TM1629_TM1630_TM1631.The explanation document of the parameters on simplified GUI.pdf - 第13页
SMT Software Engineering Group IM Operations Y AMAHA MOT OR CO.,L TD MDOC-SO FT50035 13/34 6. Flip Chip 6.1. S imple High Speed Suitable for com ponents with random ly arrayed balls. A ball infor m ation …
SMT Software Engineering Group
IM Operations
YAMAHA MOTOR CO.,LTD
MDOC-SOFT50035
12/34
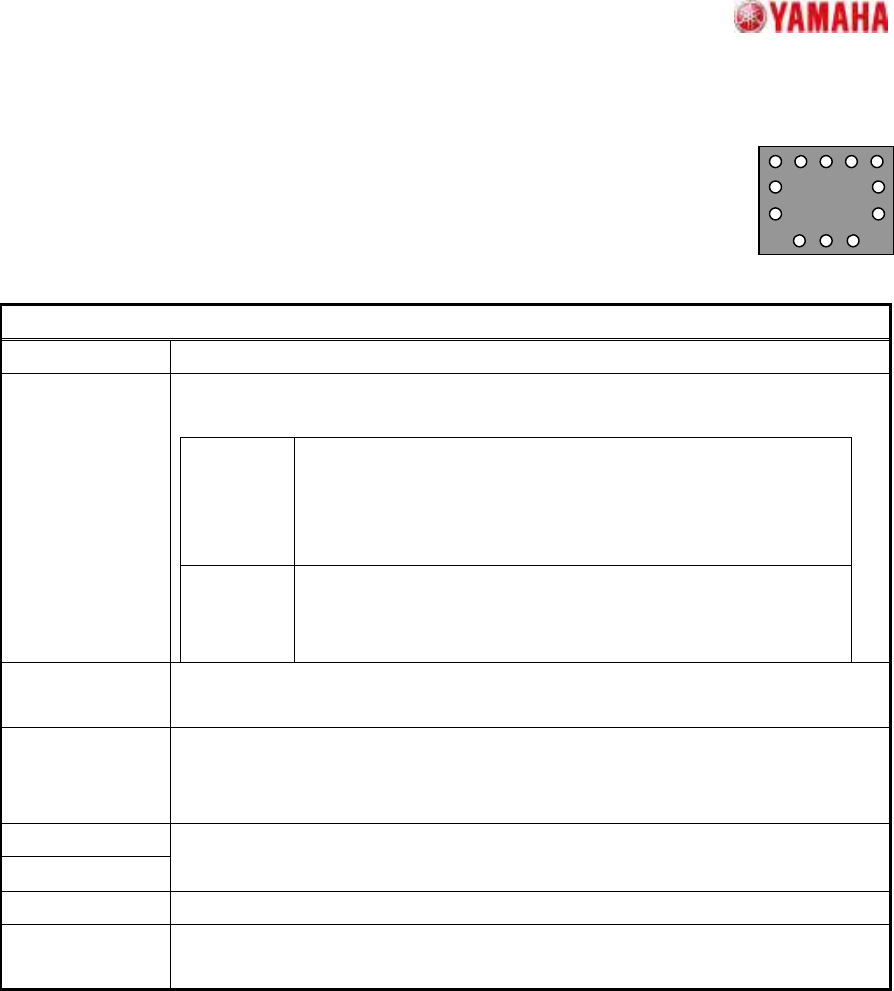
5. Simple Flip Chip
5.1. Outside Bump Recognition
Suitable for simple-setting based recognition using only the outer perimeter
balls at components where the ball pitch is uniform at each side.
Particular parameters
Check Pitch It is specified whether a strict pitch check is performed.
Method of Auto
Binarize
The method of binarizing is specified. This parameter is effective only when the
threshold is 0.
Brightness
Distinction
It searches for the threshold which improves separation of
white and black most automatically. It is suitable when the
brightness difference between a ball section and a base
section is big.
Area Size
Distinction
A threshold is determined that the area judged as white equal
to the area defined as balls. It is suitable when there is
nothing to reflect in addition to balls.
Check Bump
Position
It is specified whether gap between the defined bump position and the detected
bump position is checked.
Retry Trace In "On", it re-looks for the detection failure bumps based on the information of
the bumps which succeeded in detection. If "On", the recognition rate of low
contrast components may improve.
Cut Outer Noise
Cut Inner Noise
The amount of application of the noise cut is specified. In order to add
processing to the image, if it applies too much, quality of image will deteriorate.
Object Type It is specified whether an object is “White” or “Black”.
Noise Cut Order
The execution order of noise cuts is specified. Generally, the influence of what is
performed previously is big.
SMT Software Engineering Group
IM Operations
YAMAHA MOTOR CO.,LTD
MDOC-SOFT50035
13/34
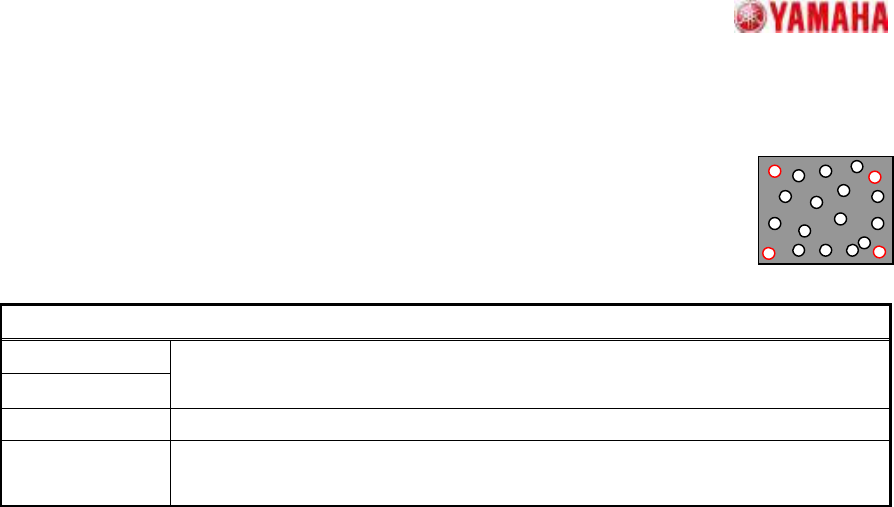
6. Flip Chip
6.1. Simple High Speed
Suitable for components with randomly arrayed balls.
