EZM-56M-A-电机-资料.pdf - 第3页
F A S TECH E zi-SER V O S T In c r eas in g 3 1 2 Ezi-SE R VO 是一种创新的闭回路步进系统,它不断使用安 装 电机后面的高分辨率编码器来监控当前位置。 编码器反 馈允许Ezi-SERVO每2.5微秒更新一次当前位置。 允许Ezi-SERVO的驱动器补偿位置损失,确保准确定位。 例如,由于负载突然变化,传统的步进电机和驱动器可能 失步,但Ezi-SERVO通过编码器反馈自动校正位…

武汉星之雨科技有限公司
www.whxzy-tech.com
FASTECH Ezi-SERVO ST
Increasing
3
1
2
Ezi-SERVO 是一种创新的闭回路步进系统,它不断使用安
装电机后面的高分辨率编码器来监控当前位置。 编码器反
馈允许Ezi-SERVO每2.5微秒更新一次当前位置。
允许Ezi-SERVO的驱动器补偿位置损失,确保准确定位。
例如,由于负载突然变化,传统的步进电机和驱动器可能
失步,但Ezi-SERVO通过编码器反馈自动校正位置。
闭回路系统
无增益调节
传统的伺服系统,为确保机器的性能,平滑度,位置误差及
低伺服噪声,需要调整伺服器的增益作为最初的关键步骤。
即使系统采用自动调整,系统安装后也需要手动调整,特别
是多轴相互依赖时。Ezi-SERVO 结合步进电机特性,加上闭
环运动控制算法的优点,减少了传统闭环伺服系统增益调节
的繁琐步骤。这意味着Ezi-SERVO 针对应用进行了优化,并
可立即使用!
