KD-2077_MS参数.pdf - 第36页
MS 参数 操作 准备完毕,请选择确认 选择了确认之后, 移动到组装角度测 定位置 操作 经演示,把监视器的十字游标调整到标志 的中心,按 的确认键 此时,摄像机视野内看见标记以外的尘埃 时,请把摄像机调节治具擦干净,只能清 楚地看到标记 测定…
MS 参数
操作
让下图的标记可以看得见
通过演示,把监视器十字游标调整到这
个标记的中央,按 的确定键
不需要调整时,则不需要演示
此时,在摄像机视野内如果看得到标记以
外的尘埃时,把摄像机调节治具擦干净,
以便能看得见标记
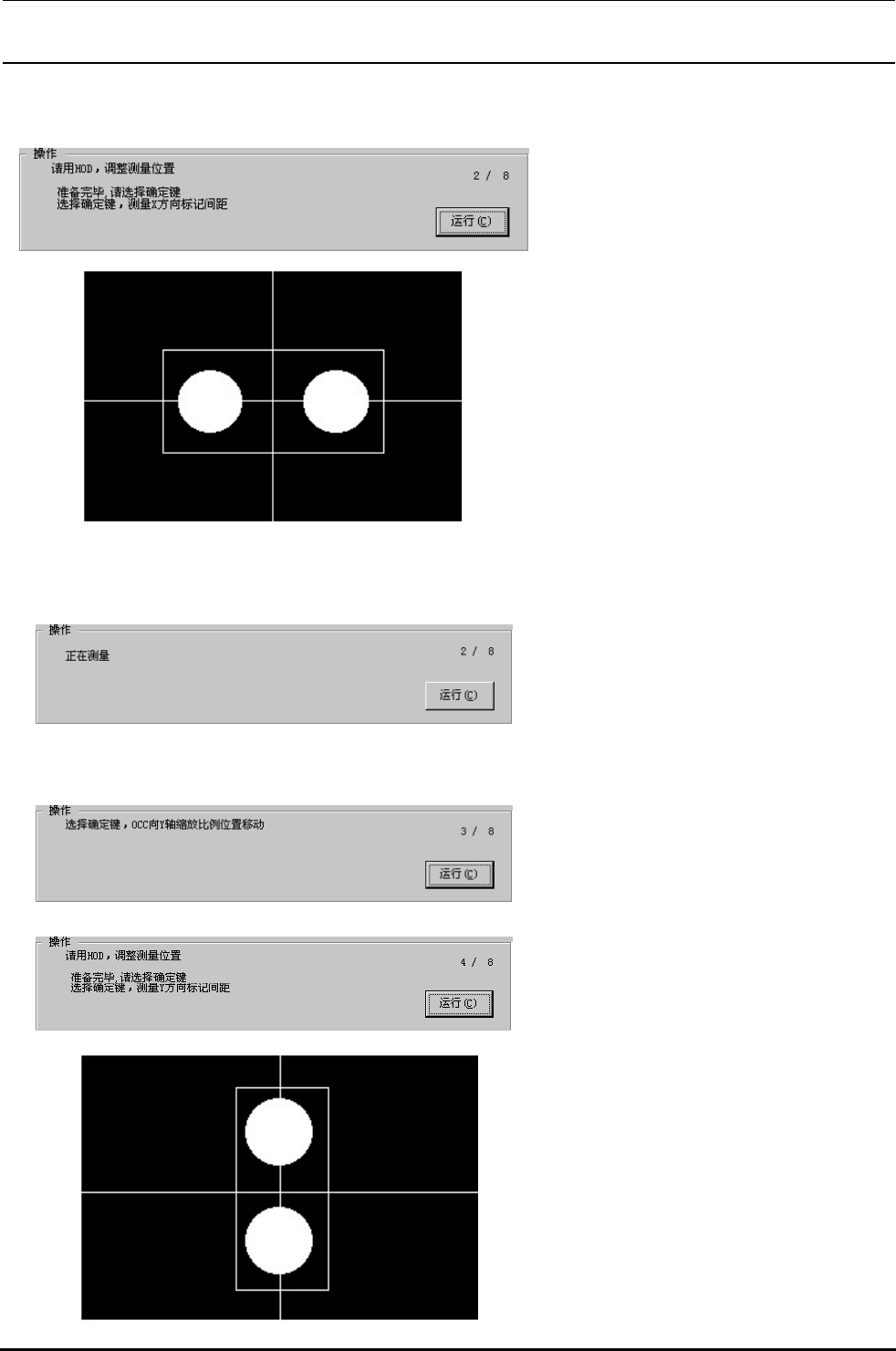
测定时,如果检测出标记以外的东西时,就不能获得正确的值,或成为异常选择确认之后,测定 方
向的标记间的距离。
结束测定之后,显示出测定结果,用输入
值和测定结果计算出新的 方向的缩放比
