EasyOLP_V6.1中文说明书.pdf - 第374页
10-42 lvswG}] lvswG}] <Lead Parameter &Group > 设定 L ead 元件的 Lead Paramete r 与 Lead Group 。 可以支援 8 个 Lead Parameter 与 16 个 Lead Group 。 在 L ead Parameter 区设定 Lead 的各种 Parameter , 各列的说明如下。 No. Lead Parame t…
10-41
Part Browser
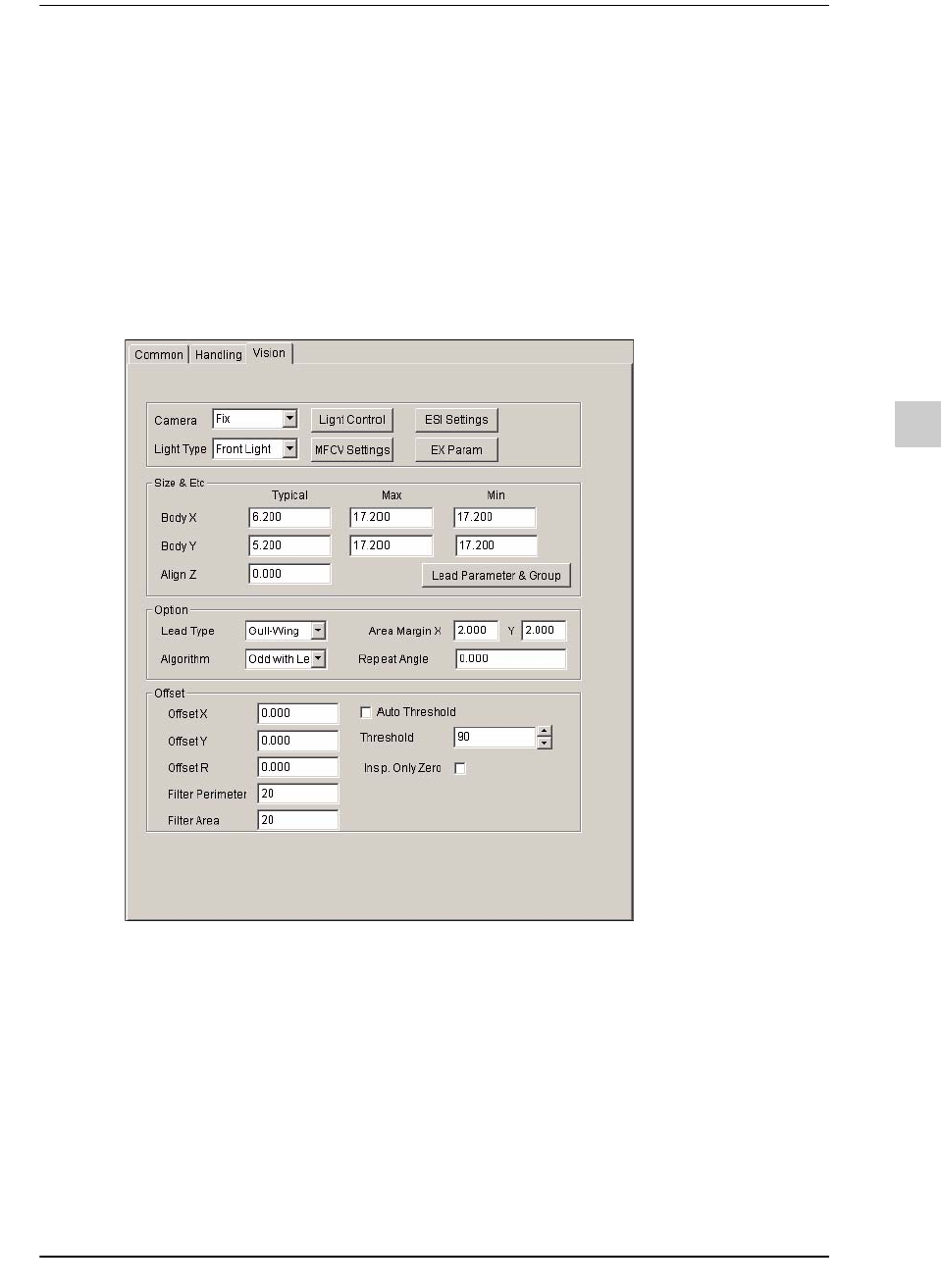
Camera及Option的其余内容请参阅[10.5.3.1. 共同区域,第 10-29页]
10.5.3.6. User IC
设定User IC、Connector-1、Connector-2及Hemt元件的 Align数据。
各细项的说明如下。
Repeat Angle
装贴高精密元件时所使用的功能,针对角度补正之前与之后的结果
值进行比较后决定是否装贴。
Repeat Angle值设定为0.1时,在进行了初始视觉识别后根据视觉