这些繁琐的步骤,为工程师提供了高性能的伺服系统,而不
会浪费安装时间。
了费用及安装的空间。
即使在重负载和高速下,Ezi-SERVO的性能也非常出色。
统),传统伺服系统的惯量有时需要匹配齿轮箱,这样增加
Ezi-SERVO 特别适用于低刚度负载(例如,皮带和皮带轮系
Ezi-SERVO 系统采用闭环步进电机控制的独特特性,消除了
(根据负载控制电机电流)
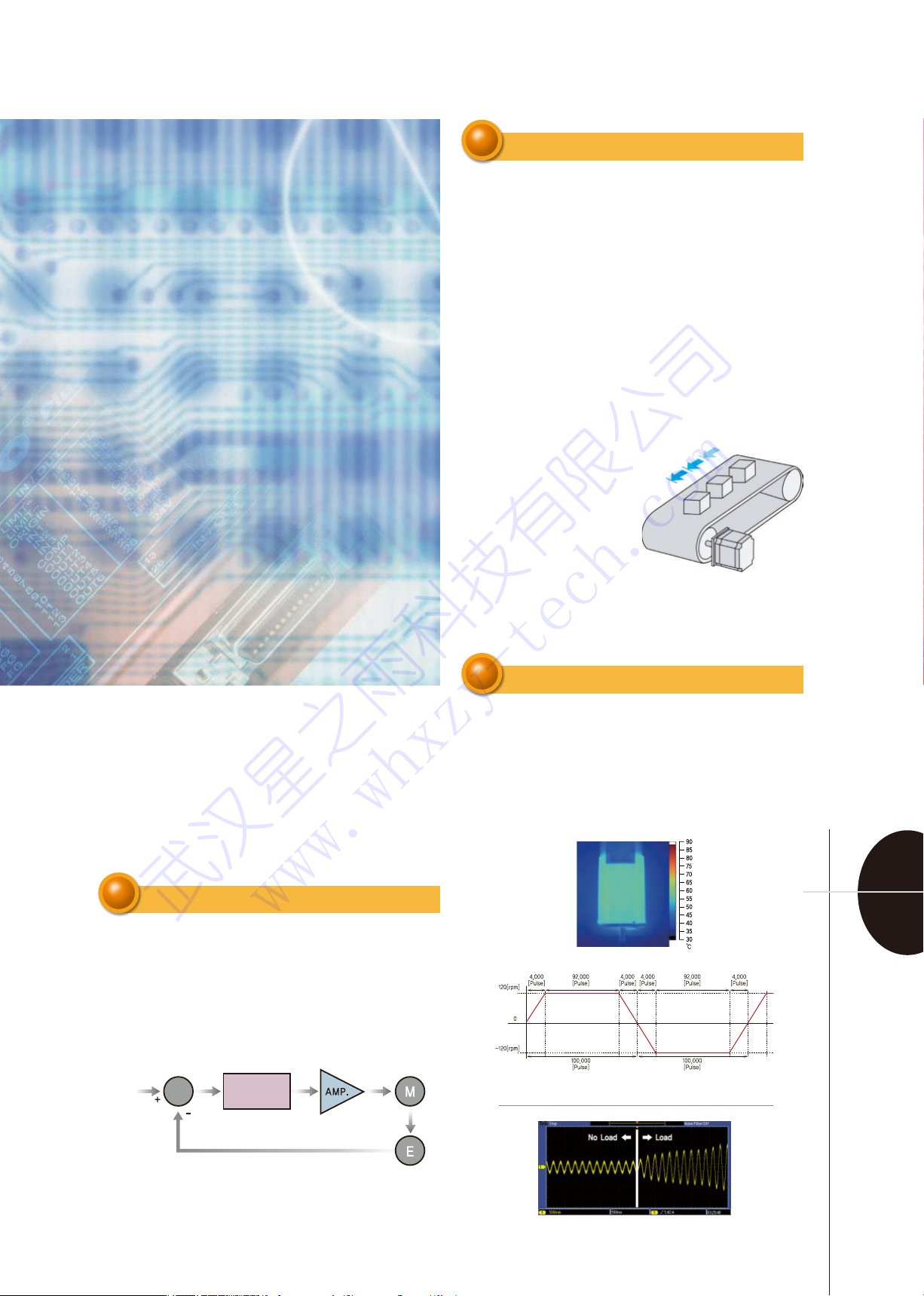
Ezi-SERVO 在电机负载较低时降低电机电流,在负载较高
时增加电机电流。
Ezi-SERVO 通过操作电机电流,可以最大限度地减少电机
热量并节省能源。
电机温度[通过热成像相机测量]
根据负载控制电机电流实例
减少热量/节能
3
测量电机温度的条件
运行4小时,电机表面温度饱和
反馈
控制器
电机
编码器
目标位置
偏差
武汉星之雨科技有限公司
www.whxzy-tech.com
5
Torque [N
.
m]
Speed [rpm] × 100
1.6
0.4
0.6
0.8
1.0
1.2
1.4
0.2
0
0.1 1 2 3 4 5 6 7 8 9 10 12 14 16 18 20 22 24 26 28 30
Motor Voltage: 40V
Motor Voltage: 24V
Torque increase due to
higher motor voltage
4
7
6
8
(增加电机电压)
Ezi-SERVO增加提供给电机的电压,以增加高速时的扭矩。
在电机速度增加的情况下,反电动势将相应增加,并导致
改善转矩
