00196043-05 - SG X und X4I FSE_de.pdf - 第102页
Kommunikation und Steuerung CAN-Bus-Kommunikation mit der Achsansteuerung CAN-Bus Student Guide SIPLACE X-Serie und X4I FSE 102 Übersicht Achsansteuerung
Kommunikation und Steuerung
CAN-Bus CAN-Bus-Kommunikation mit der Achsansteuerung
101 Student Guide SIPLACE X-Serie und X4I FSE
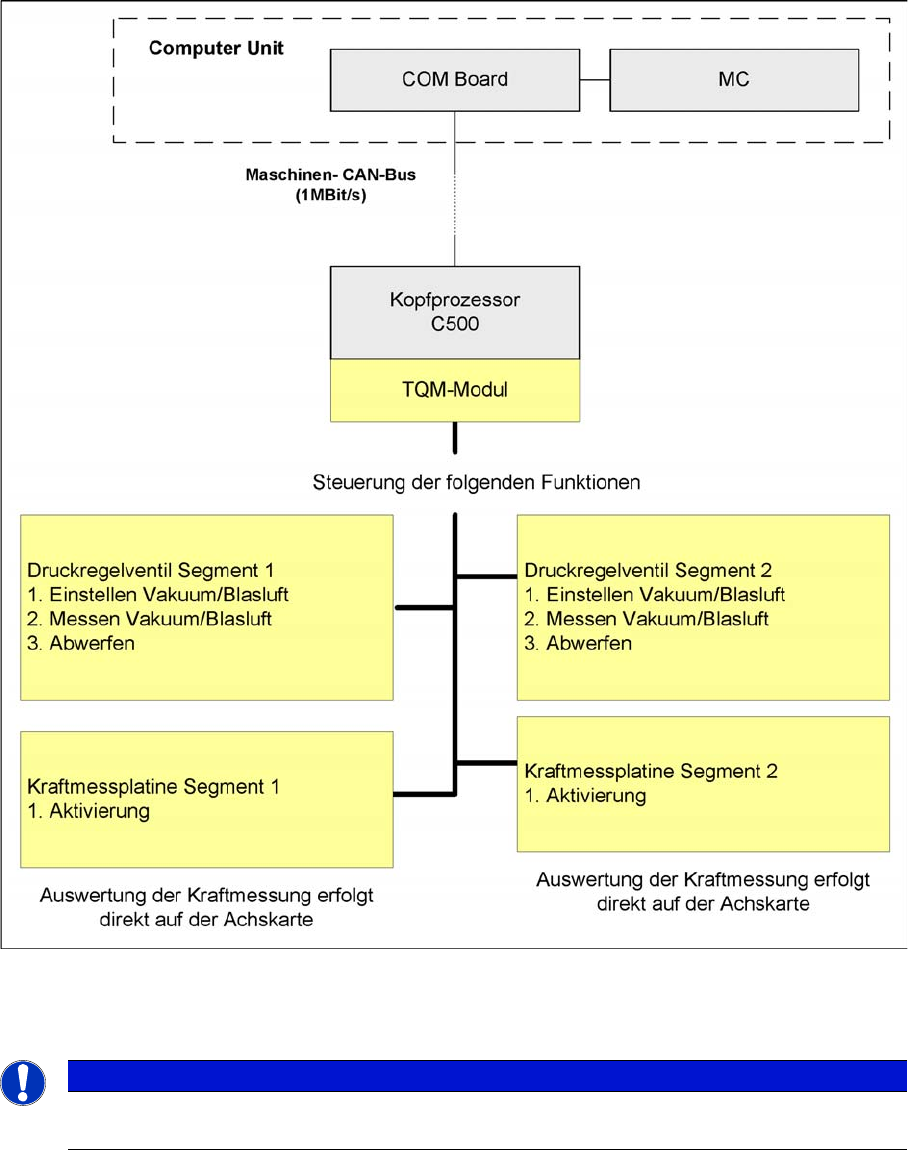
CAN-Bus-gesteuerte Funktionen am TwinHead
4.3.4.3 CAN-Bus-gesteuerte Funktionen am TwinHead
Funktionen CAN-Bus-Prozessorboard am TwinHead
Die CAN-Bus-Prozessor-Platine ist nicht wie bei den HF-Maschinen auf je einem Twin-Segment,
sondern befindet sich jetzt zentral auf der Kopfprozesssorplatine C500.
