JAKA Zu 7电控柜V2.1-硬件手册(英文版).pdf - 第11页
9 1.8 Movement without Drive Pow er In the unlik ely event of an emergenc y situation where r obot power is either not possible or unwanted, the robot joint can be f orced to m ove in two ways: 1. Forced m anual drive: B…

8
JAKA constantly strives to improve the performance and reliability of our robots. JAKA is not responsible
for any errors or omissions in this manual, and reserves the right of final interpretation of this manual.
Risks
A direct or indirect physical contact relationship exists when there an interaction between the operator and
the robot exists. Operators must have sufficient self-protection awareness when contacting, and integrators
need to carefully consider the use conditions when using the company's robots. The following are possible
dangerous situations:
①Injury caused by the robot dropping during handling;
②Injury caused by the loosening of the robot fixing screw;
③Finger-pinching and collision injury during the operation;
④Injury caused by the unrepaired malfunction robot;
⑤Danger caused by the usage of a sharp end effector or tool connection;
⑥Injury caused by the operation in a toxic or corrosive environment.
1.6 Usage
collaborative operation, where the robot operates without fences and/or together with a human. Collaborative
operation is only intended for non-hazardous applications, where the complete application, including tool, work
piece, obstacles and other machines, is without any significant hazards according to the risk assessment of the
specific application.
Any use or application deviating from the intended use is deemed to be impermissible misuse. This
includes, but is not limited to the following:
①Use in potentially explosive environments ;
②Use in medical and life critical applications ;
③Use before performing a risk assessment ;
④Use where the rated performance levels are insufficient ;
⑤Operation outside the permissible operating parameters.
1.7 Emergency Stop
When an emergency occurs, press the emergency stop button to stop all movement of the robot
immediately. Emergency stop cannot be used as a risk reduction measure, but as a secondary protective