A ball information setting is required which includes at least 2 reference ball
pairs (near 4 corners). Ball detection occurs by contour tracing.
Particular parameters
Cut Outer Noise
Cut Inner Noise
The amount of application of the noise cut is specified. In order to add
processing to the image, if it applies too much, quality of image will deteriorate.
Object Type It is specified whether an object is “White” or “Black”.
Noise Cut Order
The execution order of noise cuts is specified. Generally, the influence of what is
performed previously is large.
SMT Software Engineering Group
IM Operations
YAMAHA MOTOR CO.,LTD
MDOC-SOFT50035
14/34
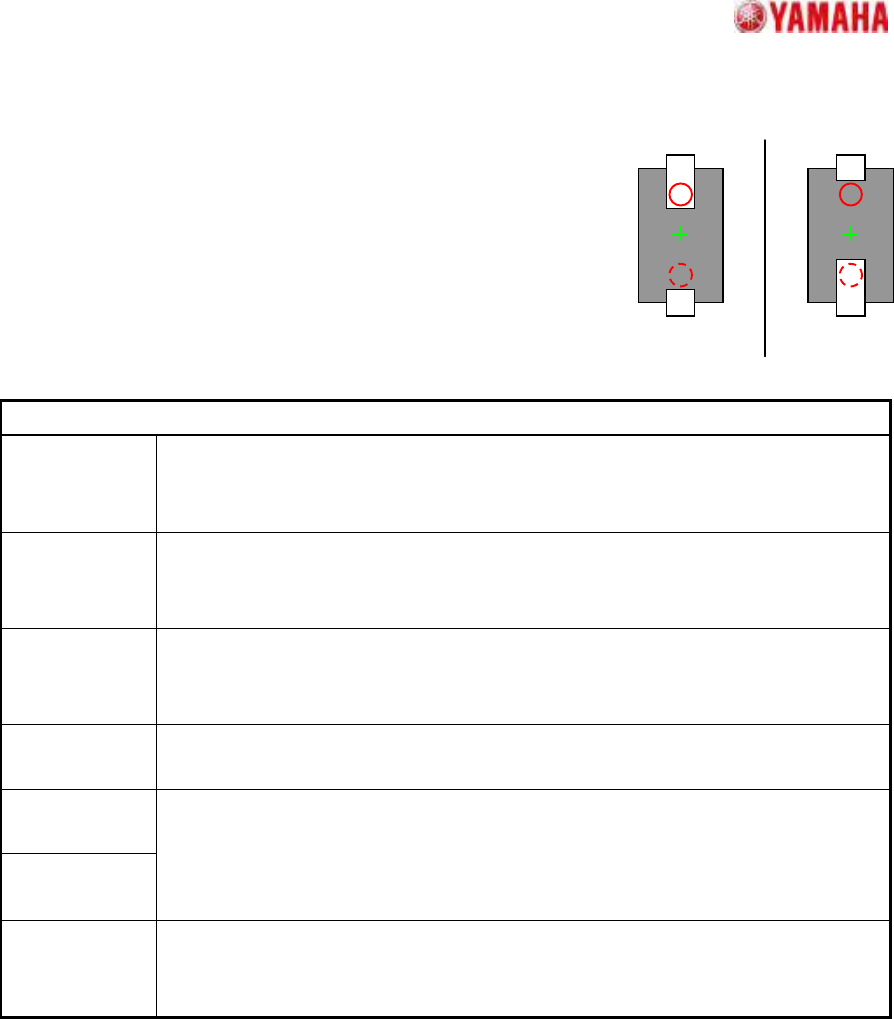
7. 2Ends
7.1. Check Direction
Suitable for determining the direction of components with 2 leads,
such as 2-terminal diodes.
A direction judgment is made by comparing the average
brightness of the specified circle area with a 180 degrees opposing
circle area. Suitable where a polarity mark, etc., exists on the
recognition face.
Particular parameters
Check Type When it is expected that the brightness of the specified circle will be brighter than
the brightness of a rotation symmetry position, “White” is specified. Else “Black” is
specified.
Check
Direction
The direction at which a direction judging is performed is specified.
In distinguishing 0 and 180 degrees, “2 Angle” is specified. In distinguishing 0, 90,
180, and 270 degrees, “4 Angle” is specified.
Min.
Brightness
Difference
The difference in the average brightness of detection circles being checked in
order to differentiate the directions must be larger than this value, or an error will
occur. If 0, 50 will be set.
Direction Mark
Diameter (mm)
The diameter of the circle where brightness is measured is specified.
Direction Mark
Center X
Direction Mark
Center Y
The center position of the circle where brightness is measured is specified.
(Origin: The component center)
Check Many
Adsorption
It confirms whether excessive components exist. When the “Check” is specified, it
becomes an error if excessive edges exist around the detected component.
*Cannot use this parameter on VGOS V2.xx and YGOS V2.xx.
+0
゚
+180