SM481_Introduction(Chi_Ver1).pdf - 第49页
2-9 设备的规格 2.6. PCB 规格 2.6.1. PCB 的规格, 弯曲允许误差 O: 标准 , ◎ : Factory Option, X: 适用 不 可 表 2.1 PCB 规格 区分 规 格 SM481 备 注 PCB 的 最大尺寸 (L)460mm x (W)400mm O (L)510mm x (W)460mm ◎ (L)610mm x (W)460mm ◎ (L)610mm x (W)510mm ◎ (L)660mm…
2-8
Samsung Component Placer SM481 Introduction
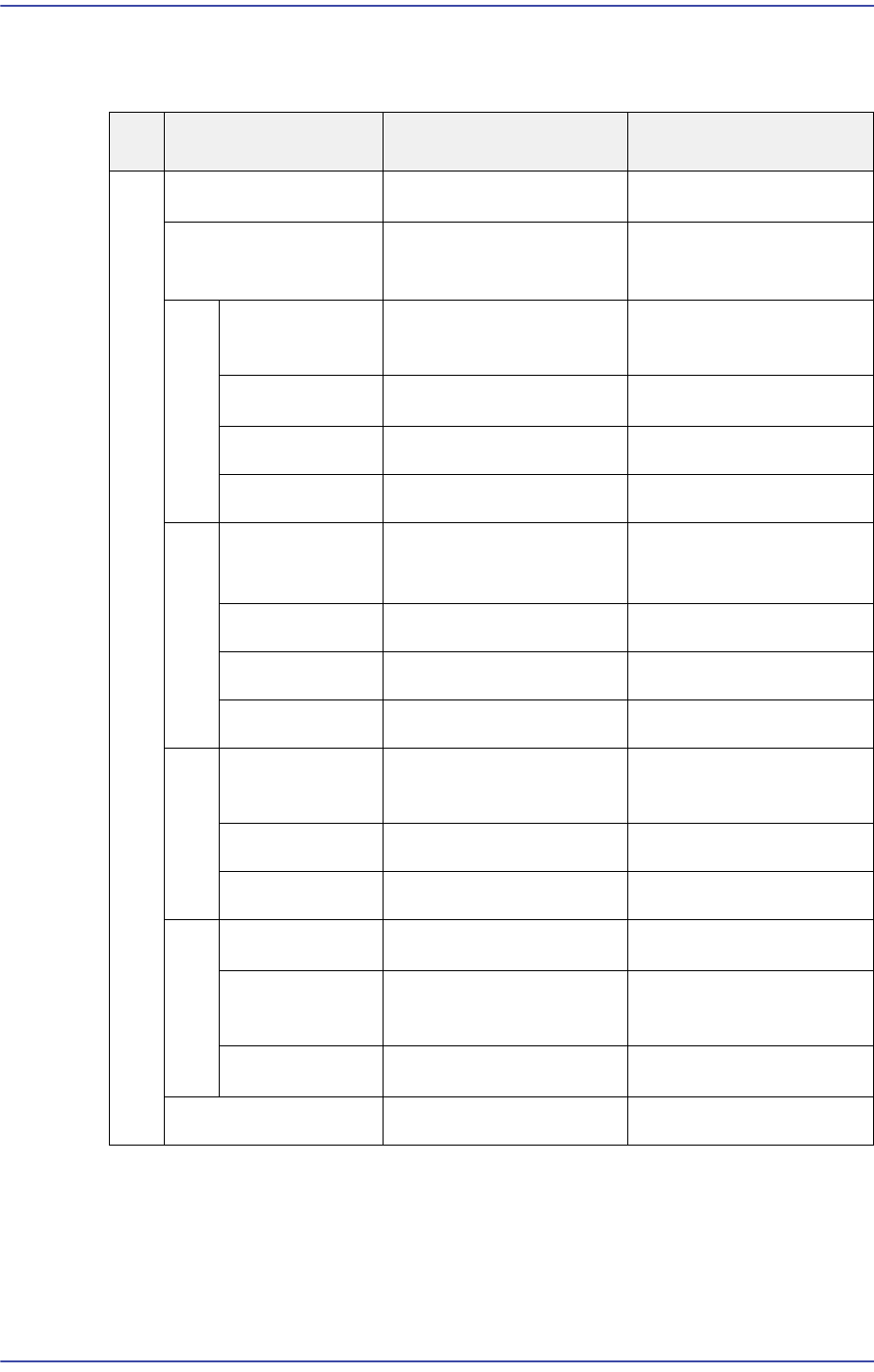
2.5. Head的规格
表
2.1 Head
的规格
区分
项 目 规 格 备 注
Head
SPINDLE
10
Head 的间距 15 mm
8mm, 12mm, 16mm 吸
着可能的程度
Z轴
机械装置
AC Servo motor + Belt &
LM
Motor: 20W
动作范围
最大 88 mm
Stopper to stopper
移动精度
0.003 mm/pulse
反复精度
± 0.01 mm
R轴
机械装置
Micro stepping motor +