例
操作
准备完毕,请选择确认
选择了确认之后, 移动到 轴缩放比
例位置
操作
与 轴时相同,请调整测定位置
准备完毕,请选择确认
选择了确认之后,用 测定 方向的
标记间的距离
测定结束之后,测定结果被显示,用输入
值和测定结果计算出 方向的缩放值
MS 参数
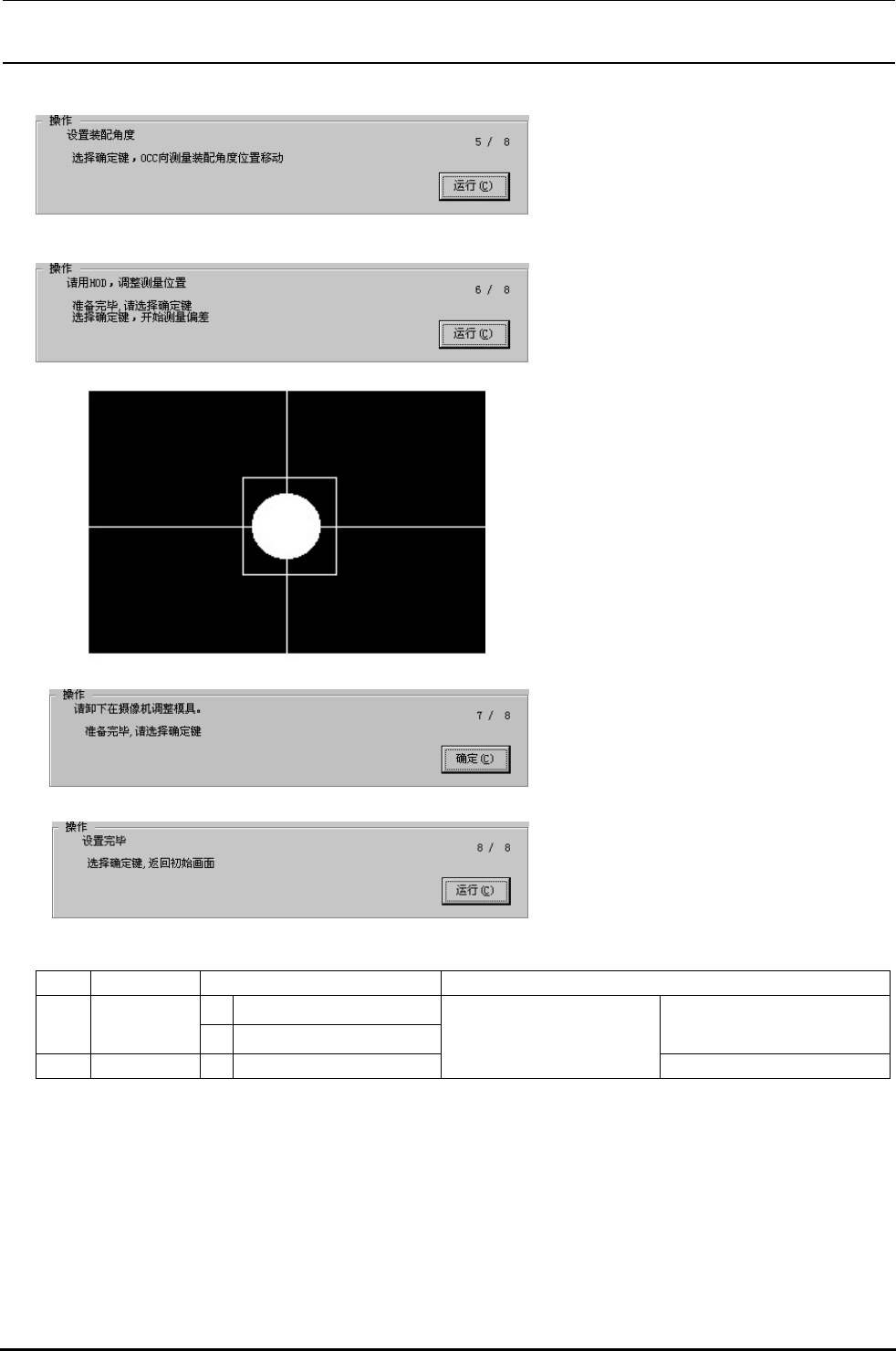
操作
准备完毕,请选择确认
选择了确认之后, 移动到组装角度测
定位置
操作
经演示,把监视器的十字游标调整到标志
的中心,按 的确认键
此时,摄像机视野内看见标记以外的尘埃
时,请把摄像机调节治具擦干净,只能清
楚地看到标记
测定时,如果检测出标记以外的东西的
化,就不能取得正确的值或发生异常
准备完毕,请选择确认
选择了确认之后,测定组装角度侧定结
束之后,用识别结果计算出新的组装角
度
操作
从试胶单元卸下摄像机调节治具准备完
