NPM_SupplementToRecognitionSetting_C_15识别设定补充资料.pdf - 第29页
Page 29 4 - 7. 3D 传感器固有 的识别错误 : QFP , SOP 使用 3D 传感器时,根据识别错误种类的不同处理 方法也不同。 错误代码 ANS 原因 对策 46 (1 ~ 4) 引线浮起 请确认元件 46 (11) 元件离传感器太远 有大于或等于 0.5mm 的高引线 请确认元件 重新查看元件高度 46 (12) 元件离传感器太近 有大于或等于 0.5mm 的低引线 请确认元件 重新查看元件高度 46 (13) 元…
Page 28
4 - 6. 贴装偏移 (X、Y偏移 小)
例) 贴装位置经常 向相同方向定量偏移。
<对策>
更改识别数据的形状数据
<数据输入方法>
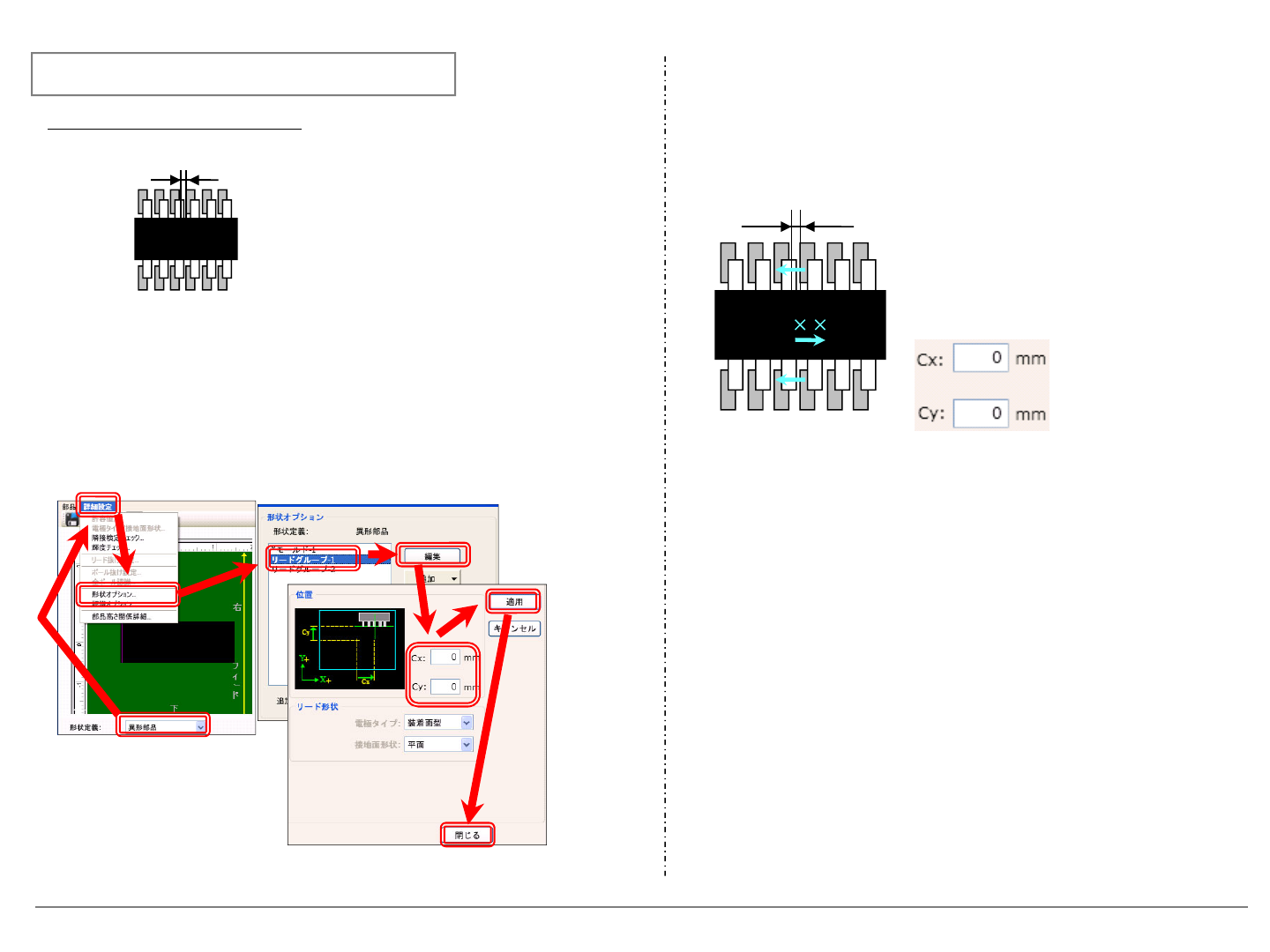