Belt & Pulley
Head 1/2, 3/4, 5/6, 7/8,
9/10 Pair
动作范围
Unlimited
移动精度
0.018 °/pulse
反复精度
± 0.05 °
Swing Mirror
机械装置
AC servo motor + Belt &
Cam
Motor: 50 W
移动精度
0.018˚/pulse
反复精度
±0.02˚
Nozzle holder
Clamping 方法
Taper clamp + Ball
Clamping ball
的数
3 个
Cushion
没有Cushion Nozzle Cushion 设置
识别方法
Fly Camera (CCD)
安装数码照明装置
2-9
设备的规格
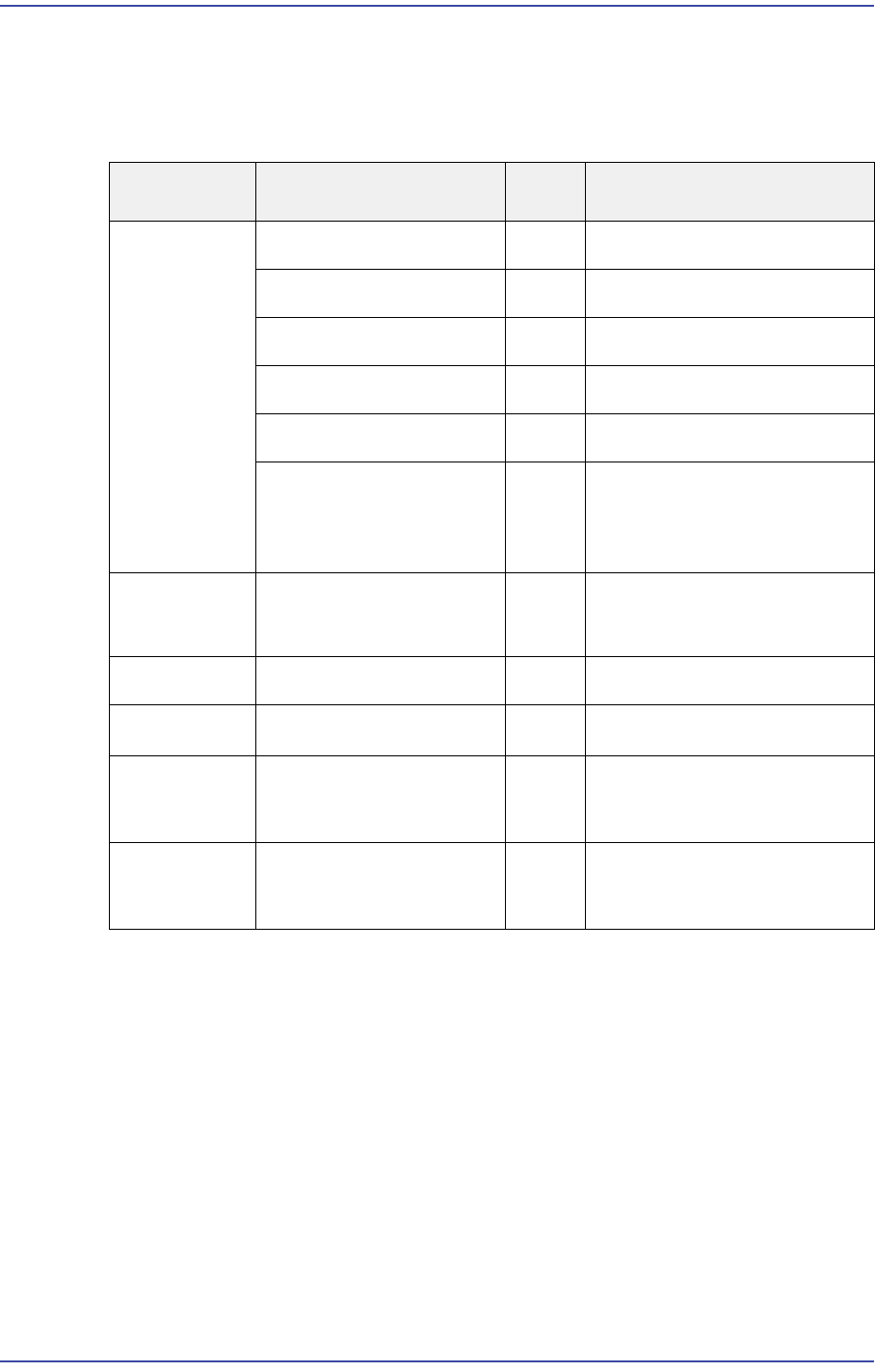
2.6. PCB 规格
2.6.1. PCB的规格,弯曲允许误差
O: 标准, ◎: Factory Option, X: 适用不可
表
2.1 PCB
规格
区分
规 格
SM481
备 注
PCB 的
最大尺寸
(L)460mm x (W)400mm O
(L)510mm x (W)460mm
◎
(L)610mm x (W)460mm
◎
(L)610mm x (W)510mm
◎
(L)660mm x (W)460mm