压以补偿转矩下降的功能,所以电机在高速运行时转矩可
高速时电机扭矩的减小。由于Ezi-SERVO具有增加电机电
提高30%左右。
测量条件: 驱动器 = Ezi-SERVO -ST-56L
电机电压 = 40VDC
电压 = 24VDC
高速时的扭矩提高约30%。
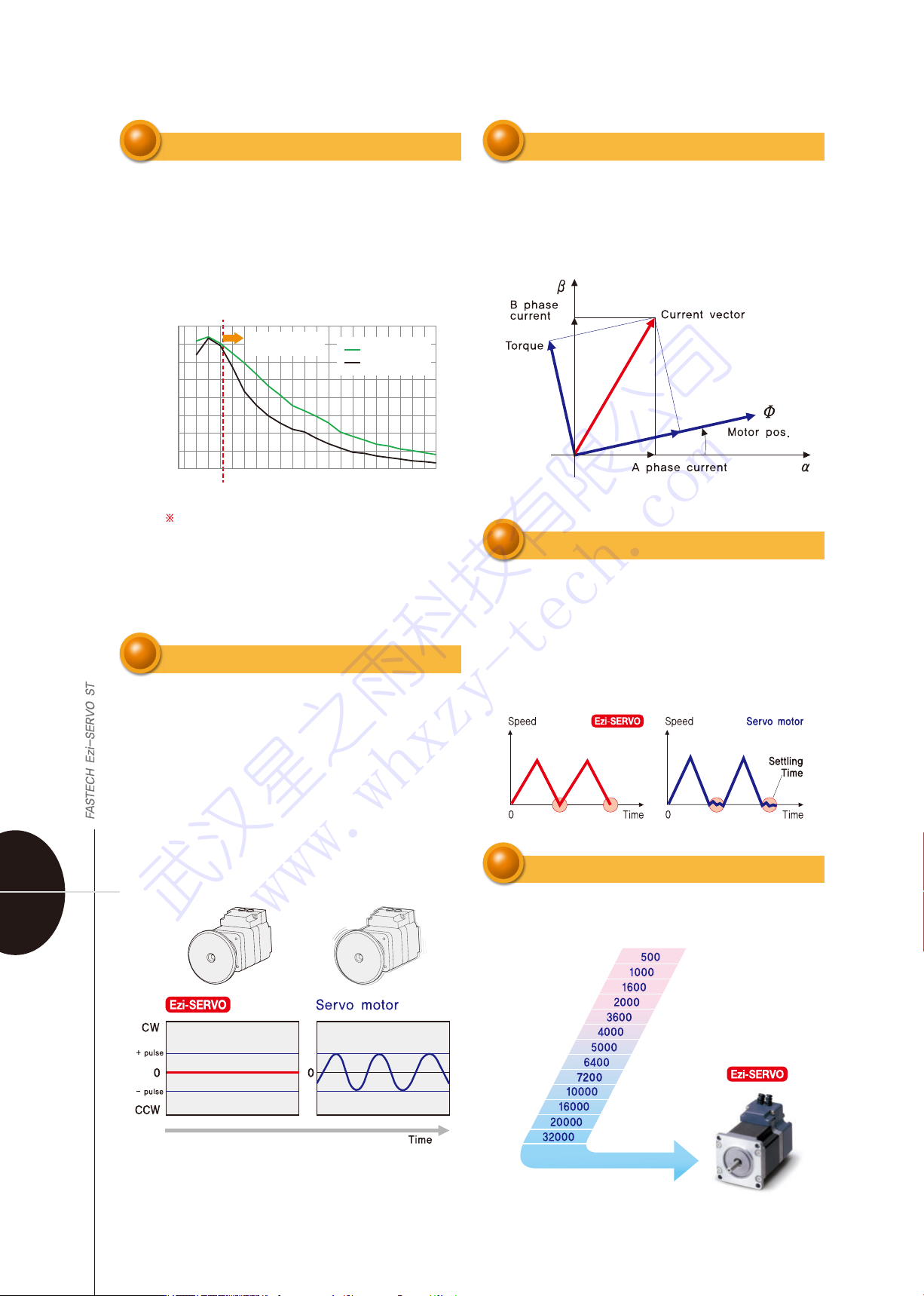
无振荡
传统的伺服电机,当超出其位置时,驱动器会试着用相反
的方向来调整,特别是在高增益的应用中,这种叫“空振
现象”。静止摩擦力明显高于运行摩擦力的系统中是十分
特的特性,并将自身锁定到所需的目标位置,消除空振。
此功能在纳米技术制造,半导体制造,视觉系统和喷墨打
普遍的,其解决方案是降低增益,但精度会受到影响。或
使用Ezi-SERVO运动控制系统!Ezi-SERVO利用步进电机独
印等应用中特别有用。
完全停止振荡
平滑且精准
Ezi-SERVO 是一款高精度伺服驱动器,采用32000脉冲/转
的高分辨率编码器。与传统的微步进驱动器不同,板载高
性能MCU(微控制器单元)执行矢量控制和滤波,产生最小
波纹的平滑旋转控制。
快速响应
类似于传统的步进电机,Ezi-SERVO 可以与指令脉冲同步,
从而提供快速的位置响应。当需要零速稳定性和短距离内
的快速运动时,Ezi-SERVO是最佳选择。
传统的伺服电机系统,由于对当前位置的不断监测,在指
令输入信号与结果之间会有自然的延迟。
高分辨率
位置命令的单位可以精确划分。
(最高32,000脉冲/转)
4
武汉星之雨科技有限公司
www.whxzy-tech.com