JM-20_MC机器控制参数.pdf - 第97页
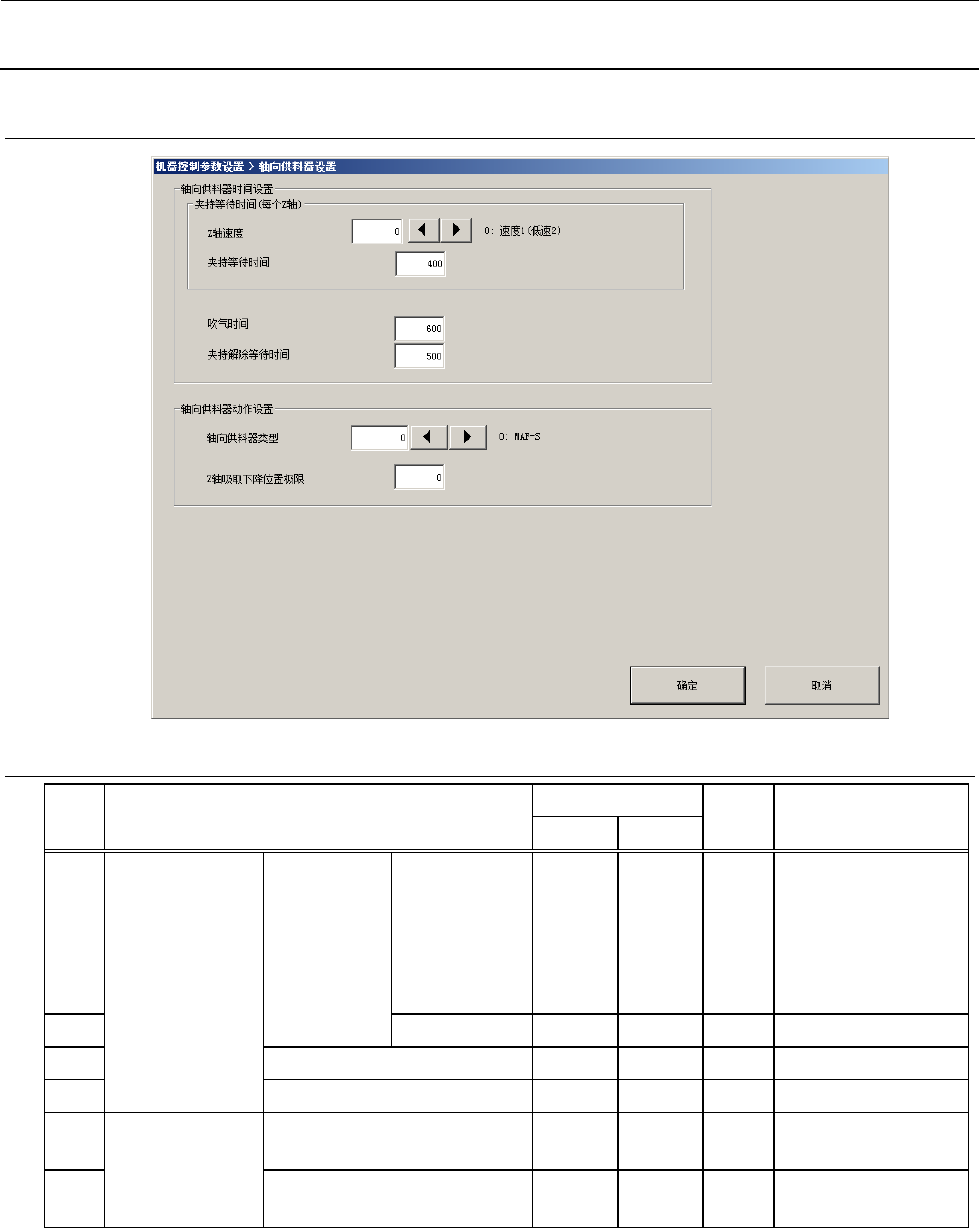
机器控制参数 2- 88 2-5-8 轴向供料器设置 2-5-8-1 设定项目 No. 项目 输入范围 单位 备考 最小值 最大值 1 轴向供料器时间 设置 夹持等待时 间 (每个 Z 轴 ) Z 轴速度 0 9 0 :速度 1 (低 速 2 ) 2 :速度 3 (低 速) 5 :速度 6 (中 速) 7 :速度 8 (高 速) 9 :速度 10 ( 高速 2 ) 其他: 预备 2 夹持等待时间 每隔 Z 轴速度设定 3 吹气时间 4 …
机器控制参数
2-87
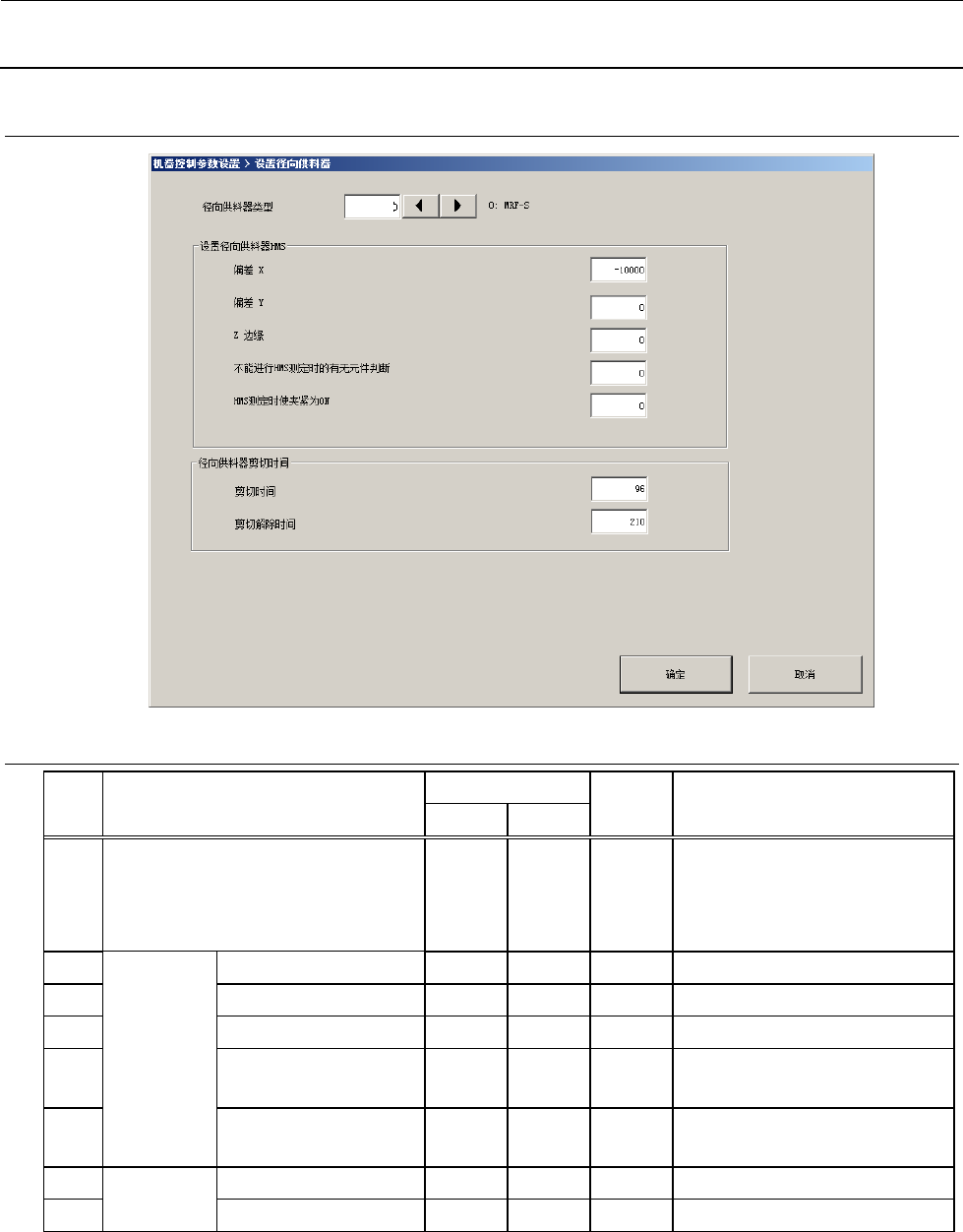
2-5-7 设置径向供料器
2-5-7-1 设定项目
No.
项目
输入范围
单位
备考
最小值
最大值
1 径向供料器类型 0 5
0:MRF-S
1:MRF-LC
2:MRF-L
3~5:预备
2 设置径向供
料器HMS
偏移
X
3 偏移 Y
4 Z边缘
5
不能进行HMS测定时
的有无元件判断
6
HMS测定时使夹緊为
ON
7
径向供料器
剪切时间
剪切时间
8 剪切解除时间
这些参数是在通过HMS判断径向供料器有无元件时有效的参数。
偏移量X、偏移量Y对HMS的移动处(元件吸取XY坐标)有效。
偏移量Z对判定有无元件有效。
有元件的判定为如下所示。
HMS的测定值 ≥ 吸取高度(Z示教高度)-封装高度+Z余量
无元件的判定为如下所示。
HMS的测定值 < 吸取高度(Z示教高度)-封装高度+Z余量
*封装高度=元件高度-引脚长度
机器控制参数
2-88
2-5-8 轴向供料器设置
2-5-8-1 设定项目
No.
