JM-20_MC机器控制参数.pdf - 第6页
机器控制参数 1-2 1-2 菜单构成 表 1-2- 1 机器控 制参数 设定项目( 1/ 3 ) No. 主菜单 子菜单 设 定内容 1 文件 打开 读取现 在保存的数据文 件。 2 保存 把编辑的内容重 写到文件上。 [ 保存 ] 仅 在写入了文件 时 有效。 3 另存为 起新名称把编辑 的内容保存到文 件中。 4 读内存 读 取共用存 储 器内的机械控制参数。本 实 用 软件 启动 时,自动地读 取共用存 储器内的机械 控制参数。…
机器控制参数
1-1
1
概要
1-1
操作概要
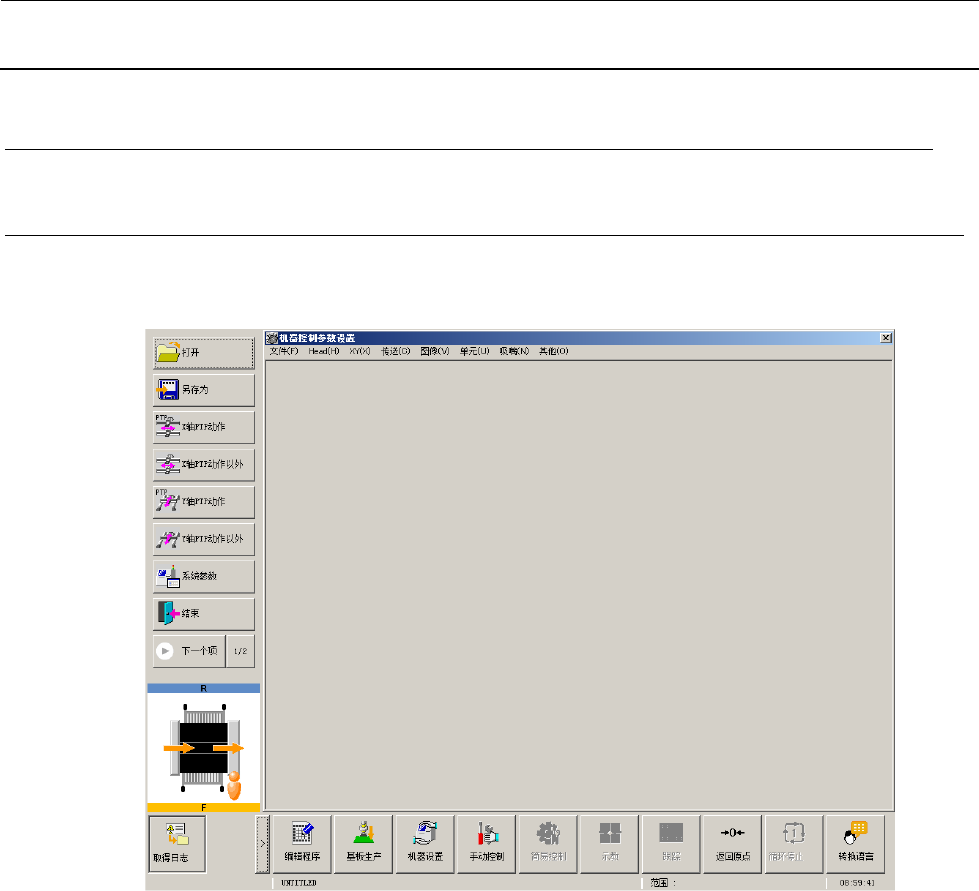
从菜单条的[维修]选择[机器控制参数设置]之后,就可以显示出图1-1-1所示的机器控制参数初期
画面。
图1-1-1 机器控制参数初期画面
① 启动时,读取共用存储器内的机械控制参数,在各设定画面进行显示。
② 更新了数据之后,共用存储器可以保存文件。
③ 文件输出形式是二进制形式
。(文件名、文件种类可以任意地指定。)
机器控制参数
1-2
1-2
菜单构成
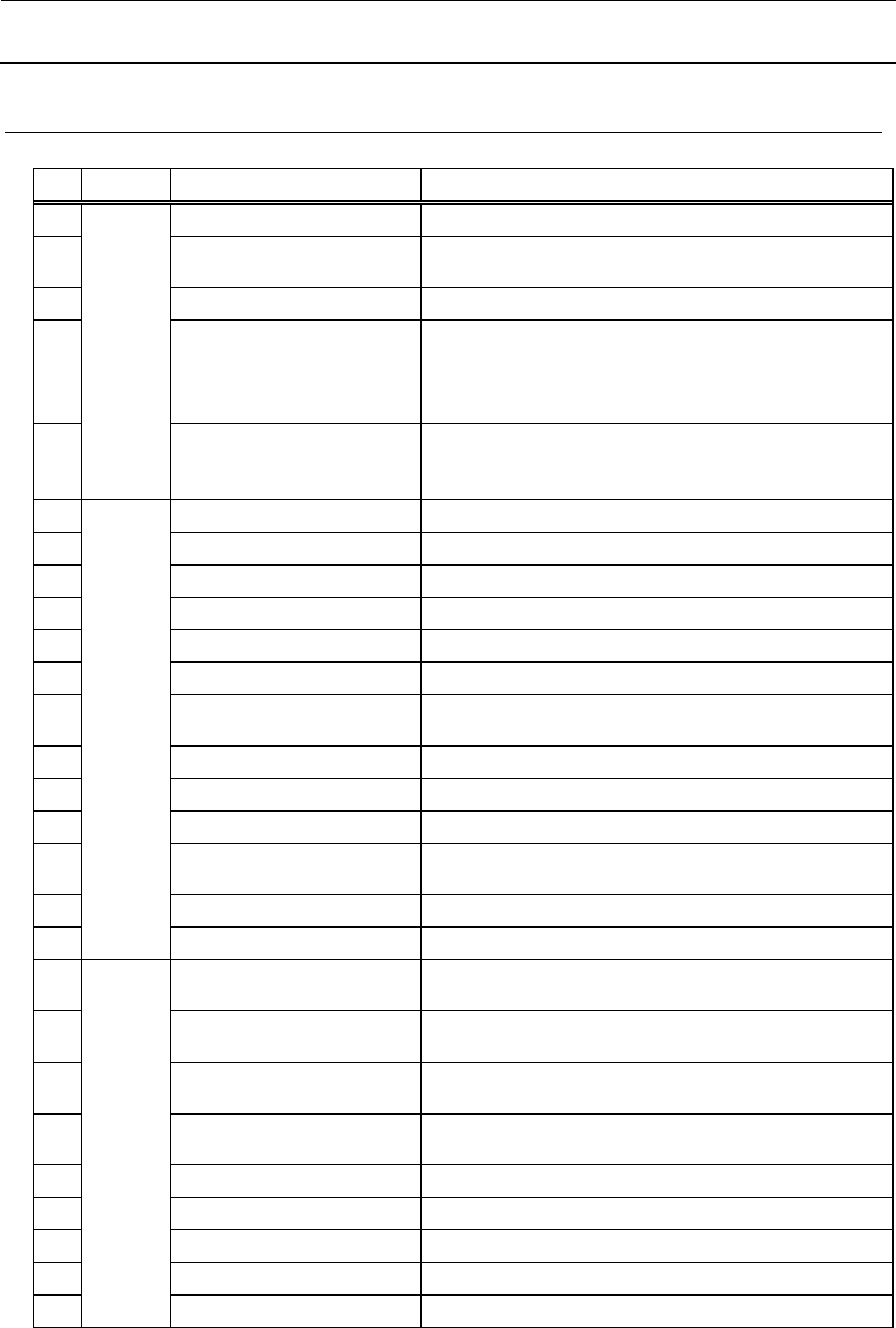
表 1-2-1 机器控制参数设定项目(1/3)
No.
主菜单 子菜单 设定内容
1
文件
打开 读取现在保存的数据文件。
2
保存
把编辑的内容重写到文件上。
[
保存
]
仅在写入了文件时有效。
3
另存为 起新名称把编辑的内容保存到文件中。
4
读内存
读取共用存储器内的机械控制参数。本实用软件启动
时,自动地读取共用存储器内的机械控制参数。
5
写内存
编辑的内容写入到共用存储器里。
[
写内存
]
仅在编辑数
据变更时有效。
6
退出
结束机械控制参数的数据编辑。编辑数据变更时,确 认
保存。
另外,选择指令按键的
[
退出
]
也可以结束实用软件。
7
Head
