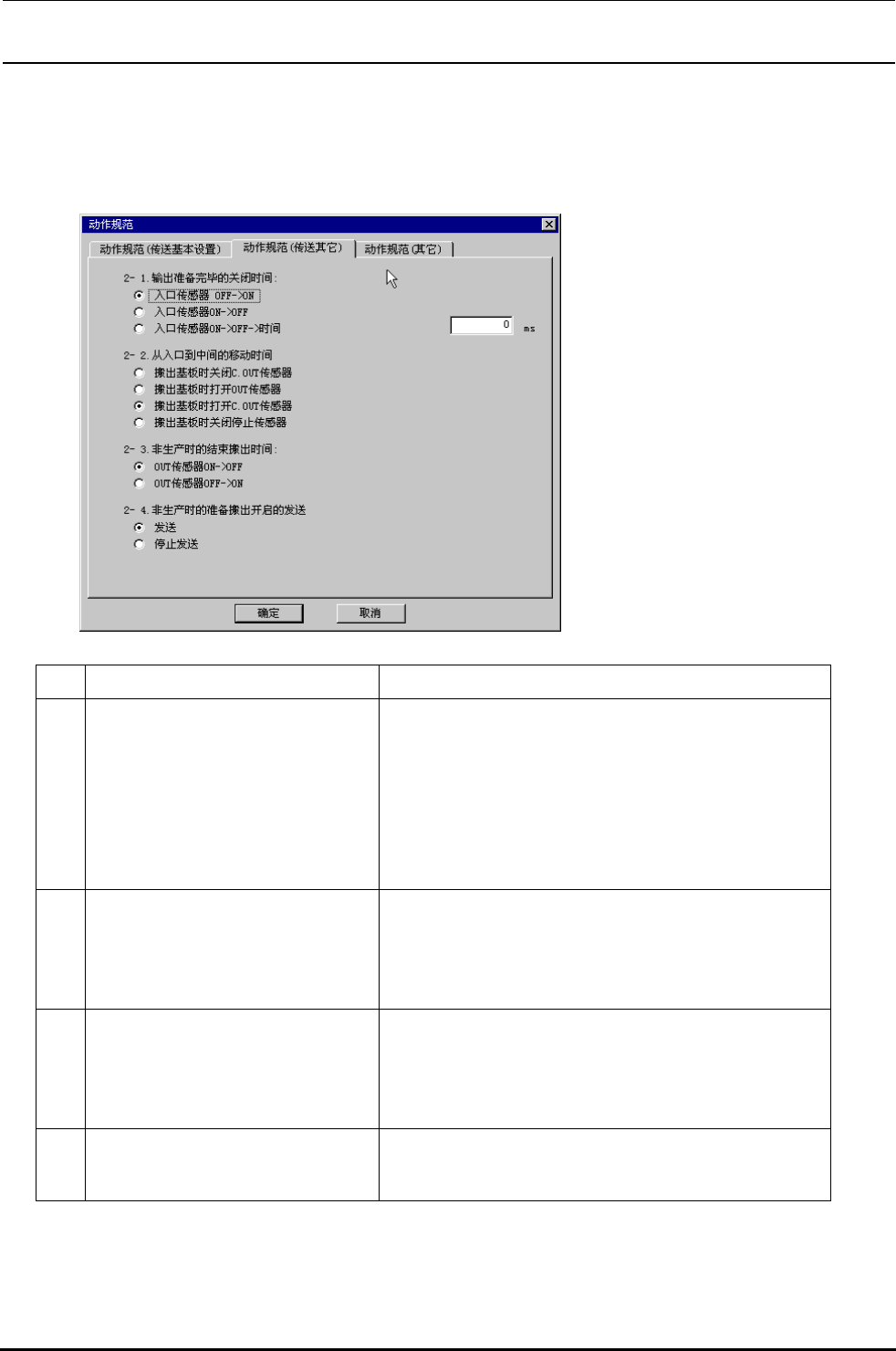
MS 参数
动作规范传送其它
选择了动作规范(其它)之后,显示出下列的画面。用黑点选择动作规范。
项目 设定内容
的 时间关闭时间
传感器 →
向 变化时初期值
传感器 →
向 变化时
传感器 →→定时器
向 变化后准备
定时器∶ 传感器 →→仅定时器时有限
缓冲到中心缓冲的送入时
间
缓冲到中心缓冲的送入时间
( ):基板送出时的 传感器
( ):基板送出时的 传感器
():基板送出时的 传感器 (初期值)