CAN-Bus-Kommunikation mit der Achsansteuerung
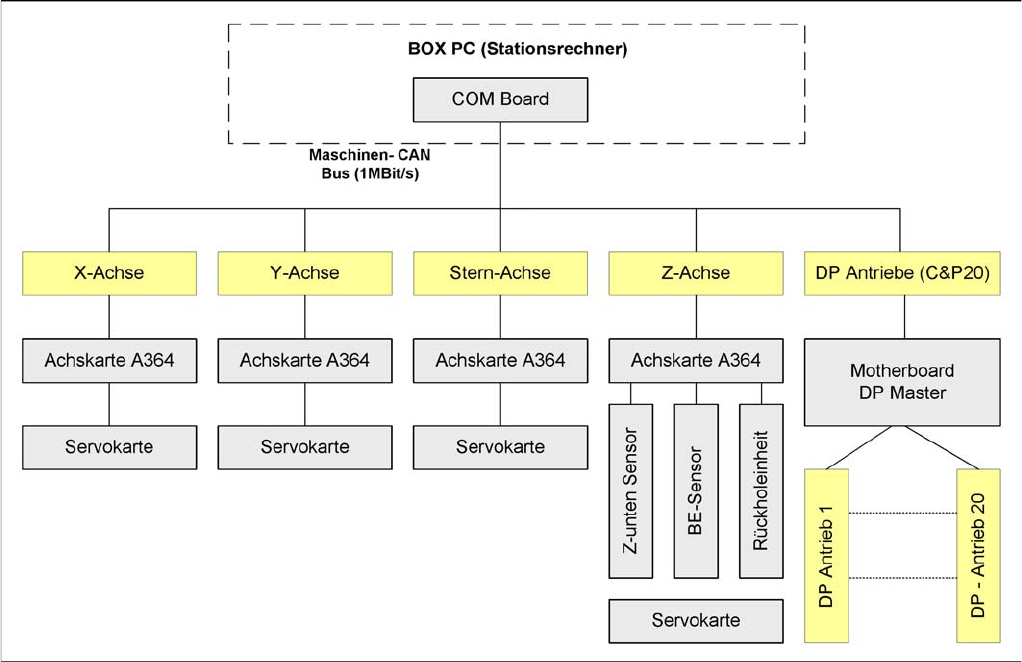
4.3.5 CAN-Bus-Kommunikation mit der Achsansteuerung
Die Kommunikation zwischen den Achssteuerungen erfolgt über den CAN-Bus. Alle zwischen diesen
Modulen ausgetauschten Informationen werden durch den CAN-Bus übertragen (z. B. Achsparameter,
Zielposition, Endesignal, ...).
HINWEIS
Über die 7-Segment-Anzeige wird der Status des 16-Bit-Prozessorboards angezeigt.
Normaler Betriebszustand: "." blinkt. (Beschreibung siehe Abschnitt C&P-Kopf).
