TM1629_TM1630_TM1631.The explanation document of the parameters on simplified GUI.pdf - 第32页
SMT Software Engineering Group IM Operations Y AMAHA MOT OR CO.,L TD MDOC-SO FT50035 32/34 14.2. Shi eld Frame Suitable for shie ld compon ents. The c omponent angl e is the t ilt of the dominant s traig …
SMT Software Engineering Group
IM Operations
YAMAHA MOTOR CO.,LTD
MDOC-SOFT50035
31/34
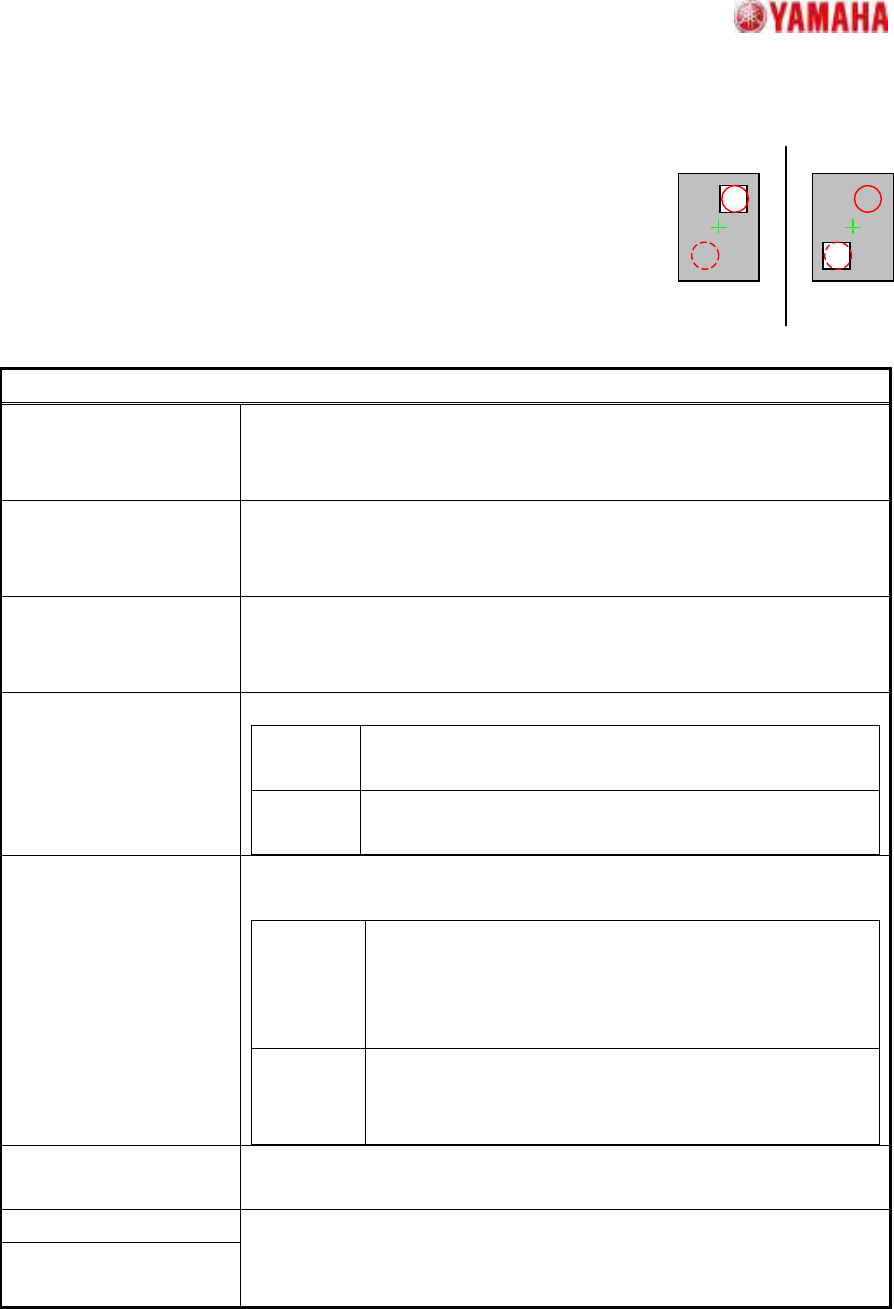
+0 ゚ +180 ゚
14. Sp. Quad
14.1. Check Direction
Suitable for determining the direction of rectangular components.
A direction judgment is made by comparing the average brightness of
the specified circle area with a 180 degrees opposing circle area.
Suitable where a polarity mark, etc., exists on the recognition face.
Particular parameters
Check Type When it is expected that the brightness of the specified circle will be
brighter than the brightness of a rotation symmetry position, “White” is
specified. Else “Black” is specified.
Check Direction The direction at which a direction judging is performed is specified.
In distinguishing 0 and 180 degrees, “2 Angle” is specified. In
distinguishing 0, 90, 180, and 270 degrees, “4 Angle” is specified.