识别结果而补正角度并且重新识别,如果识别后的差异大于0.1则
重新补正后再重新识别,小于 0.1则装贴。
Body X
元件本体(Body)的X方向尺寸
Body Y
元件本体(Body)的Y方向尺寸
Align Z
识别高度。以元件的底面为基准,如果要识别上侧则设定为负数 (-)、如果要
识别下侧则设定为正数(+)。
10-42
lvswG}]
lvswG}]
<Lead
Parameter
&Group>
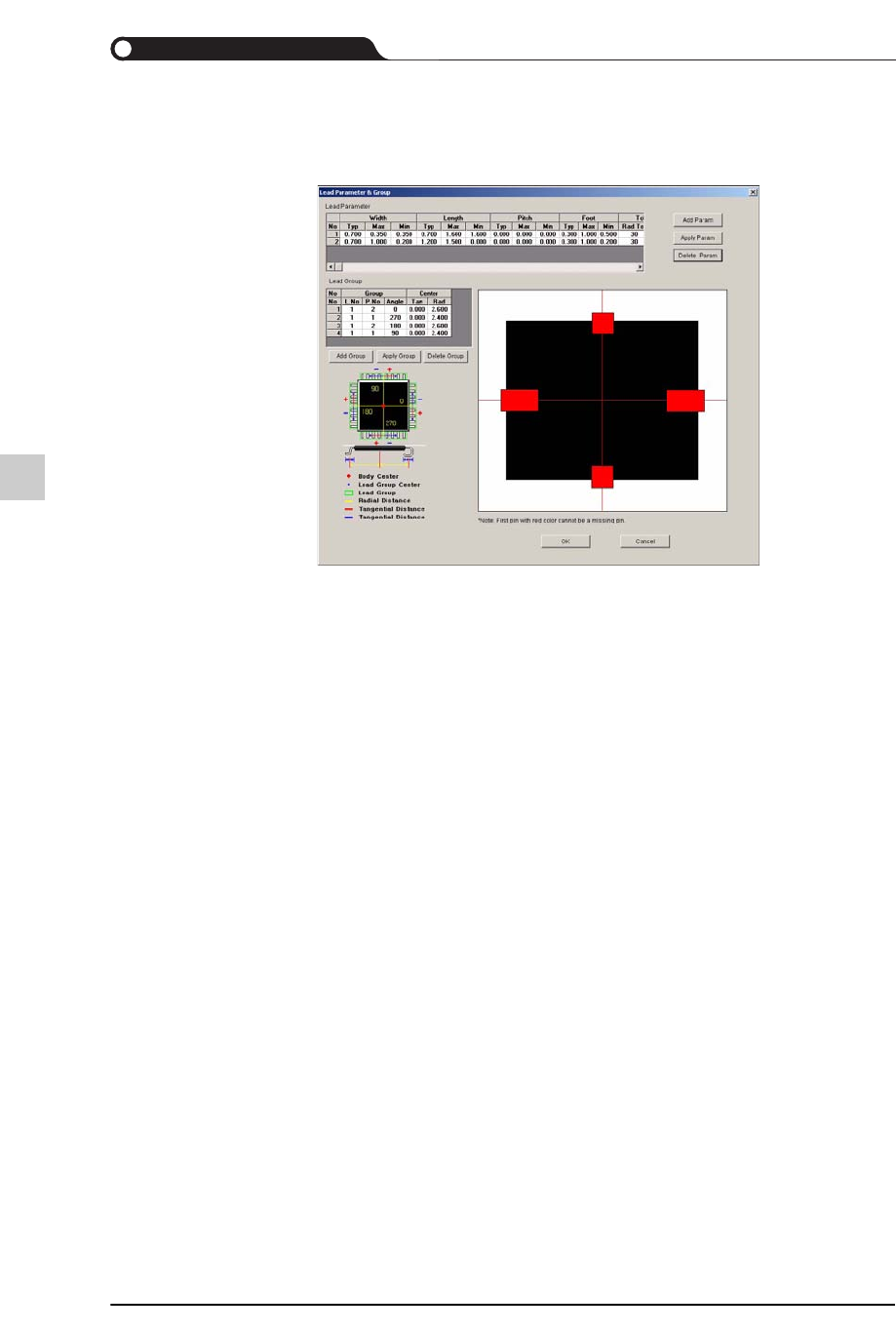
设定Lead元件的Lead Parameter与Lead Group。可以支援8个 Lead
Parameter与16个Lead Group。
在Lead Parameter区设定Lead的各种Parameter,各列的说明如下。
No.
Lead Parameter编号。
Width Typ
Lead的宽度。
Width Max
包含最大容许误差的Lead宽度。
Width Min
包含最小容许误差的Lead宽度。
Length Type
Lead的长度。
Length Max
包含最大容许误差的Lead的长度。