项目
输入范围
单位
备考
最小值
最大值
1
轴向供料器时间
设置
夹持等待时
间(每个Z轴
)
Z轴速度
0
9
0:速度1(低速2)
2:速度3(低速)
5:速度6(中速)
7:速度8(高速)
9:速度10(高速2)
其他:预备
2
夹持等待时间
每隔Z轴速度设定
3
吹气时间
4
夹持解除等待时间
5
轴向供料器动作
设置
轴向供料器类型
0
5
0:MAF-S 1:
MAF-L
其他:预备
6
Z轴吸取下降位置扱限
每隔轴向供料器类型
设定
机器控制参数
2-89
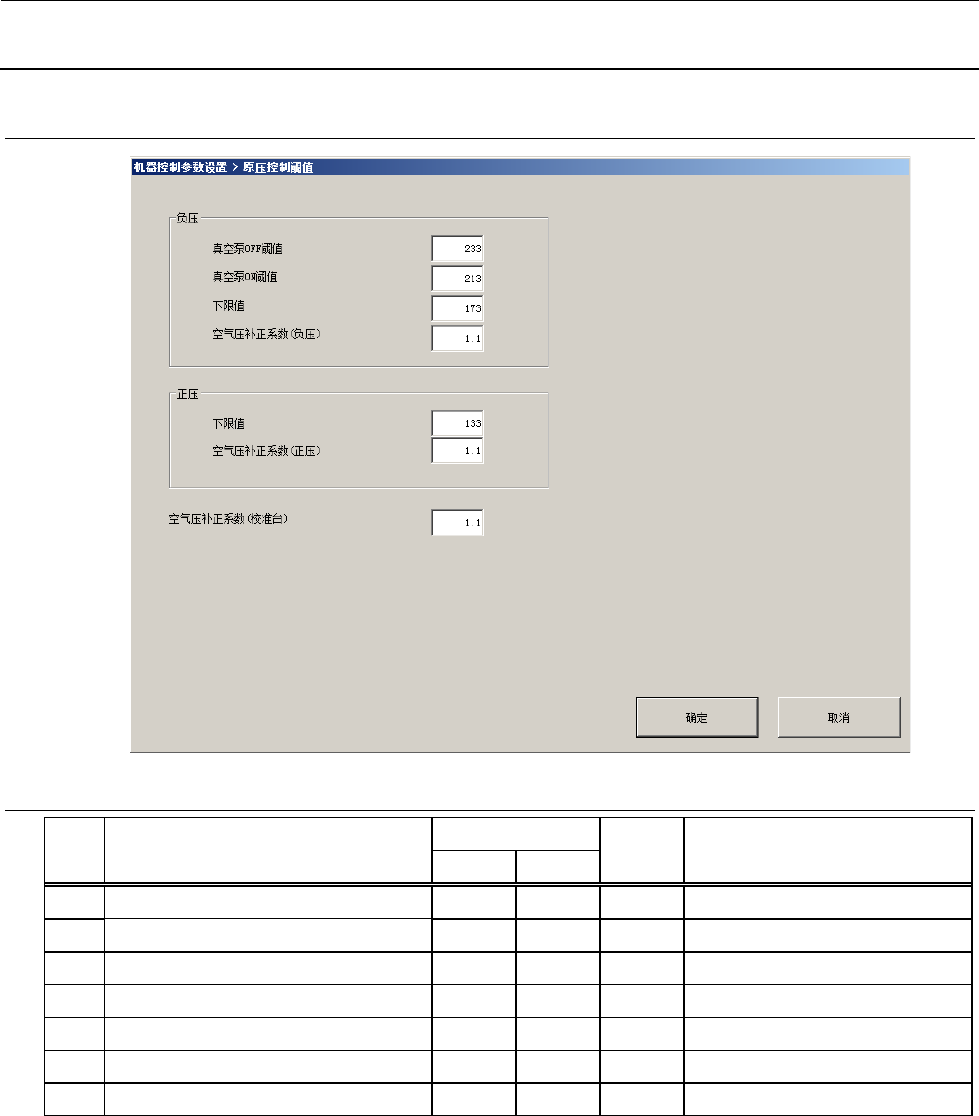
2-5-9 原压控制阈值
2-5-9-1 设定项目
No.
项目
输入范围
单位
备考
最小值
最大值
1 真空泵OFF阈值 未使用
2 真空泵ON阈值 未使用
3 下限值
4 空气压补正系数(负压)
-0.5kPa
5 下限值
%
6 空气压补正系数(正压)
5kPa
7 空气压补正系数(校准台)
%