Min. Brightness
Difference
The difference in the average brightness of detection circles being
checked in order to differentiate the directions must be larger than this
value, or an error will occur. If 0, 50 will be set.
Center Detection
Algorithm
The calculation method of the component center is specified.
Center of
Gravity
The center-of-gravity of the detected contour.
Apex of
Rectangle
The center of the rectangle which consists of detected
lines.
Method of Auto Binarize The method of binarizing is specified. This parameter is effective only
when the threshold is 0.
Brightness
Distinction
It searches for the threshold which improves separation
of white and black most automatically. It is suitable when
the brightness difference of a terminal section and a
base section is big.
Area Size
Distinction
A threshold is determined that the area judged as white
equal to the area defined as terminals. It is suitable
when there is nothing to reflect in addition to terminals.
Direction Mark Diameter
(mm)
The diameter of the circle where brightness is measured is specified.
Direction Mark Center X
Direction Mark Center Y
The center position of the circle where brightness is measured is
specified.
(Origin: The component center)
SMT Software Engineering Group
IM Operations
YAMAHA MOTOR CO.,LTD
MDOC-SOFT50035
32/34
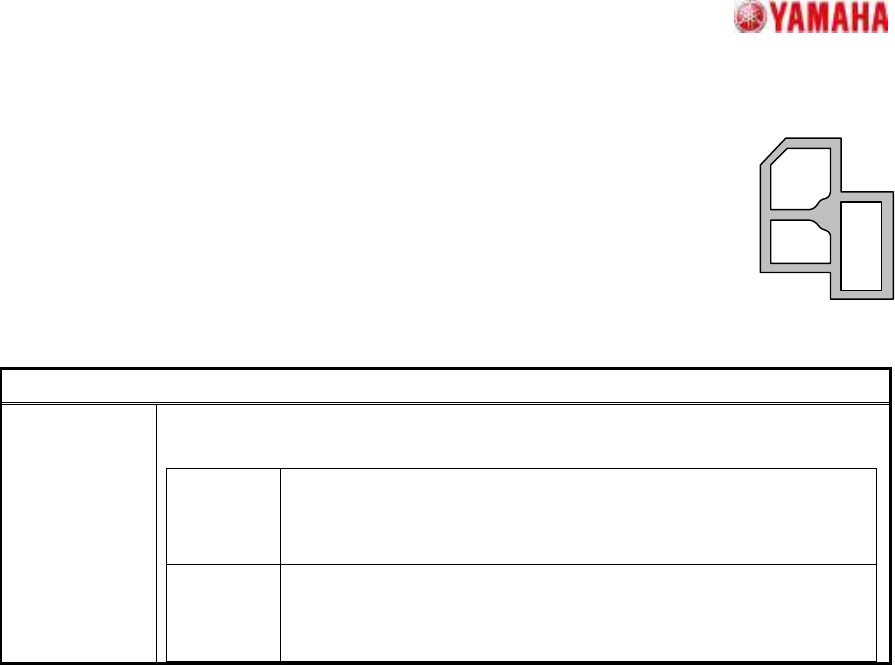
14.2. Shield Frame
Suitable for shield components.
The component angle is the tilt of the dominant straight lines that form the
component contour, and the component center is the center of that angle's
circumscribed rectangle. The outer contour comprises mostly horizontal and
vertical straight lines, and all the resulting component contours must be
connected.
Particular parameter
Method of Auto
Binarize
The method of binarizing is specified. This parameter is effective only when the
threshold is 0.
Brightness
Distinction
It searches for the threshold which improves separation of white
and black most automatically. It is suitable when the brightness
difference of an object and background is big.
Area Size
Distinction
A threshold is determined that the area judged as white equal to
the area defined as balls. It is suitable when there is nothing to
reflect in addition to an object.
