JAKA Zu 7电控柜V2.1-硬件手册(英文版).pdf - 第35页
33 n Internal c onnect4.7k resistor. 4 D O1 O yello w Digital outp ut 1. NPN type. Open Drain output. Current ≤0.5A per channel. 5 D O2 O Pink Digital outp ut 2. NPN type. Open Drain output. Current ≤0.5A per channel. 6 …
32
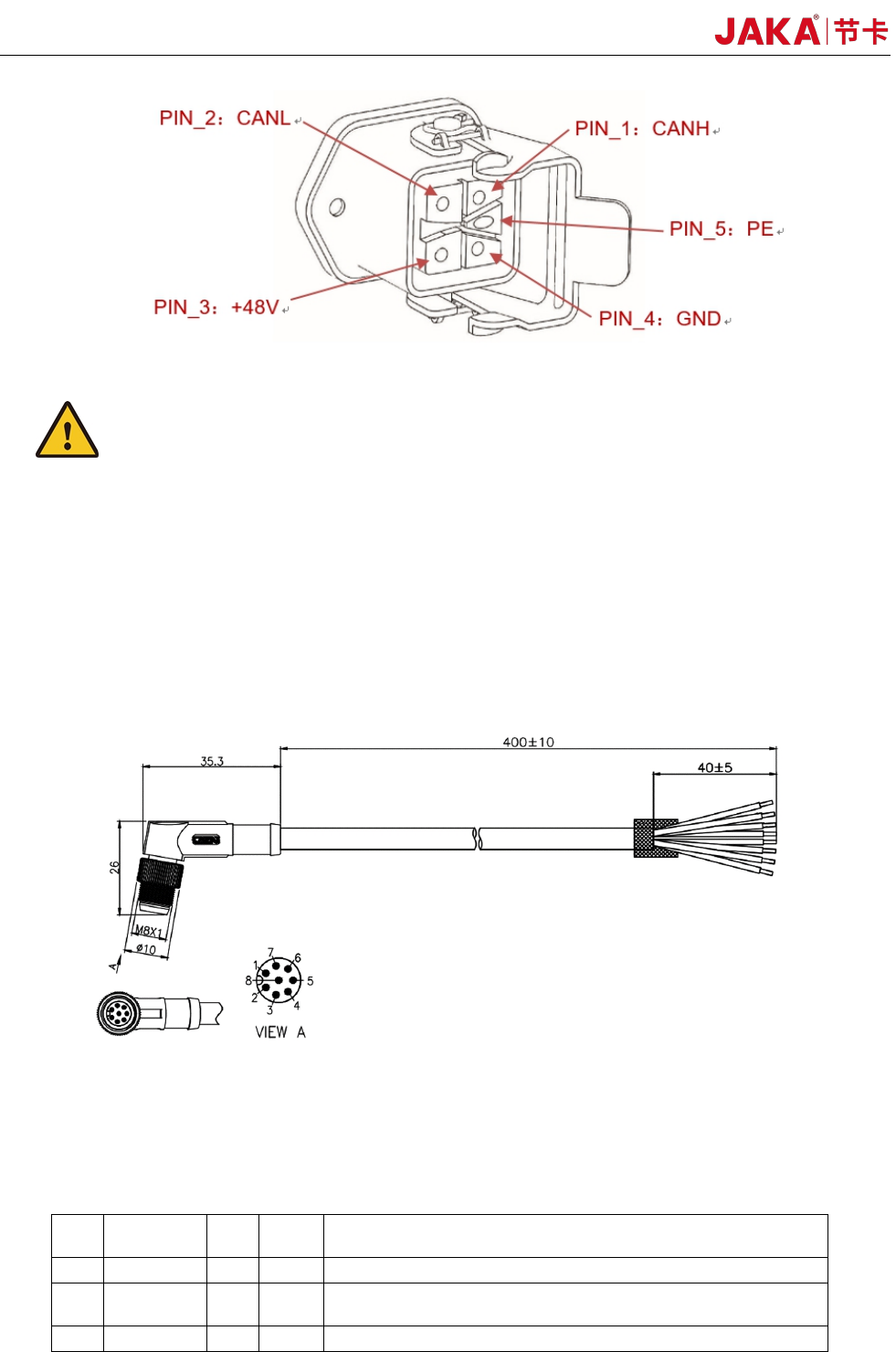
Figure 4-16
Caution:
1.Do not disconnect the robot cable when the robot is turned on.
2.Do not extend or modify the original cable.
4.5 Tool Input and Output
The tool input and output position is on the side of the robot tool flange. Includes two digital inputs, two
digital outputs and one analog input.
If the customer needs to choose the TIO external cable, please call 400-006-2665. Figure 4-17 shows the
cable specifications.
Figure 4-17 Cable specifications
4.5.1 TIO function description
The TIO interface function is described in the following table:
PIN DEFINE I/O
Line
color
DESCRIPTION
1 +24V -
red 24V positive. Maximum continuous current to 1.0A
2 DI1 I
blue Digital input 1. NPN type. Optocoupler Cathode input.