Kommunikation und Steuerung
CAN-Bus-Kommunikation mit der Achsansteuerung CAN-Bus
Student Guide SIPLACE X-Serie und X4I FSE 102
Übersicht Achsansteuerung
Kommunikation und Steuerung
CAN-Bus Kommunikation SIPLACE Vision
103 Student Guide SIPLACE X-Serie und X4I FSE
Kommunikation SI PLACE Vision
4.3.6 Kommunikation SIPLACE Vision
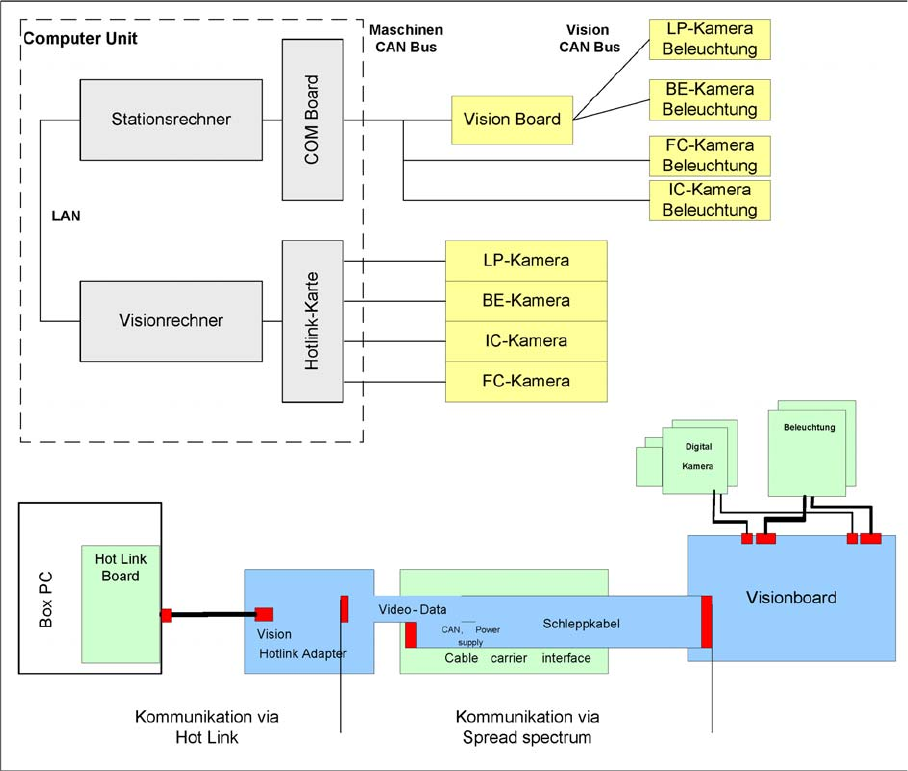
Überblick SIPLACE Vision
Die Kommunikation zwischen den einzelnen Rechnern erfolgt über LAN-Kabel, wobei der
Stationsrechner das Kommando zur Bildaufnahme an den Visionrechner sendet und das Resultat der
Messung empfängt. Weiterhin schickt der Stationsrechner die Beleuchtungswerte der entsprechenden
Gehäuseformen. Die aufgenommenen Bilder werden digital über das Visionboard zum Hotlink-Adapter
via Spread-Spektrum übertragen und dann über die Hotlink-Verbindung zum Visionrechner geschickt
und ausgewertet. Das Ergebnis wird zum Stationsrechner gesendet.
Kommunik ation während einer Bildaufn ahme
4.3.6.1 Kommunikation während einer Bildaufnahme
Die wichtigste Kommunikation zwischen dem Visionsystem und dem Stationsrechner ist die
Übertragung der Beleuchtungswerte. Diese im GF gespeicherten Werte werden über den CAN-Bus an
die betreffende Kamera geschickt. Soll die Kamera das Bild aufnehmen, wird die Kamera durch einen
Trigger aktiviert. Ab diesem Moment leuchten die jeweiligen LED-Reihen der verschiedenen
Beleuchtungsstufen, abhängig vom Beleuchtungswert. Dieser kann die Werte 0 = dunkel bis 255 = hell
annehmen. Alle Beleuchtungsstufen beginnen im gleichen Augenblick zu leuchten. Der Wert 0-255
bestimmt die Dauer der Beleuchtungszeit.
Die maximale Dauer der Beleuchtung ist beschränkt auf 6 ms.