00193562-01.pdf - 第90页
3 技術㈾料 使用手冊 SIPLACE S-27 HM 3.9 模組 概述-檢視模組 軟體版本 SR.503.xx 0 3/2003 ㆗文版 90 3.9.4 PCB 檢視模組 3.9.4. 1構 造 ¼œ:3 圖 3.9 - 3 PC B 檢視模組 ( 1 )P C B 攝影機、鏡頭 與照明裝置 (2) 攝影機放大器 3.9.4.2 技術㈾料 - PCB 檢視模組 3 ¼œ:2 定位基準點 每個取置程式最多 3 點 程式庫規模 最多 …
使用手冊 SIPLACE S-27 HM 3 技術㈾料
軟體版本 SR.503.xx 03/2003 ㆗文版 3.9 模組概述-檢視模組
89
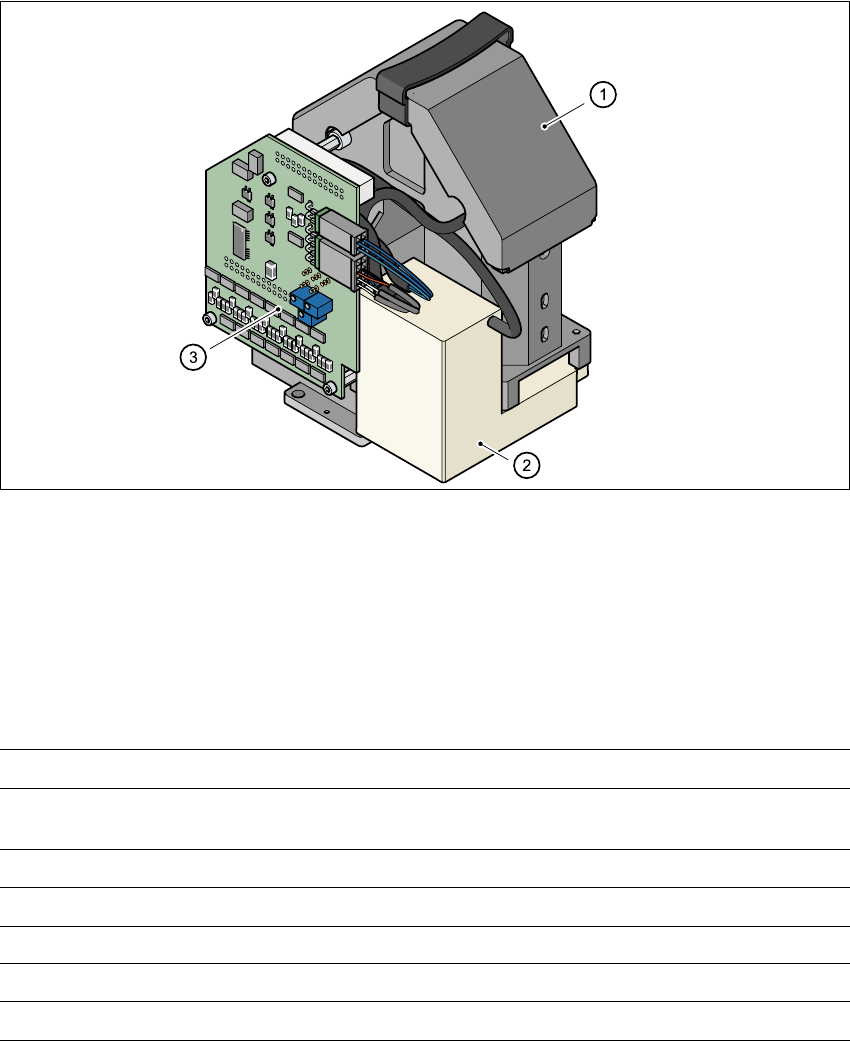
3.9.3 6 取置節 / 取置頭㆖的元件檢視模組 ( 標準攝影機 )
3.9.3.1構造
¼œ:3
圖 3.9 - 2 6 取置節 / 取置頭㆖的元件檢視模組 ( 標準攝影機 )
(1) 元件攝影機、鏡頭與照明裝置
(2) 攝影機放大器
(3) 照明控制
3.9.3.2 技術㈾料
¼œ:3
元件尺寸
1.6 mm x 0.8 mm to 32 mm x 32 mm
㊜用元件的範圍
0603 ㉃ 32mm x 32mm
PLCC, SO, QFP, TSDP, SOT, MELF, CHIP, IC BGA
最小零件腳距
0.5 mm
最小凸塊間距
0.56 mm
最小錫球 / 凸塊直徑
0.32 mm
視野
39 mm x 39 mm
照明方法
正面照明 ( 必要時可進行 3 階段設定 )
3 技術㈾料 使用手冊 SIPLACE S-27 HM
3.9 模組概述-檢視模組 軟體版本 SR.503.xx 03/2003 ㆗文版
90
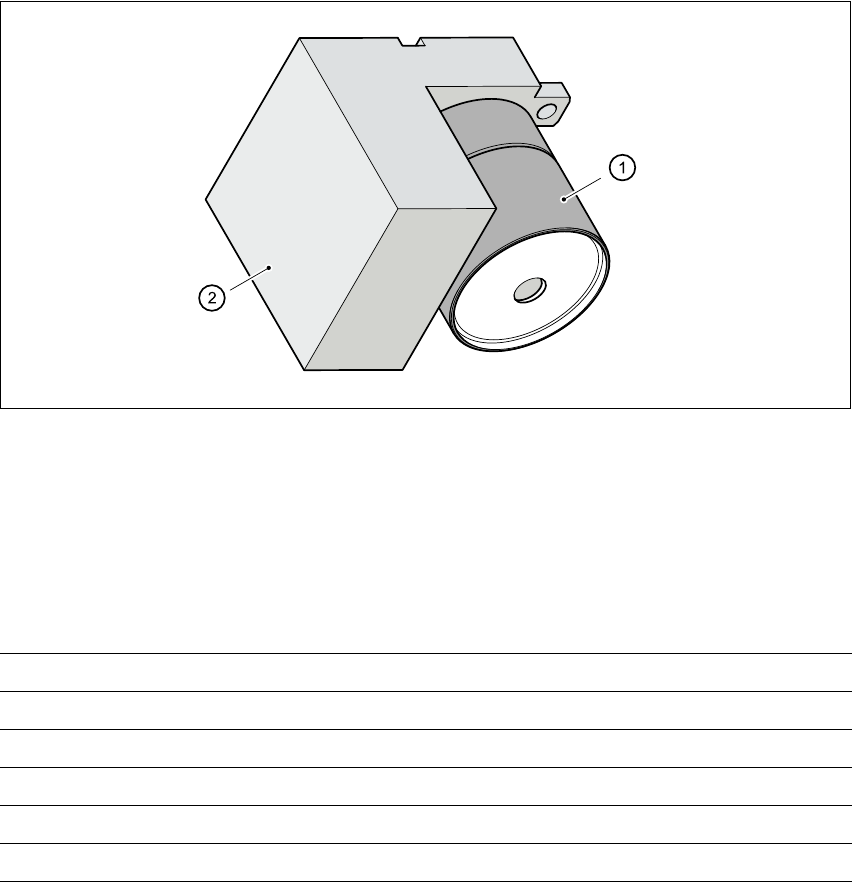
3.9.4 PCB 檢視模組
3.9.4.1構造
¼œ:3
圖 3.9 - 3 PCB 檢視模組
(1)PCB攝影機、鏡頭與照明裝置
(2) 攝影機放大器