Internal connect4.7k resistor.
3 DI2 I
gree Digital input 2. NPN type. Optocoupler Cathode input.
JAKA Zu 7 V2.5
33
n Internal connect4.7k resistor.
4 DO1 O
yello
w
Digital output 1. NPN type. Open Drain output. Current
≤0.5A per channel.
5 DO2 O
Pink Digital output 2. NPN type. Open Drain output. Current
≤0.5A per channel.
6 AIN_P I
brow
n
Analog input.Supports -10V~+10V voltage input. Decouple
with the AIN_N pin.
7 AIN_N I
white Analog input:Negative. Decouple with the AIN_P pin.
8 GND -
gray GND. 24V Power Ground.
1. TIO analog input interface
Analog input AI1 supports -10V~+10V high precision voltage range input.
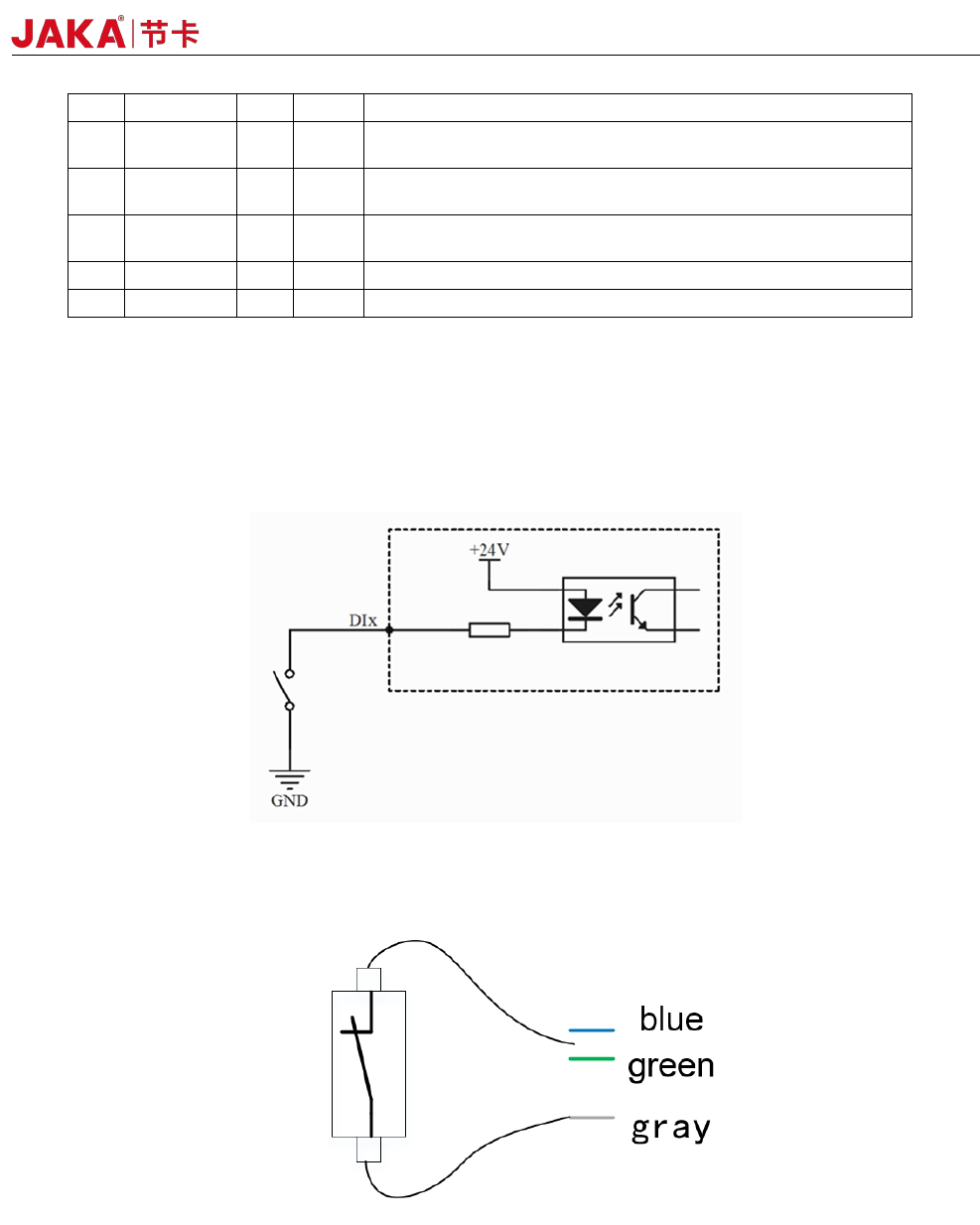
2. TIO digital input interface
The digital input uses the optocoupler cathode input and is active low. Internally connected 4.7k resistors.
Figure 4-18
a)Type of the dry contact input:
Figure 4-19
The dry contact input (ie, switch input) is connected to the negative pole of the 24V power supply in TIO
(gray wire), and the other end is connected to the DI digital input (blue or green wire), as shown in Figure 4-19.
