SPCworks 中文说明[REV 1.2].pdf - 第41页
3. 统计 系 工程分 析和工程控制 PARMI CO ., LTD. 31 REV 1 .2 ) ( 4 n C = ) 2 1 ( ) 2 ( 1 2 - G G × - n n n , ) 1 ( ) ( - = G n n ! [ 图 3-30 ] 标 准 偏差 管理 图 (S Cont rol C har t) 3.6. 5 各 个 的 测 定 值 管理 图 ( x Con tr o l Char t) 各 个 的 测 定 值…
SPCworks 统计软件
SPI HS30
30
REV 1.2
● LCL =
s
3-R =
)(
)(3
2
3
nd
R
ndR ××- ( ∵
s
=
)(
2
nd
R
)
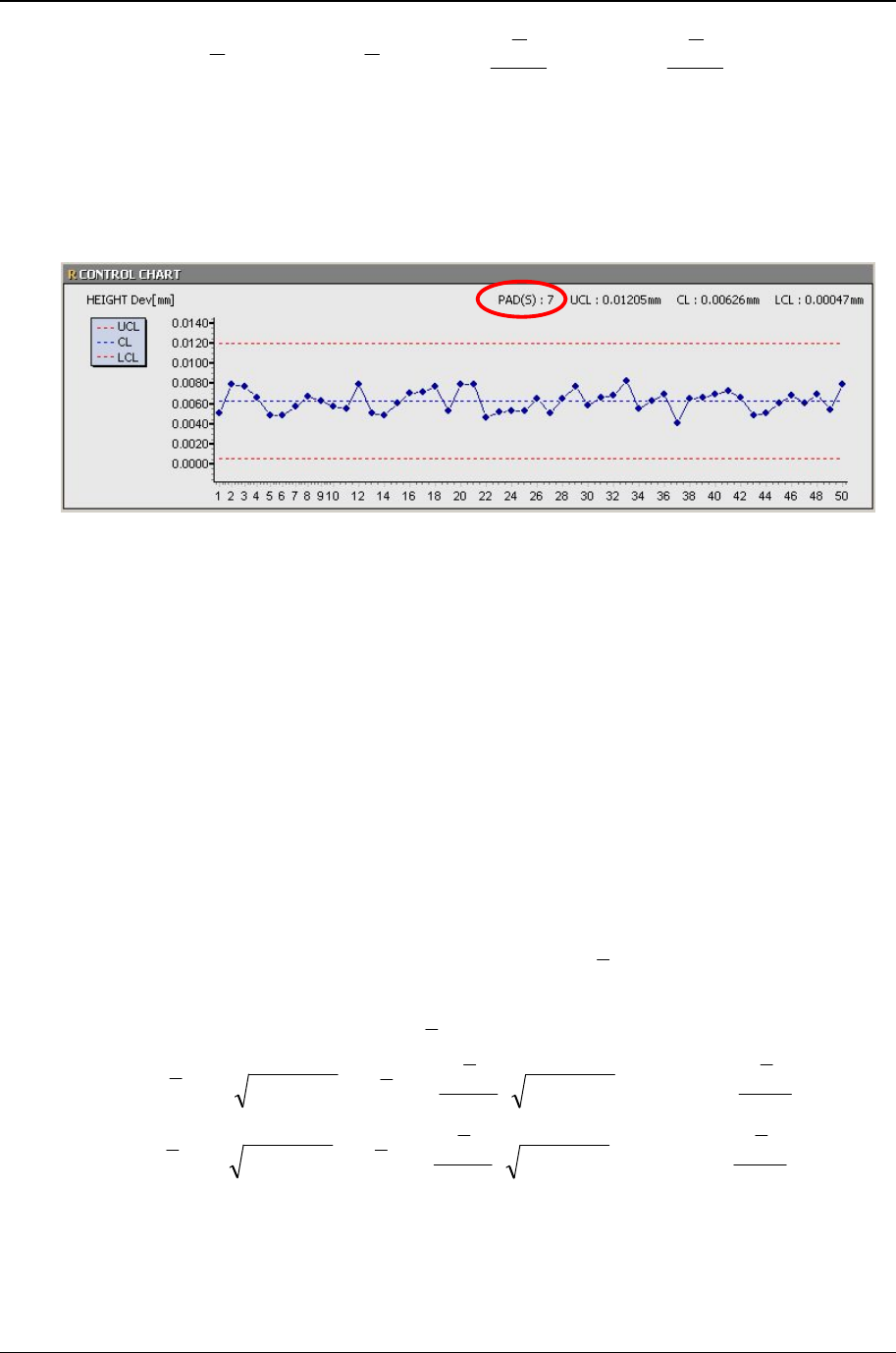
[图 3-29 是50张基板,每基板有7个pad-高度数据的平均值管理图. 窗口横轴是基板编号, 竖轴
是高度值显示. 窗口内各打点显示各部分群高度范围平均值,用虚线连接的横线是总平均. 下面红
色虚线是管理下限线(LCL), 上面红色虚线是管理上限线(UCL).
