JM-20_MC机器控制参数.pdf - 第55页
机器控制参数 2- 46 2-2- 11 滚 珠 丝 杠 检查 参数 2-2- 11 -1 设定项目 No. 项目 输入范围 单位 备考 最小值 最大值 1 诊 断 前的识别等待 时间 0 65535 ms 2 诊断时的 识别等待 时间 0 65535 ms 3 诊断时的移动 距离 1/10000mm 4 诊断时 的判断 值 1/10000mm 5 第 1 次的 诊断时机 0 65535 km 6 第 2 次的 诊断时机 0 65535…
机器控制参数
2-45
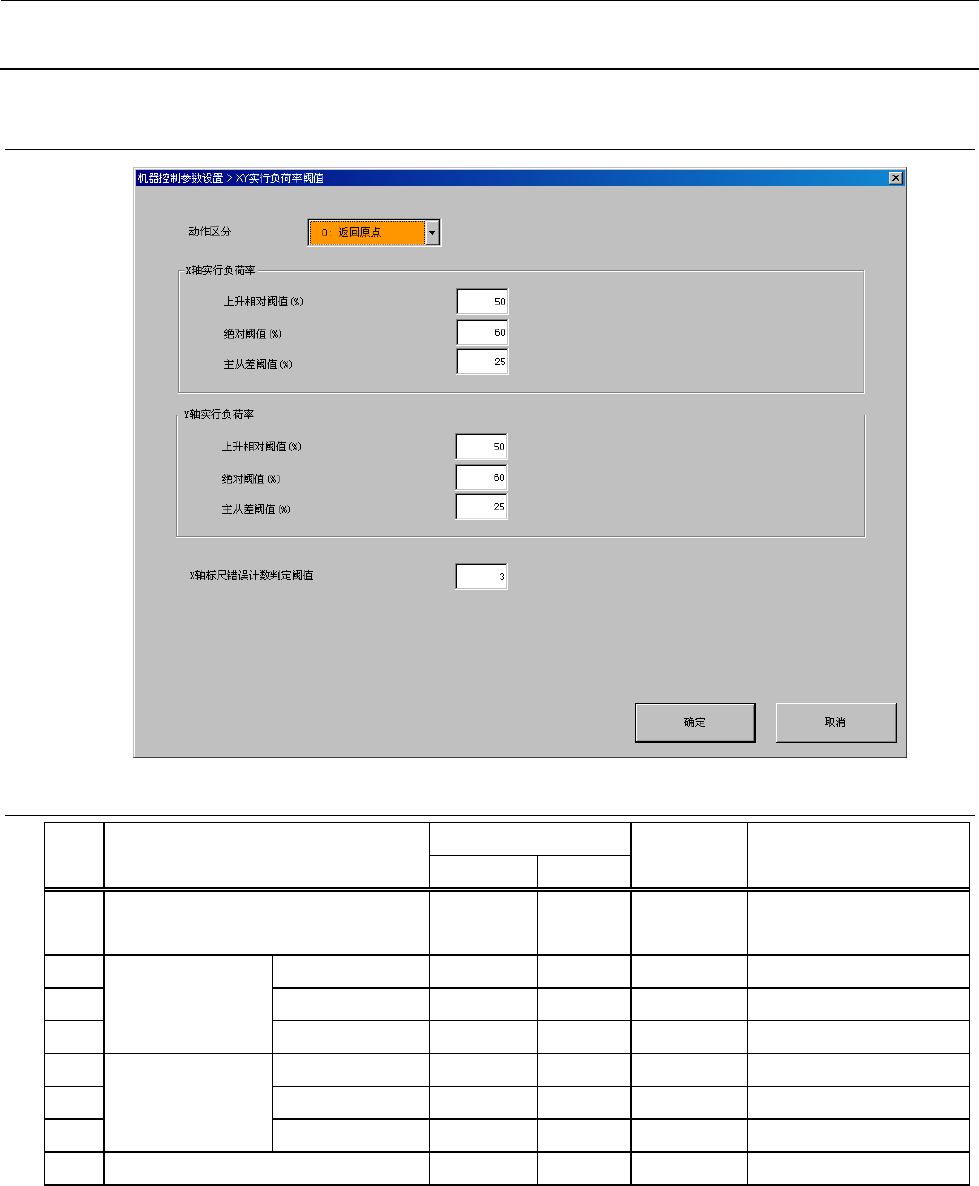
2-2-10 XY 轴有效负载率阈值
2-2-10-1 设定项目
No.