L-Head Z 轴 PTP 动作 进行 L-Head Z 轴的 PTP 动作的速度比的设定。
8
L-Head Z 轴 PTP 动作以外 进行 L-Head Z 轴的 PTP 以外的动作速度比的设定。
9
L-Head θ 轴 PTP 动作 进行 L-Head θ 轴的 PTP 动作速度比的设定。
10
L-Head θ 轴 PTP 动作以外 进行 L-Head θ 轴的 PTP 以外的动作速度比的设定。
11
真空校准 进行真空校准的设定。
12
真空时间 进行对于各种元件的各种真空同步时间的设定。
13
真空时间转换表
对于各元件的适用最大元件尺寸和各种元件真空同步
时间表的目录的设定。
14
设置真空泵校准 进行真空泵校准的设置。
15
过滤器弄脏判定值 进行过滤不良判断值的设置。
16
Z 轴高度控制 进行与 Z 轴的高度相关的设定。
17
校正控制参数
进行校正控制参数(吸取位置自动校正、吸嘴旋转中心
校正)的设定。
18
元件插入异常检测 进行与插入异常检测相关的设定。
19 过載的檢測设置 進行判定过載的閾值的设置。
20
XY
X 轴 PTP 动作
进行
X
轴的
PTP
动作的轴控制参数和移动结束触发器
的设定。
21 X 轴 PTP 动作以外
进行
X
轴的
PTP
以外的动作的轴控制参数和结束触发
器的设定。
22 Y 轴 PTP 动作
进行
Y
轴的
PTP
动作的轴控制参数和移动结束触发器
的设定。
23 Y 轴 PTP 动作以外
进行
Y
轴的
PTP
以外的动作的轴控制参数和结束触发
器的设定。
24 系统参数 进行定位板系统参数的设置。
25 伺服参数 进行伺服参数的设置。
26 控制参数 进行控制参数的设置。
27 XY 轴增益转换表 进行 X 轴及 Y 轴的增益转换表的设定。
28 Zθ 轴增益转换表 进行 Z 轴及 θ 轴的增益转换表的设定。

机器控制参数
1-3
29 XY 轴有效负载率阈值 进行 X 轴及 Y 轴的有效负载率的设定。