毕,请选择确认
操作
设定结束
选择了确认之后,返回初期画面
允许值
项目允许度值不良时
± 缩放
±
主体
摄像机调节等
安装角度 ~ 度
OCC 摄像机的图像识别精
度不良造成各 值的
偏斜和贴装精度不良
装置的安装
MS 参数
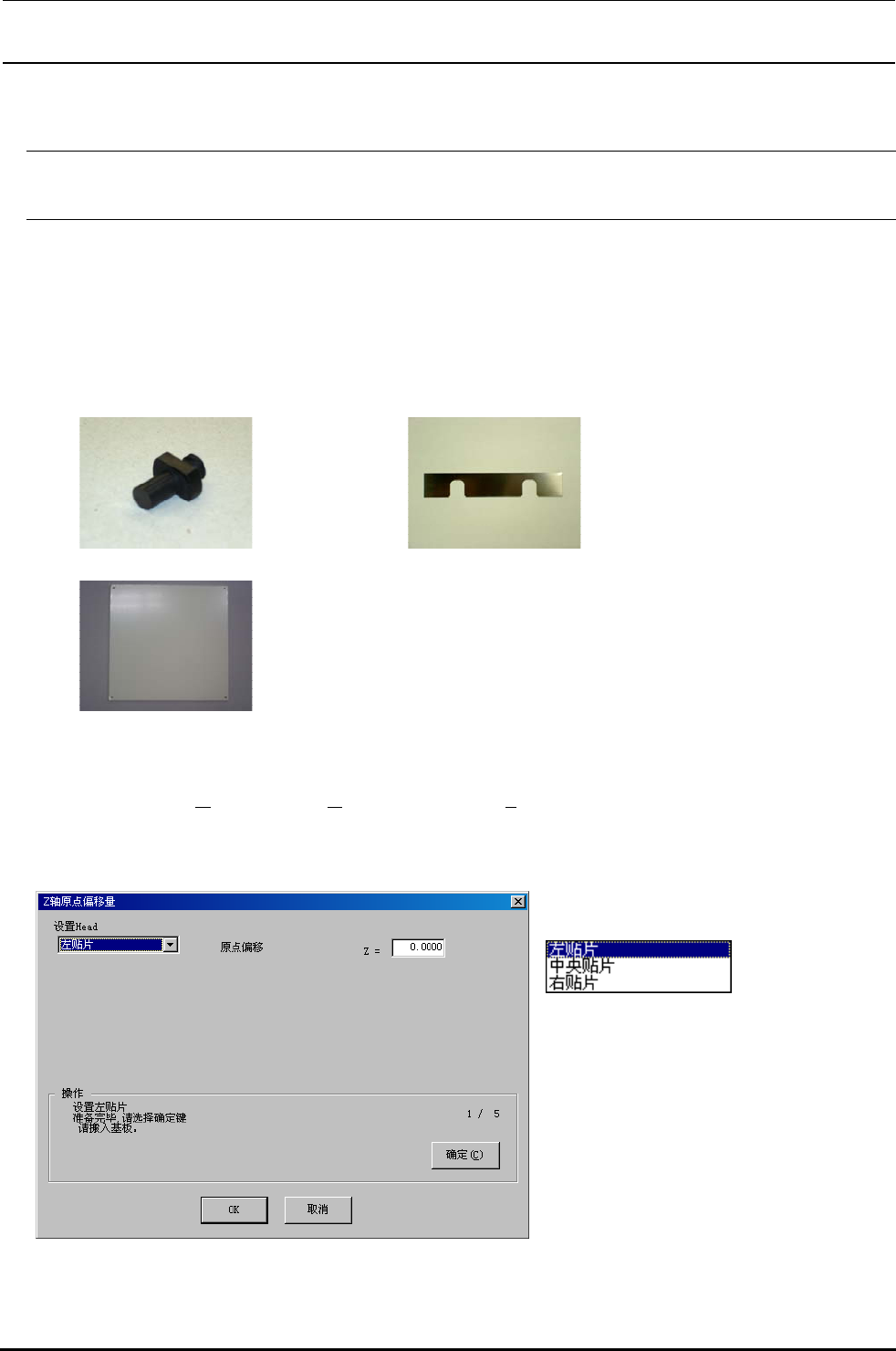
点胶头偏差
轴原点偏差
功能
测量各个点胶头的 轴方向上的设置值同组装位置之间的偏差。
使用治具
高治具吸嘴 μ垫片
治具 PWB
操作
选择了偏差设定
偏差 轴原点偏移量之后,显示出下面的 轴原点偏差设定画
面。
操作
按 ↓键,显示出下列一览。
请选择设定对象点胶头。
不影响机器设置的“使用装置”的设定。
没有检查(设定为不使用)装值也可以选
择。
请用控制菜单搬入基板。
(使用治具基板的时候用厚度为 的
然后请用加紧器固定。没有治具基板的时
候请选用弯曲比较少稍厚的基板。)