项目
输入范围
单位
备考
最小值
最大值
1 动作区分 0 1
0:返回原点
1:生产
2 X轴有效负载率 上升相对阈值 %
3 绝对阈值 %
4 主从差阈值 %
5 Y轴有效负载率 上升相对阈值 %
6 绝对阈值 %
7 主从差阈值 %
8 X轴标尺错误计数判定阈值
机器控制参数
2-46
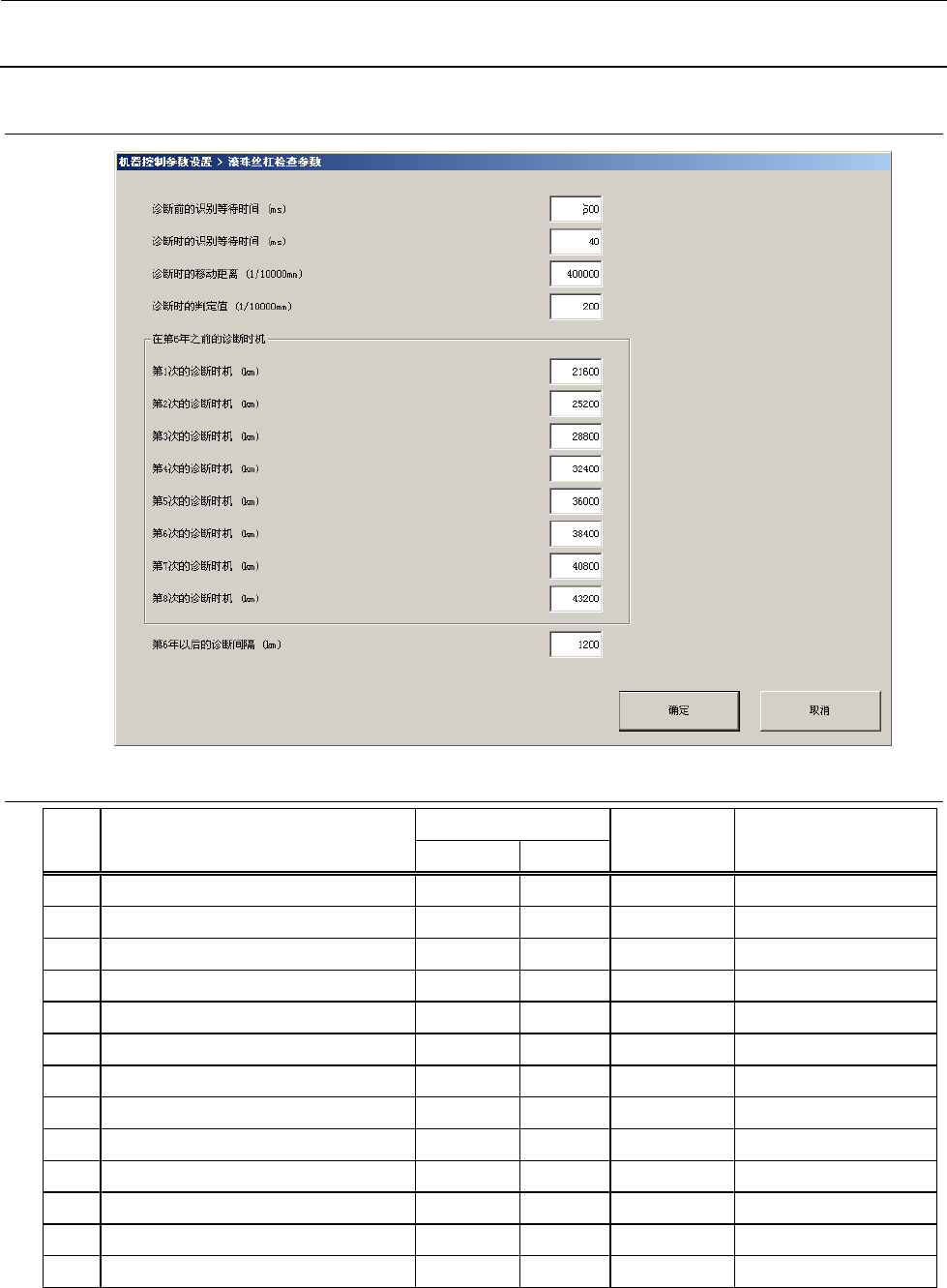
2-2-11 滚珠丝杠检查参数
2-2-11-1 设定项目
No.