[图 3-29] 范围管理图(R Control Chart)
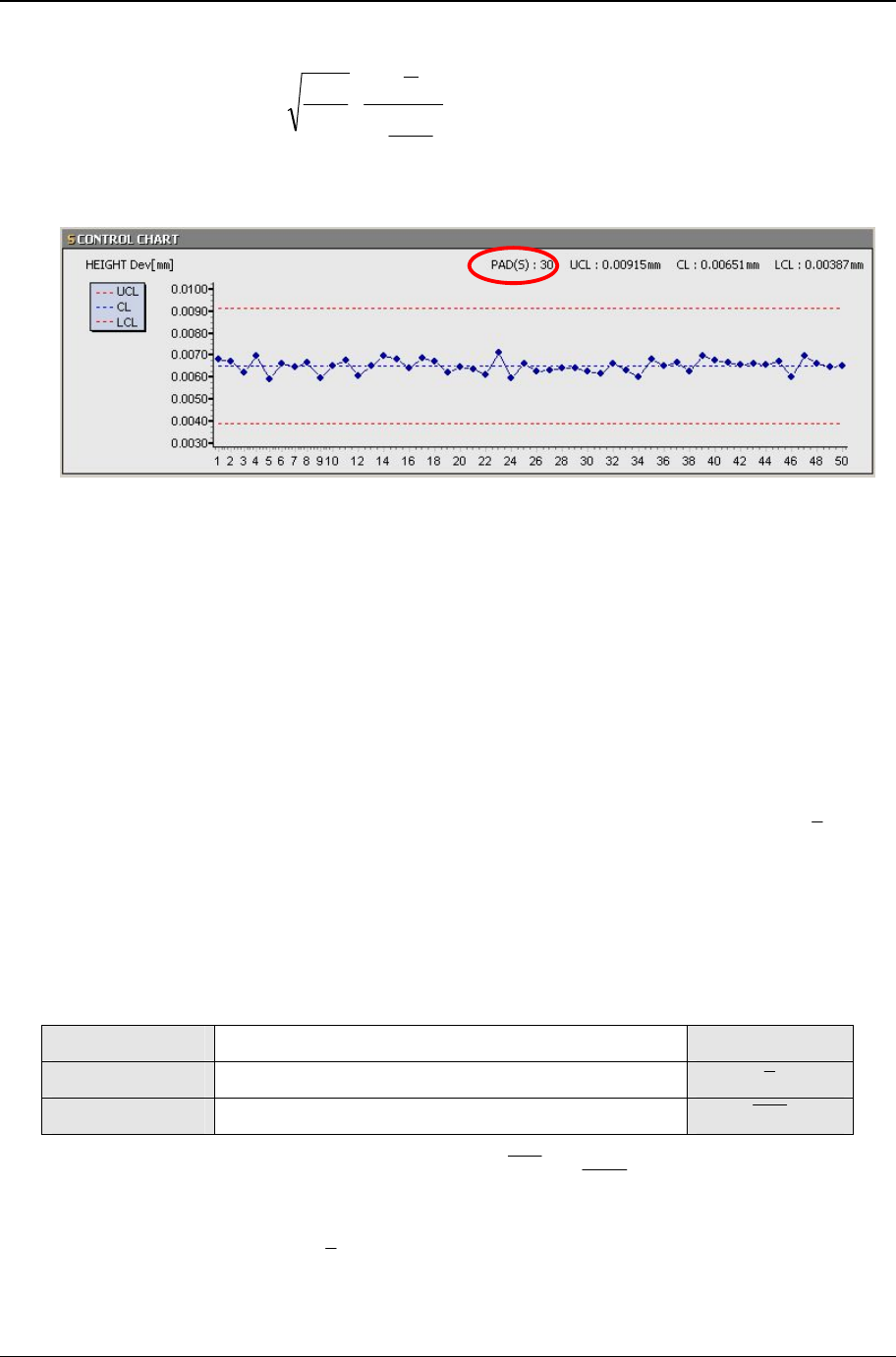
3.6.4 标准偏差管理图(S Control Chart)
部分群形成的pad数超过11以上时,软件自动显示标准偏差管理图. 偏差管理图是利用各部分群标
准偏差(S),在工程西格玛(
s
)管理时使用的目的管理图. 管理图内打点统计量是各部分群内的标准
偏差(S),中心线(Center Line)各打点统计量的标准偏差的平均(
S ).