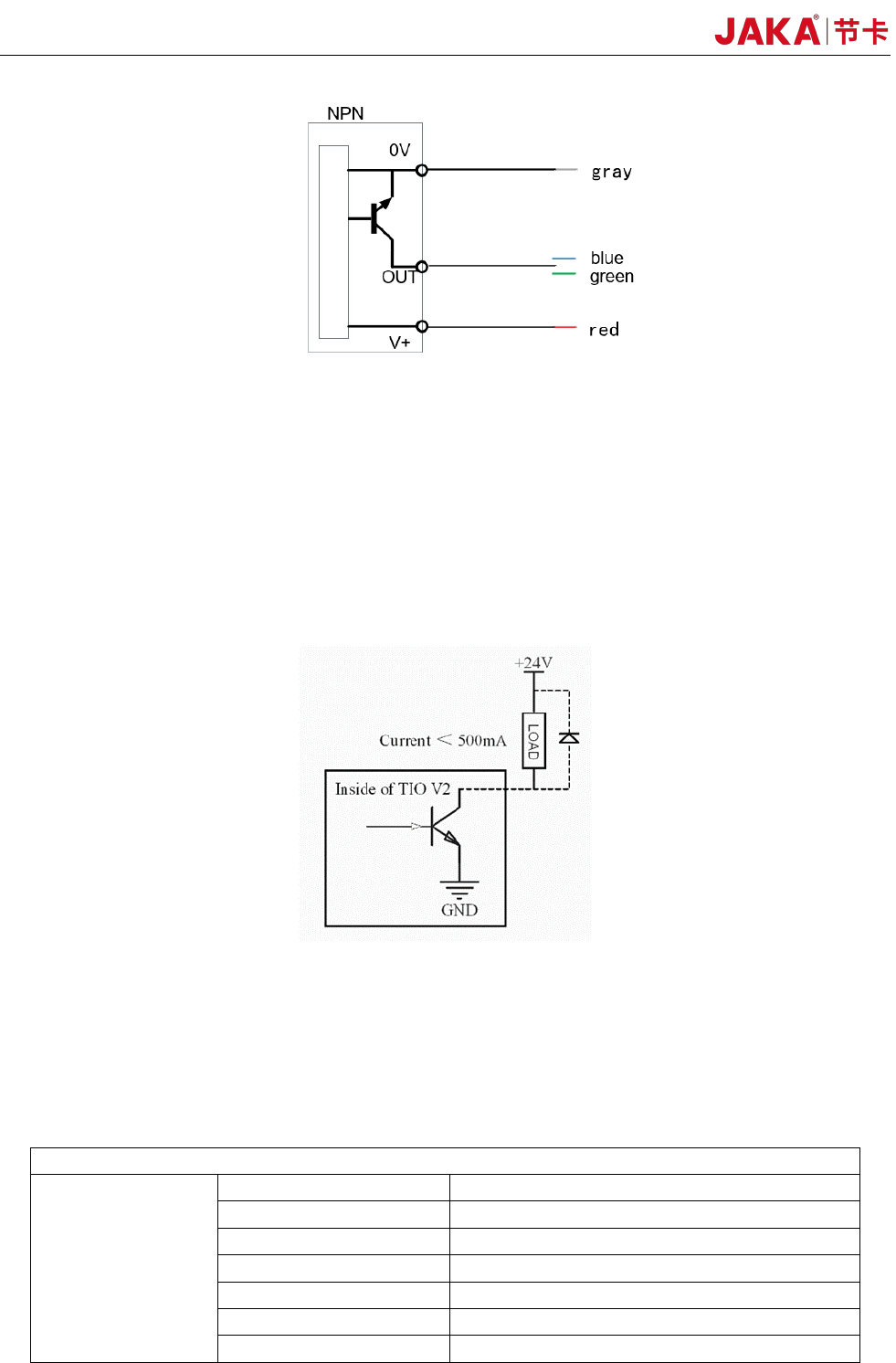
b) The input type is NPN
JAKA Zu 7 v2.5
34
Figure 4-20
Figure 4-20 shows the block diagram of the NPN input device connection: the V + pin is connected to +
24V (red wire), the 0V pin is connected to the negative pole (gray wire), and the OUT pin is connected to DIx
(blue or green wire).
3. TIO digital output interface
The digital output interface uses an open collector output that supports up to 500mA of current capability.
Note: If an inductive load (such as a relay, electromagnet, DC motor, etc.) requires an external
freewheeling diode.
Figure 4-21
* Note: It is strongly recommended to use protection DIODES for the inductive loads (such as relays,
electromagnets, DC motors, etc.). Otherwise, this port may damage the hardware circuit
4.6 Technical Specifications
Product Features
Maximum payload 7kg
Weight (including cable) 22kg
Working radius 819mm
Repeatability
Degrees of freedom 6
Programming Graphical drag-and-drop programming
FlexPendant Type Mobile device (PAD/mobile)
1.JAKA Zu
®
7 Robot Technical Specifications:
Robot type: JAKA Zu
®
7
JAKA Zu 7 V2.5
JAKA Zu
®
7:±0.02mm