项目
输入范围
单位
备考
最小值
最大值
1 诊断前的识别等待时间 0 65535 ms
2 诊断时的识别等待时间 0 65535 ms
3 诊断时的移动距离 1/10000mm
4 诊断时的判断值 1/10000mm
5 第1次的诊断时机 0 65535 km
6 第2次的诊断时机 0 65535 km
7 第3次的诊断时机 0 65535 km
8 第4次的诊断时机 0 65535 km
9 第5次的诊断时机 0 65535 km
10 第6次的诊断时机 0 65535 km
11 第7次的诊断时机 0 65535 km
12 第8次的诊断时机 0 65535 km
13 第6年以后的诊断间隔 0 65535 km
机器控制参数
2-47
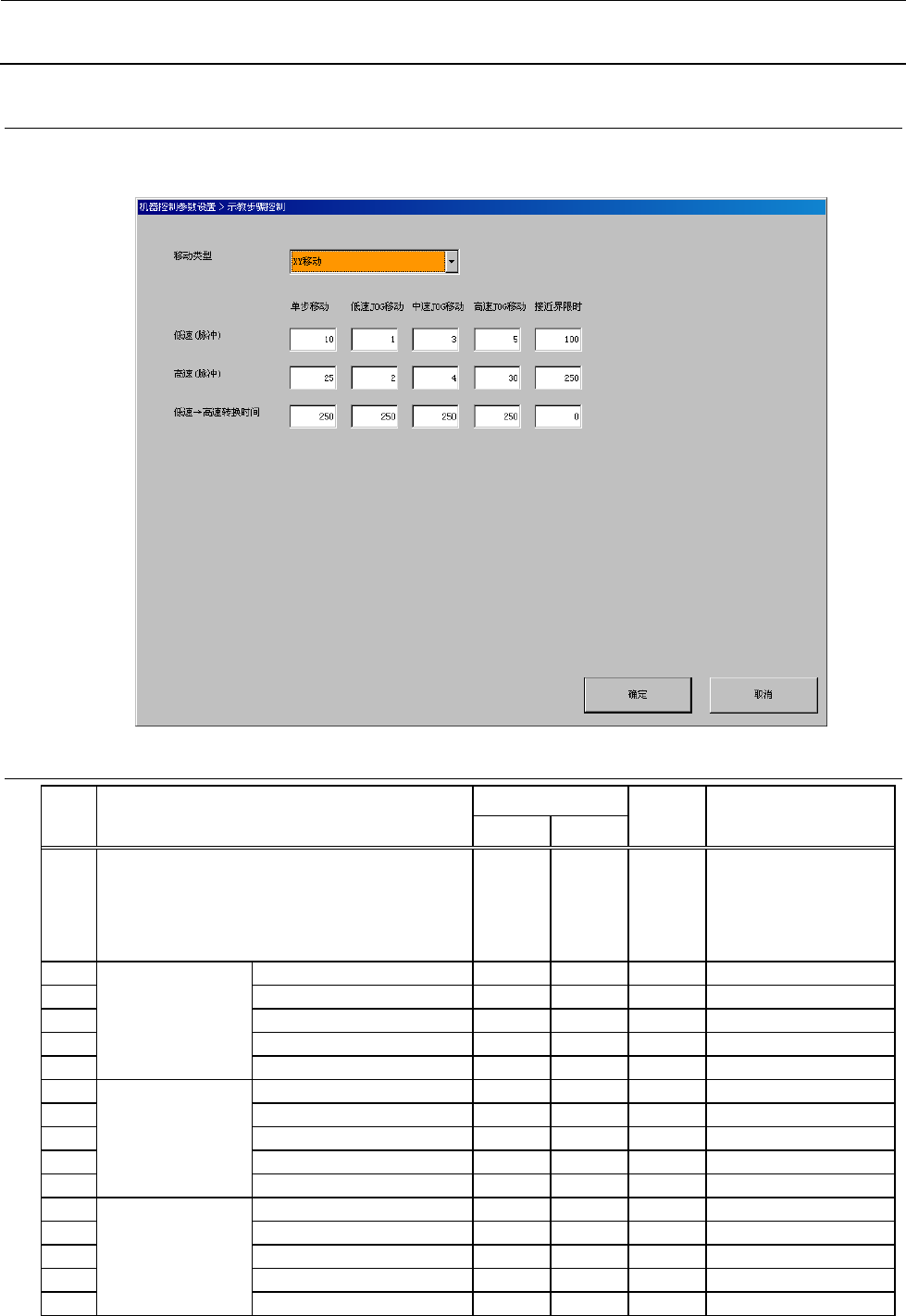
2-2-12 示教步骤控制
接近界限时的[低速(脉冲)]、[高速(脉冲)]、[低速→高速转换时间]仅在选择XY移动时使
用。
2-2-12-1 设定项目
No.
项目
输入范围
单位
备考
最小值
最大值
1
移动类型
XY移动
Z移动
θ移动
支撑台移动
AWC移动
2
低速(脉冲)
单步移动
3 低速JOG移动
4 中速JOG移动
5
高速JOG移动
6
接近界限时
仅XY移动时使用
7 高速(脉冲) 单步移动
8 低速JOG移动
9
中速JOG移动
10
高速JOG移动
11 接近界限时 仅XY移动时使用
12 低速→高速转换
时间
单步移动
13
低速JOG移动
14
中速JOG移动
15 高速JOG移动
16 接近界限时 仅XY移动时使用