● CL =
s
×)(
4
nC =
S
● UCL =
)(13
2
4
nCS -+
s
=
)(1
)(
3
2
4
4
nC
nC
S
S -××+
(∵
s
=
)(
4
nc
S
)
● LCL =
)(13
2
4
nCS --
s
=
)(1
)(
3
2
4
4
nC
nC
S
S -××-
(∵
s
=
)(
4
nc
S
)
)(
4
nC 是部分群大小(n)常数以存。 )(
4
nC 值是小于1,但部分群内(n)增大时接近1常数
3. 统计系工程分析和工程控制
PARMI CO., LTD.
31
REV 1.2
)(
4
nC =
)
2
1
(
)
2
(
1
2
-
G
G
×
-
n
n
n
, )1()(
-
=
G
nn !
[图 3-30] 标准偏差管理图(S Control Chart)
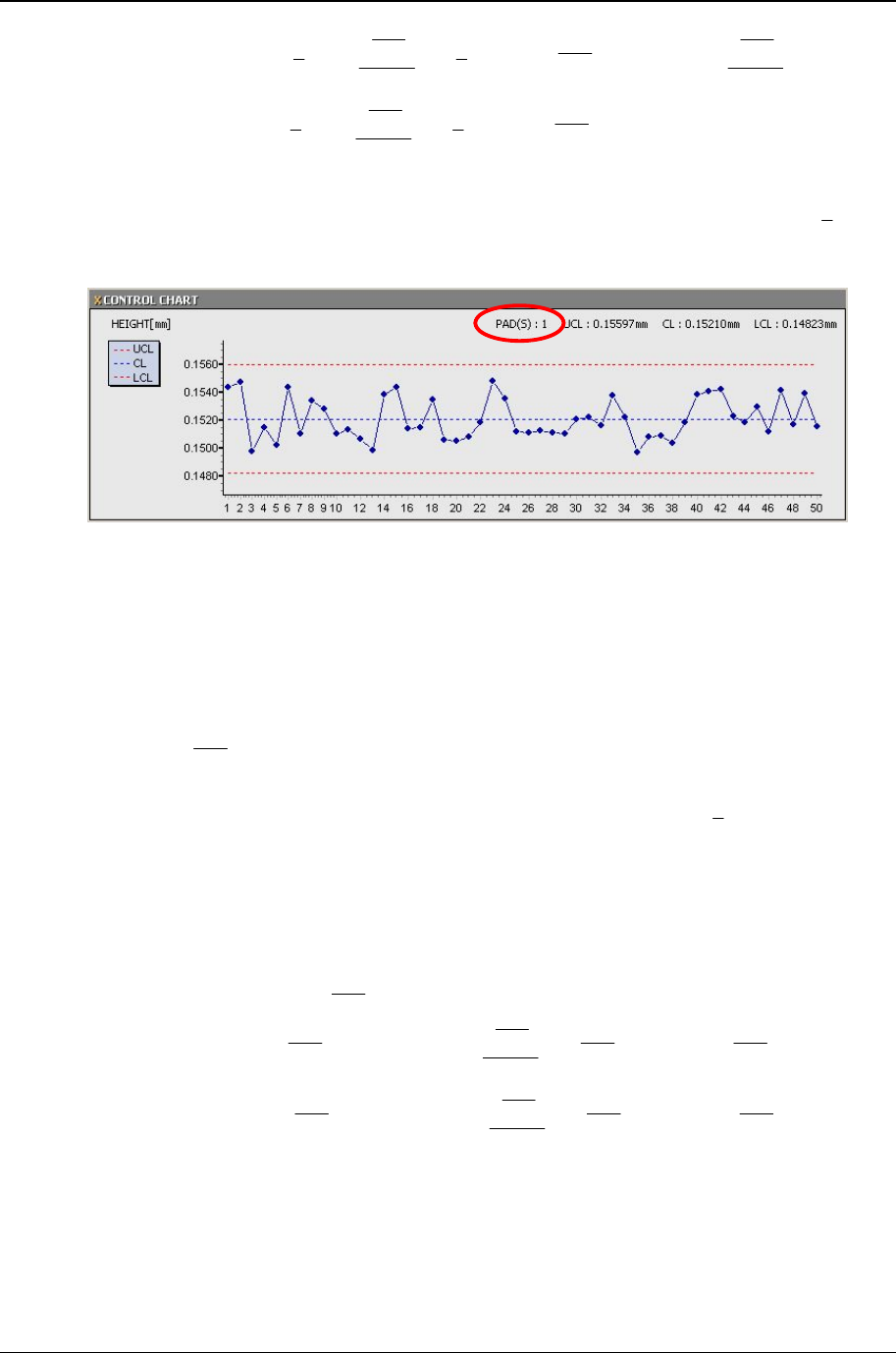
3.6.5 各个的测定值管理图(
x
Control Chart)
各个的测定值管理图是部分群无法形成或无意义时,时使用各个的测定值(
x
)状态管理所使用的管
理图. 在管理图内各个的测定值成为打点, 中心线(Center Line)的各个测定值成为平均(
x
). 选择
的pad一个时显示各个的测定值管理图. 使用各个的测定值管理图时没有各部分群范围值,所以需
要其它统计量. 如下图移动范围(Moving Range)定义.
[表 3-7] 各个的测定值管理图资料构造
番号
1, 2, 3, …
k
平均
测定值
1
x ,
2
x ,
3
x , …
k
x
x
移动范围
2
MR ,
3
MR , …
k
MR
MR
i
MR = ||
1-
-
ii
xx , ki ,...,3,2
=
;
R
M
=
å
=
-
k
i
i
MR
k
2
1
1
i
MR 时两个领据测定值的相差定义, 数量为2时,叫做移动范围(Moving Range).