◎
(L)740mm x (W)460mm
◎
阻挡器(Stopper)的移动及出/
入口延长、不得使用 Side
Tray。
PCB 的
最小尺寸
(L)50mm x (W)40mm
O
厚度
0.38 mm ~ 4.2 mm
移送可能PCB
2.0 Kg
允许弯曲度
公差
(上):0.5mm
(下):1.5mm
部件上下对应
(上):15mm
(下):30mm
会随着感应器的位置而稍有不
同。
2-10
Samsung Component Placer SM481 Introduction
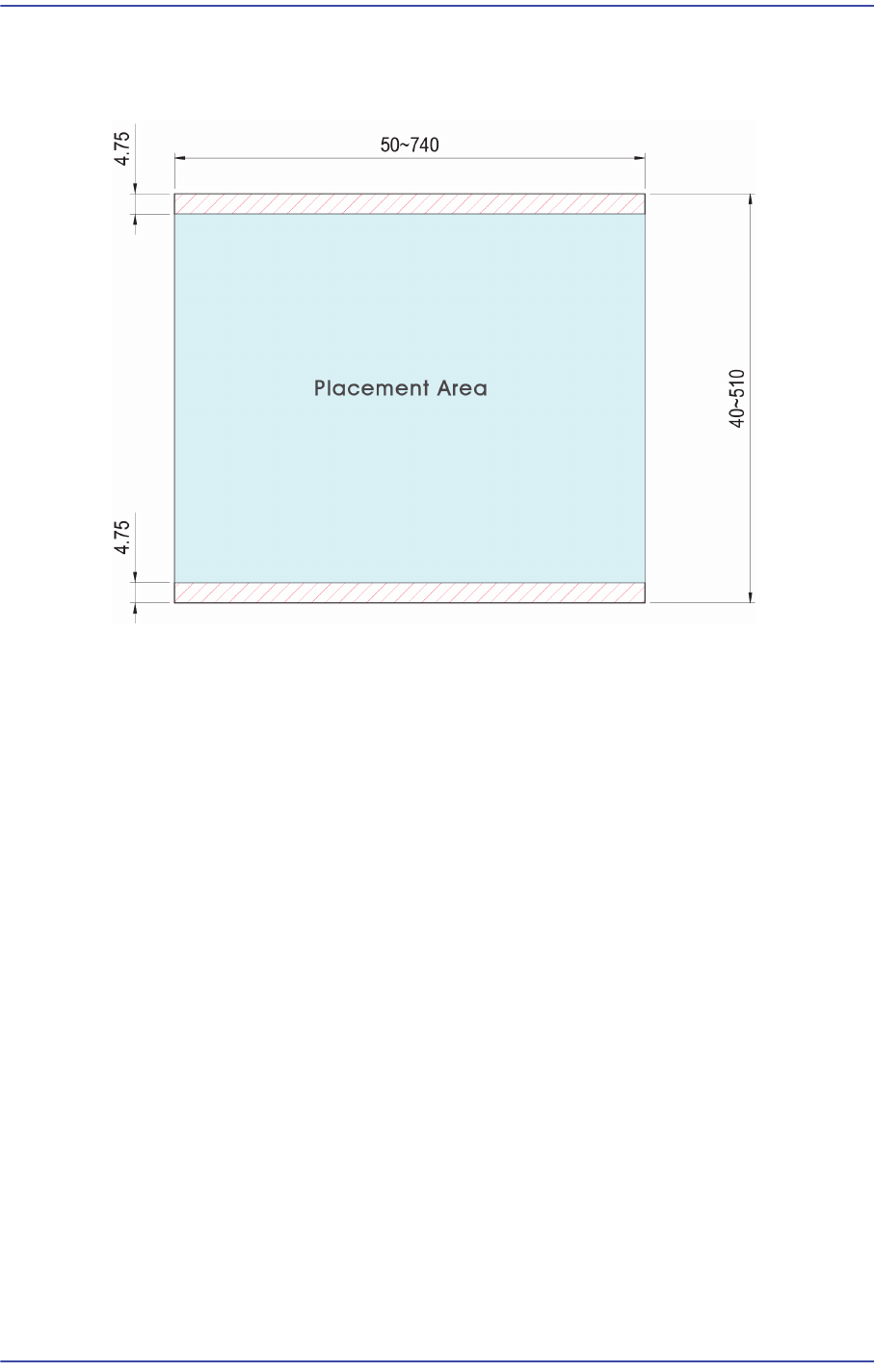
2.6.2. PCB的条件
图
2.1 PCB
的条件
在夹住PCB的两个边缘有4.75mm宽的剩余空间。PCB的上面剩余空间为 15mm,下
面的空间为 30mm。PCB 用132.3mm高的后退顶杆(Back Up Pin)来 支 撑 。
PCB用132.3mm 高的后退顶杆(Back Up Pin)来 支 撑 。
PCB固定方法
基本上都用定位销来固定PCB。还有一种是从PCB的 两个侧面夹住的” 外壳固
定方法”,它只是当选项来使用。
PCB的移送方向和位置固定销的位置
PCB移送方向可以是从左到右,也可以是从右到左。这个移送方向最好不要由
使用者自己更改,请向我公司请求协助。