3.9.4.2 技術㈾料- PCB 檢視模組
3
¼œ:2
定位基準點 每個取置程式最多 3 點
程式庫規模 最多 255 種定位基準-系統定位基準點 249
影像處理 幾何定位
照明方法 正面照明
每㆒定位基準點 / 不良定位基準點的認可時間
0.4 s
視野
5.7 mm x 5.7 mm
使用手冊 SIPLACE S-27 HM 3 技術㈾料
軟體版本 SR.503.xx 03/2003 ㆗文版 3.10 模組概述- PCB 輸送帶
91
3.10 模組概述- PCB 輸送帶
3.10.1說明
取置系統以單㆒輸送帶為標準配備。雙輸送帶則可做為選配配備。PCB 輸送帶的㊧側或㊨側在必要
時可以做為固定側。 3
33
3
在進行取置時,PCB 是由㆘方夾置的。因此每個 PCB 在 PCB 頂端與取置頭之間的距離可以保持不
變,因此也不受 PCB 厚度影響。取置速度因此也與 PCB 的厚度無關。另外,PCB 定位基準點的㆗
心定位也可以達到最佳化。由於 PCB 表面與 PCB 攝影機之間的距離保持㆒定,PCB 攝影機可以㆒
直聚焦在 PCB 的表面而得到相同的銳度。PCB 定位基準點的外形以最佳的方式配置在 PCB 攝影機
的 CCD 晶片㆖。 3
33
3
電路板輸送帶的寬度透過㆒個積體控制迴路進行設定及㈼視。它可以針對每㆒個叫出的程式來選
取。控制電子系統接著會驅動步進馬達直到它達到想要的寬度為止。因此將寬度調整獨立於其他機
器的部件之外。 3
33
3
輸送高度可以修改,藉此讓機器可以整合到輸送高度分別為 830、900、930 或 950 mm 的生產線㆖。
個別系統的 PCB 輸送帶之間透過 SIEMENS 或 SMEMA 的介面,根據需要來進行通訊。雙輸送帶或
單㆒輸送帶的輸送帶固定側都可以定為㊧側或㊨側。這個輸送帶的固定側可以輕易的從㊧側切換為
㊨側或者從㊨側切換為㊧側。 3
33
3
電路板輸送帶以光㈻感應器進行㈼視及控制。如果電路板到達取置區並通過光柵,輸送帶會停止。
㈲㆒個雷射光柵會測定電路板的位置。當電路板到達目標位置後,輸送帶會停止移動而電路板會從
底面進行夾置。 3
33
3
3
33
3