● CL =
m
=
x
SPCworks 统计软件
SPI HS30
32
REV 1.2
● UCL =
m
+
s
3
=
x
+
)2(
3
2
d
RM
=
x
+ 2.66
R
M
( ∵
s
=
)2(
2
d
RM
)
● LCL =
m
-
s
3
=
x
-
)2(
3
2
d
RM
=
x
- 2.66
R
M
( ∵ 128.1)2(
2
=d )
各个的测定值管理图是用各个测定值的打点, 中心线(Center Line)是各个打点测定值平均(
x
).
[图 3-31] 各个的测定值管理图(
x
Control Chart)
3.6.6 移动范围管理图(MR Control Chart)
移动范围管理图是用部分群分别难或无意义时使用移动范围(Moving Range),管理工程西格玛(
s
)
使用的目的管理图. 在管理图内两个测定值相差的移动范围(MR)成为打点.中心线(Center Line)是
移动范围的平均(
R
M
). 所选择pad一个时,使用移动范围管理图.
注:资料构造是以上各个的测定值管理图(
x
Control Chart)相同. 工程平均(
x
)和工程西格玛(
s
)
同时管理。
pad种类SPC分析时:各个的测定值用移动范围管理图来使用.
● CL = )2(
2
d •
s
=
R
M
● UCL = CL + 3
s
=
R
M
+ 3 • )2(
3
d •
)2(
2
d
RM
=
R
M
+ 2.269 •
R
M
● LCL = CL - 3
s
=
R
M
- 3 • )2(
3
d •
)2(
2
d
RM
=
R
M
- 2.269 •
R
M
= 0
( ∵ 853.0)2(
3
=d , 128.1)2(
2
=d )
移动范围管理图里,管理线是范围管理图(R Control Chart) n = 2 时类似. 在移动范围管理图里
移动范围值不能成为负数,所以LCL值是0来替代.