SMT Software Engineering Group
IM Operations
YAMAHA MOTOR CO.,LTD
MDOC-SOFT50035
33/34
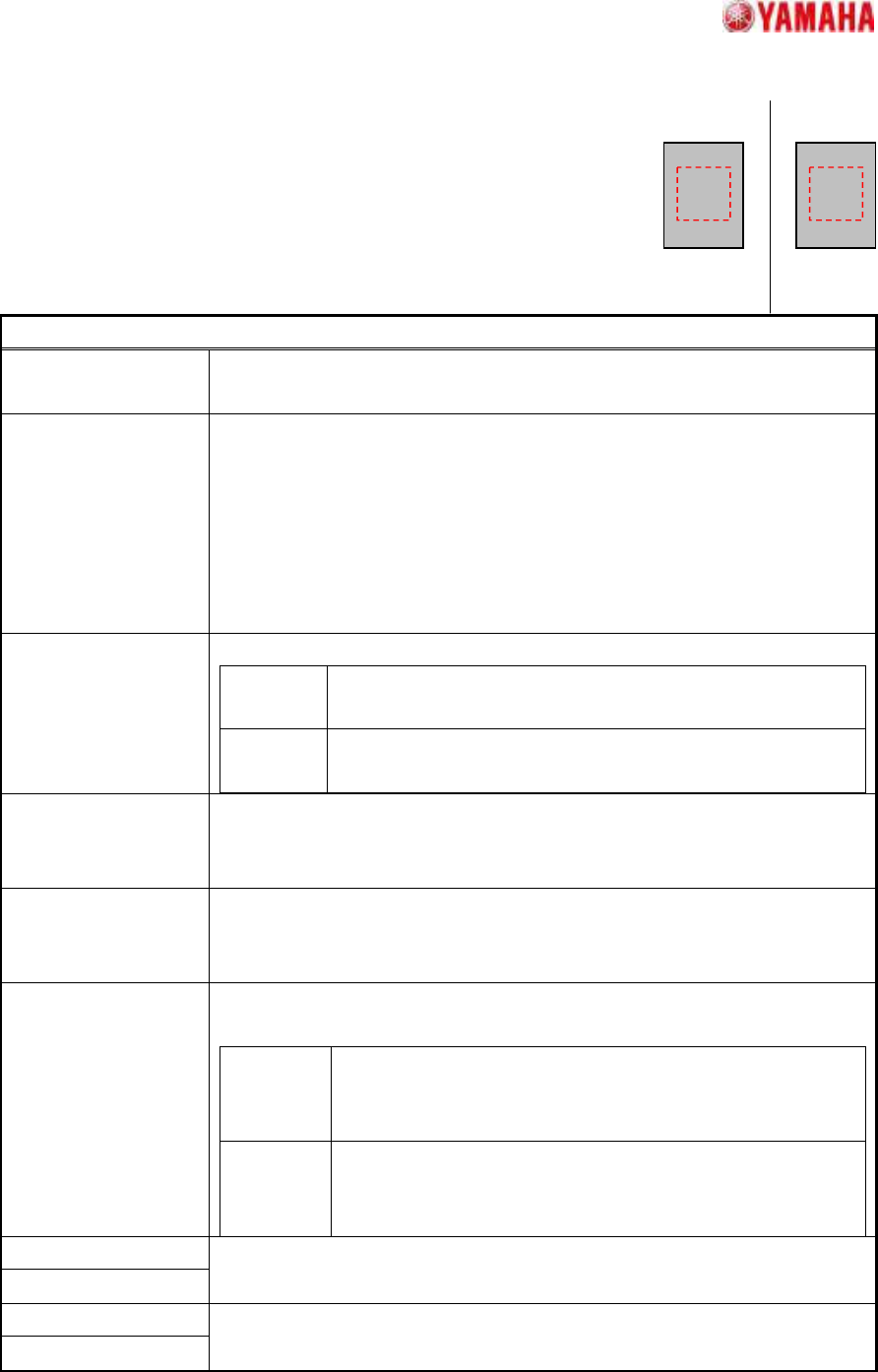
OK NG
A
14.3. Check Upside-Down
Suitable for top/bottom judgments at rectangular components.
The component top/bottom judgment occurs by checking the
brightness variation (dispersion) at the specified judgment area.
Particular parameters
Threshold of 3-sigma
The threshold of the brightness variation for check is specified. The value
specified here is compared with the brightness variation in the check area.
Threshold of Average
Usually, “0” is specified. A superfluous judging may be prevented by setting
up values other than “0”. When a value other than “0” is set up, It becomes
an error when the following three conditions are fulfilled.
1. “Dispersion” is specified as “NG Condition”.
2. The brightness variation in the check area is over the value specified
as “Threshold of 3-sigma”.
3. The average brightness in the check area is larger than this.
Center Detection
Algorithm
The calculation method of the component center is specified.
Center of
Gravity
The center-of-gravity of the detected contour.
Apex of
Rectangle
The center of the rectangle which consists of detected lines.
Check-area Offset
Enable
When “Enable” is specified, the check area is moved according to the value
specified as “Check-area Offset”. When “Disable” is specified, the check
area is set as the center of the component.
NG Condition When “Dispersion” is specified, it becomes an error when the measured
value is larger than the value specified as “Threshold of 3-sigma”
parameter. In the case of “Non Dispersion”, it becomes the contrary.
Method of Auto
Binarize
The method of binarizing is specified. This parameter is effective only when
the threshold is 0.
Brightness
Distinction
It searches for the threshold which improves separation of
white and black most automatically. It is suitable when the
brightness difference of an object and background is big.
Area Size
Distinction
A threshold is determined that the area judged as white
equal to the area defined as balls. It is suitable when there
is nothing to reflect in addition to an object.
Check-area Size X
Check-area Size Y
The size of the check area is specified.
Check-area Offset X
Check-area Offset Y
Offset of the check area is specified.
(Origin: The component center)