Length Min
包含最小容许误差的Lead的长度。
Pitch Type
相邻Lead的中心之间的距离。
Pitch Max
包含最大容许误差的相邻Lead的中心之间的距离。
Pitch Min
包含最小容许误差的相邻Lead的中心之间的距离。
Foot Type
Lead与底面接触的长度。
Foot Max
包含最大容许误差的Lead与底面接触的长度。
Foot Min
包含最小容许误差的Lead与底面接触的长度。
Tolerance
Rad
在Lead的长度方向所允许的公差。以相对于Lead
Length的百分率进行设定。
Tolerance
Tan
Lead朝旁边弯曲时所允许的公差。以相对于Lead Pitch
的百分率进行设定。
在Lead Group区设定Lead Group的相关事项,各列的说明如下。
10-43
Part Browser
No
Lead Group编号。
Group L. No
该Lead Group所具有的Lead数量。
Group P. No
Lead Group所参照的Lead Parameter编号。
Group Angle
Lead Group位于元件的方向。以右侧边为基准(0),以 逆
时针方向设定正数(+)值。
Center Tan
从元件的基准点(一般为元件中心)到Lead Group的中
心为止的切线方向距离。
Center Rad 从元件的基准点(一般为元件中心 )到Lead Group的中
心为止的法线方向距离。
各键的说明如下。
<Add Param>
在Lead Parameter区添加参数。
<Apply
Param>
适用参数。输入的参数值不正确时,将弹出下列画面。
<Delete
Param>
删除参数。删除时,需要单击 No列的相应参数编号加以
选择后再删除。在没有选择的情形下删除时,将弹出下
列画面。
<Add Group>
在Lead Group区添加群。
<Apply
Group>
适用群。
<Delete
Group>
删除群。
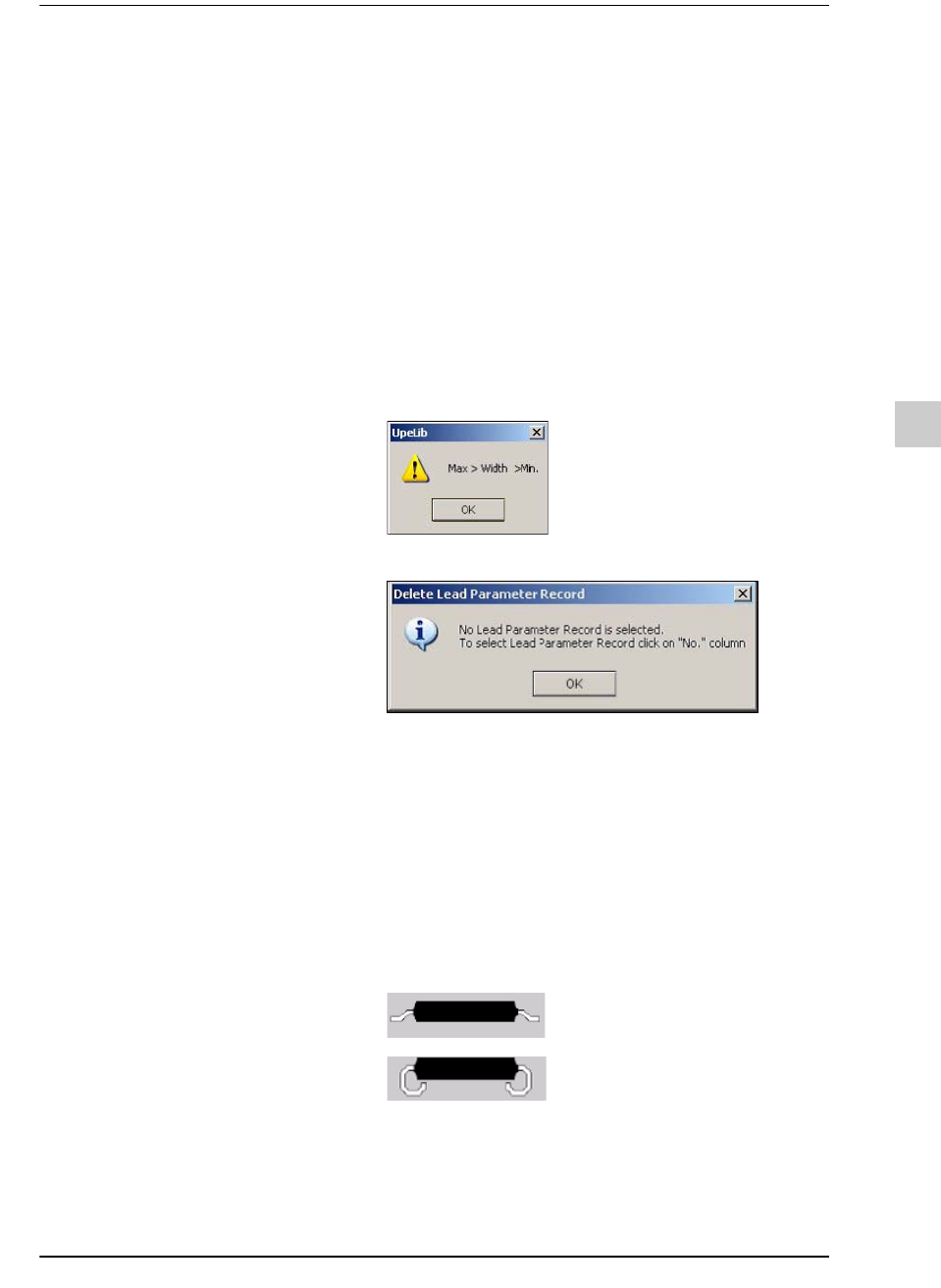
Lead Type Lead的种类
Gull- Wing
J-Lead
Algorithm
元件的识别算法。
All Body
由于元件本体(Body)的杨色较亮而使Lead与本体
(Body)全部发亮时。