device.
JAKA Zu
®
7 is an industrial collaborative robot suitable for use in industrial environments, for
example, for handling tools and fixtures, or for processing or transferring components or products. JAKA Zu
®
7
is only allowed to be used under specified environmental conditions.
JAKA Zu 7 V2.5
JAKA Zu
®
7 is equipped with special safety-related features, which are purposely designed for
9
1.8 Movement without Drive Power
In the unlikely event of an emergency situation where robot power is either not possible or unwanted, the
robot joint can be forced to move in two ways:
1. Forced manual drive: By pushing or pulling the robot arm, it can force the joint to rotate. The brake of
each joint has a friction clutch. When the joint is subjected to a torque greater than the friction torque of the
friction clutch, the joint rotates.
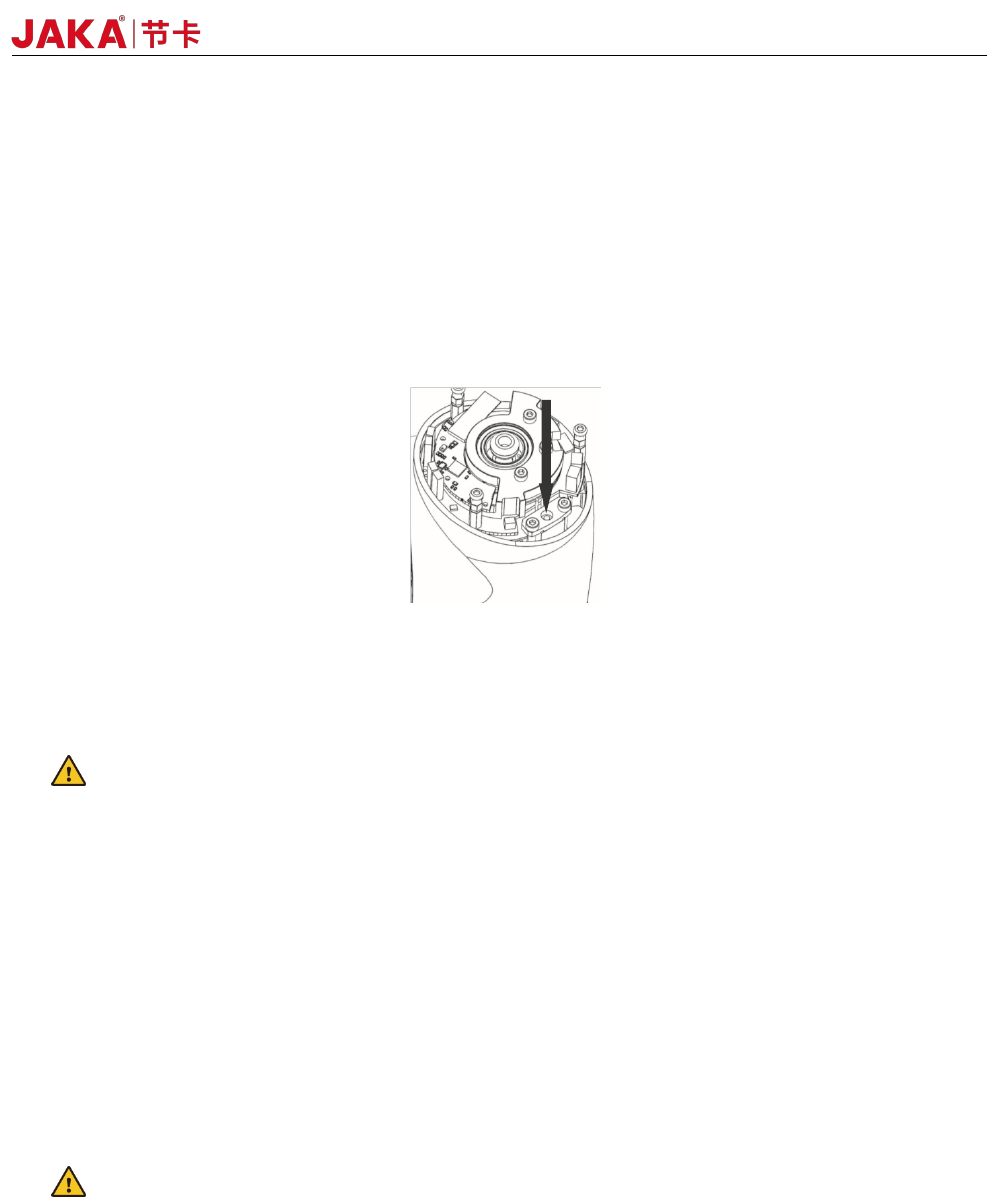
2. Manual brake release: Remove the joint cover by removing the screws (four for big joints and three for
small joints) that fix it. Press the plunger on the small electromagnet (shown below) to release the brake.
Fig
1-1
Warnings:
1. Moving the robot arm manually is intended for urgent emergencies only and might damage the joints.
2. If the brake is released manually, gravitational pull can cause the robot arm to fall. Always support the
robot arm, tool and work item when releasing the brake.
1.9 Precautions for Transportation and Handling
Transport the robot in the original packaging. Save the packaging material in a dry place; you may need to
pack down and move the robot later on.
Lift both tubes of the robot arm at the same time when moving it from the packaging to the installation
place. Hold the robot in place until all mounting bolts are securely tightened at the base of the robot.
Cautions:
1. Make sure not to overload your back or other bodyparts when the equipment is lifted. Use proper lifting
equipment. All regional and national guidelines for lifting shall be followed. JAKA cannot be held responsible for
any damage caused by transportation of the equipment.