( ):基板送出时的 传感器
非生产时送出结束时间 非生产时的送出结束时间
(): 传感器 →
向 的变化时(初期值)
( ): 传感器 →
向 变化时
非生产时的 送
出
非生产时的 送出
送出初期值
不送出
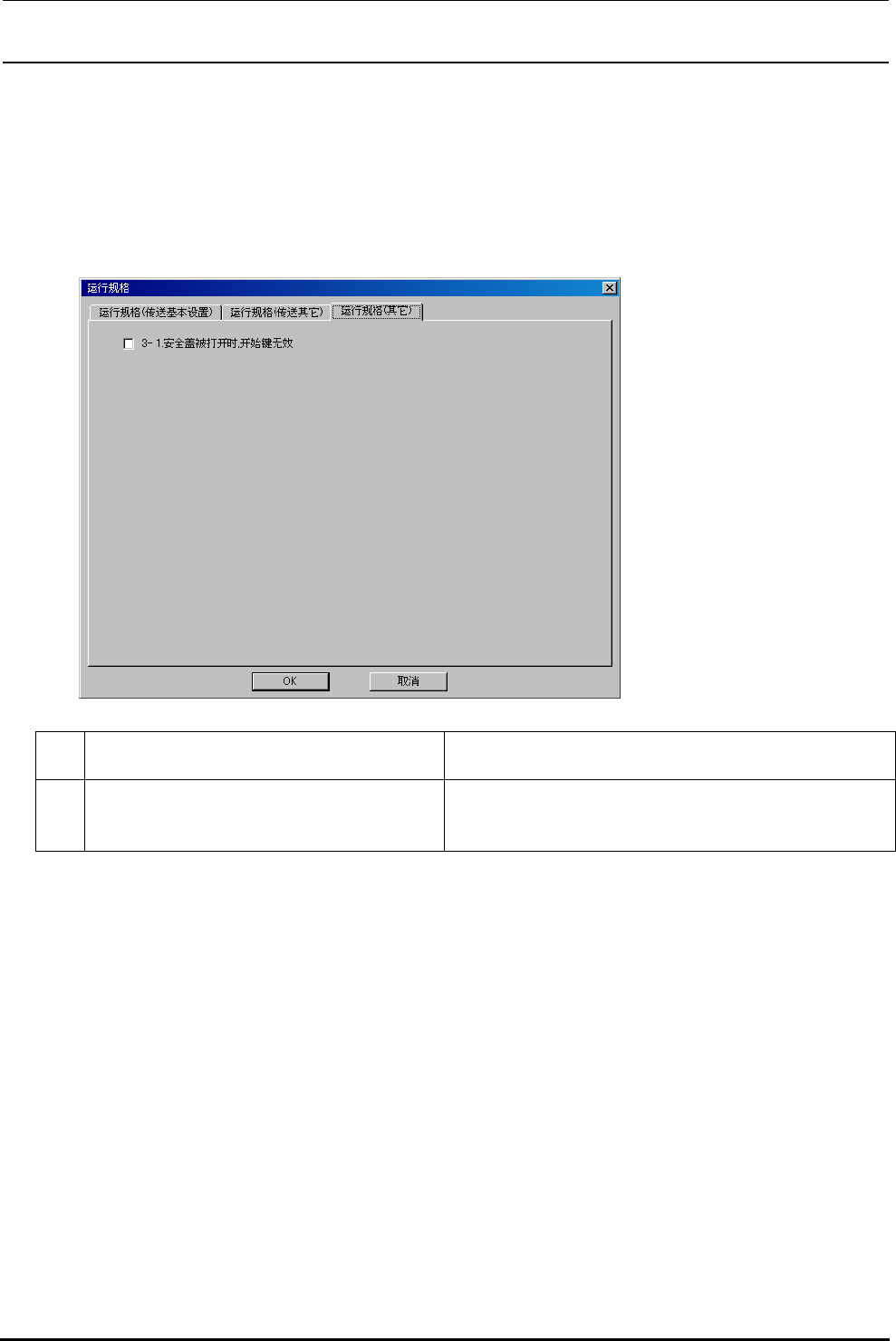
MS 参数
动作规范其它
选择动作规范等之后,显示出下面的画面
各项目请用勾选择动作规范
项目 设定内容
护罩打开时 开关无效 护罩打开时的 开关规格
有效初期值
无效