2. Make sure to follow the installation instructions when installing the robot.
JAKA Zu 7 v2.5
10
2 Welcome from JAKA Zu Robot
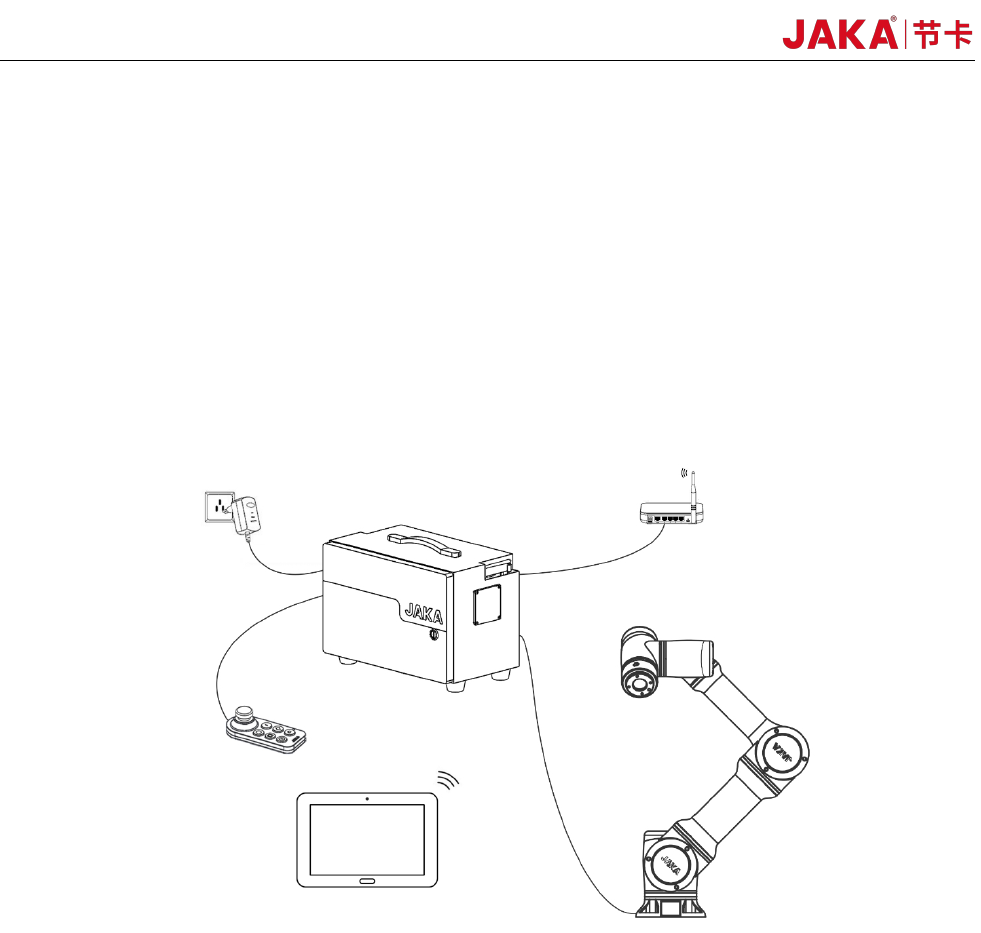
2.1 Overview of robot configurations
Fig 2-1 Overview of robot configurations
Electrical Cabinet and Control Stick:The cabinet contains the robot controller and many different kinds
of electrical interface,And also equipped with a control stick.
Router and network cables:The Ethernet port of the cabinet is connected to the router, so as the
operation terminal. It is recommend that a dedicated router is used to ensure reliable connection.
2.2 Operation Terminal
JAKA Zu and C APP is provided by JAKA on Android system, and the required configurations are as
follows:
JAKA Zu 7 V2.5
Before reading this chapter, please ensure that chapter 1 Safety has been read and fully understood.
In this chapter the basics of JAKA Zu Robots would be introduced , for future hardware
specifications and software usages please refer to other chapters.
During using of JAKA Zu robots,if quick help is needed, feel to free to dail our hotline
:(+86)400-006-2665.
As shown in Fig 2-1, JAKA Zu robots uses wireless connection, and the followings are needed:
Operation Terminal:Device used to program and set robot.
Robot Arm:The core moving part of robot to achieve designated movements. And at the end of the arm,a
ring indicator, buttons used to drag and tech, TIO interface are located.