在DGS、LWS的识别数据编辑画面中选择
[异形元件] - [详细设定] - [形状选项] - [形状选择] - [编辑] -
[输入Cx,Cy] - [应用] - [关闭]。
只用在形状选项中按照贴装偏移的量进行挪动的话,就可使贴装位置吻合。
<备注>
1. 需要更改全部登录的形状选项。
2. 输入的值是进行0度贴装时的值。进行 90度贴装时,
在X中输入的值为设备的Y方向的偏移量。
引线组
Cx: 从元件中心X到引线组的中心
X之间的距离
Cy: 从元件中心Y到引线组的中心
Y之间的距离
以左图为例
在Cx输入-1 mm 的话,贴装位置就会
偏移 -1 mm
4. 有关识别的疑难问题解答例
Page 29
4 - 7. 3D传感器固有的识别错误: QFP, SOP
使用3D传感器时,根据识别错误种类的不同处理方法也不同。
错误代码
ANS
原因 对策
46 (1~4)
引线浮起 请确认元件
46 (11)
元件离传感器太远
有大于或等于 0.5mm 的高引线
请确认元件
重新查看元件高度
46 (12)
元件离传感器太近
有大于或等于 0.5mm 的低引线
请确认元件
重新查看元件高度
46 (13)
元件不是水平状态
0.5 mm 的两侧有引线
重新查看吸着状态
36 (10~13)
引线根数错误 请确认元件
一般根据以上的方法处理,根据元件的不同有时需要调整3D的感度。
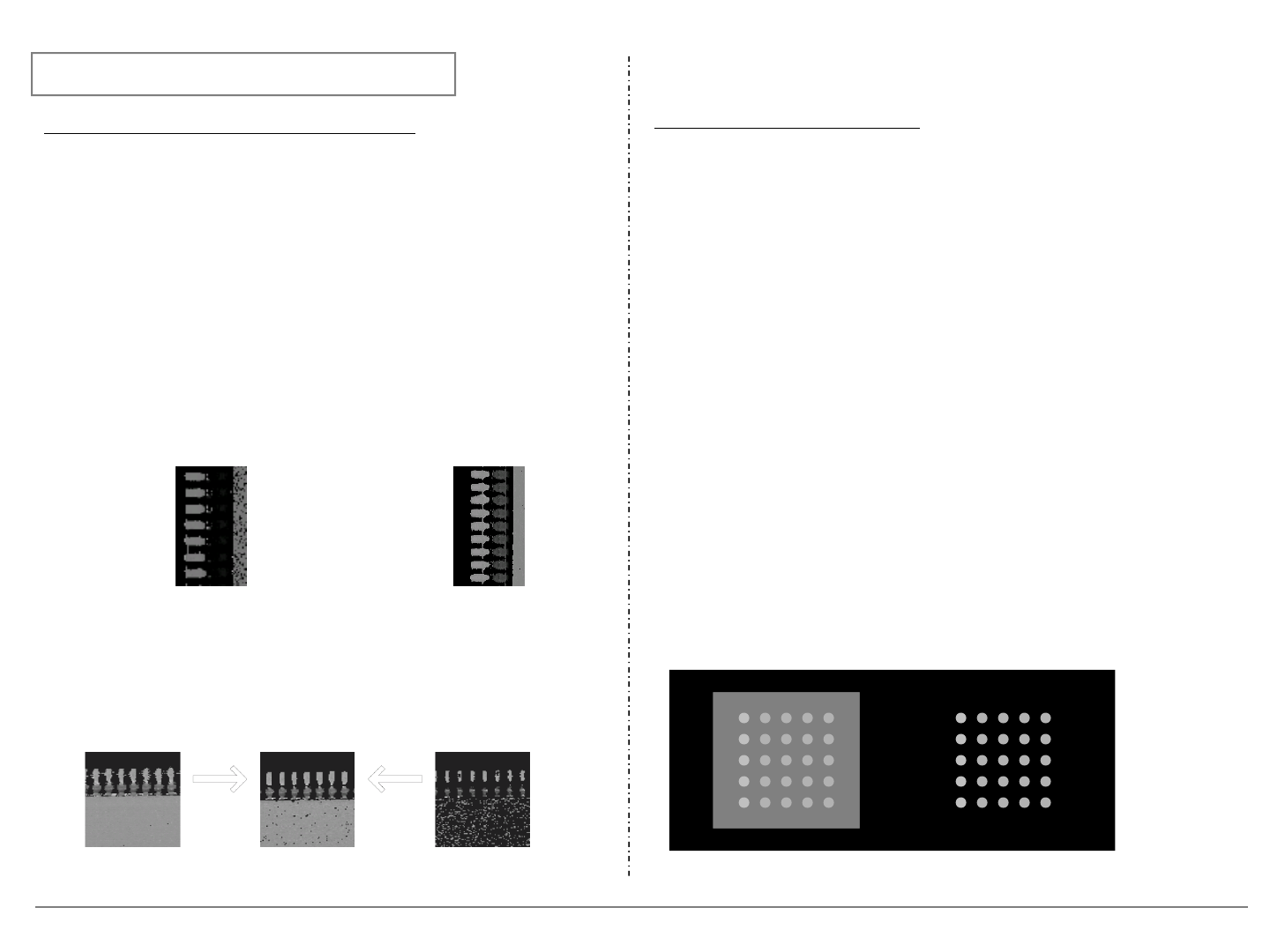
3D感度不适时高度图像的特征:
・感度太低时 引线的中央有洞(上下边比较多)
・感度太高时 引线太粗、引线(左右引线)之间超出图像轮廓
这些都是与物理性状相异的形状。
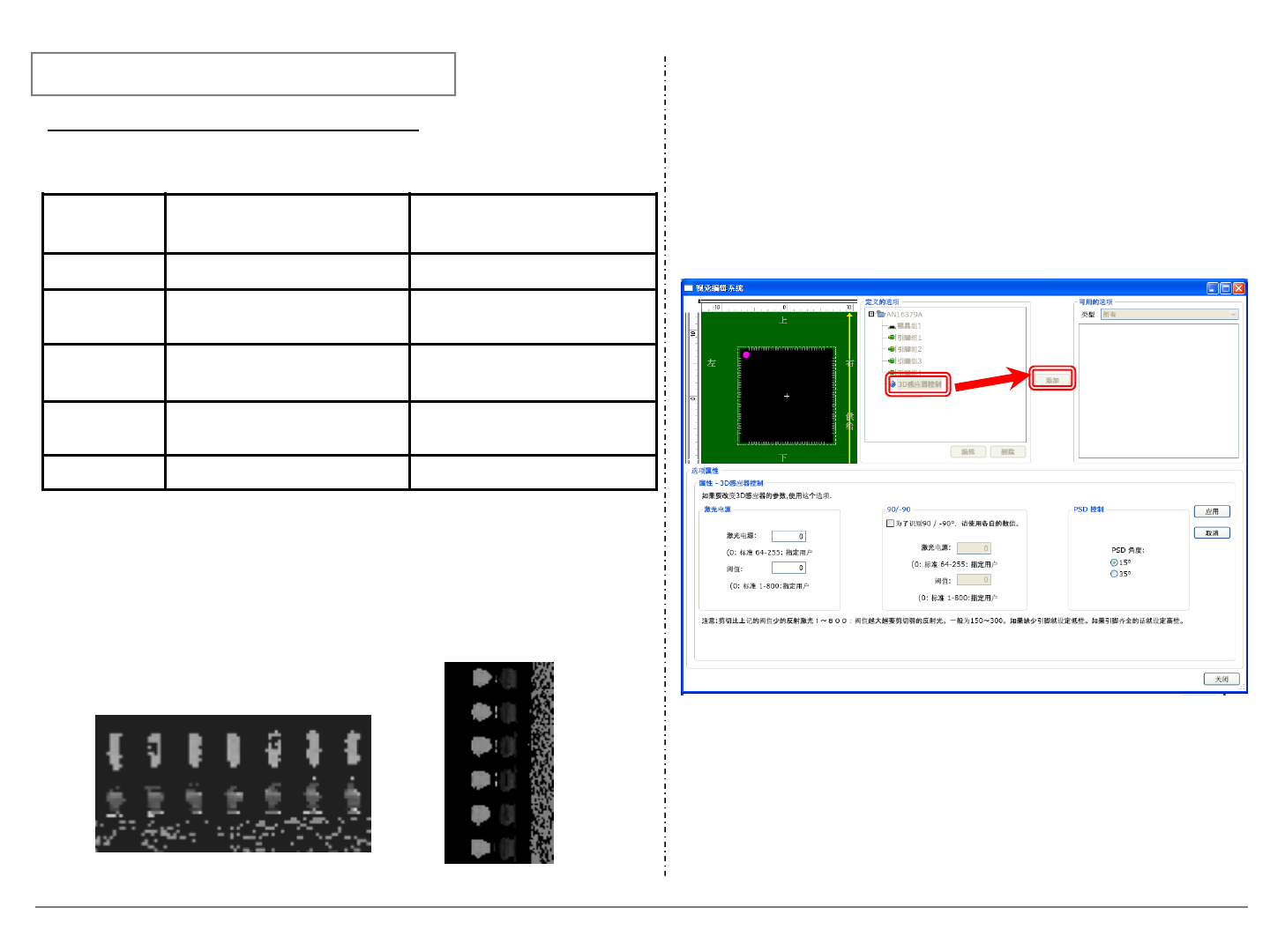
即使元件良好仍然出现识别错误时,
有时可通过添加「3D传感器控制」的方法来解决。
预先在DGS, LWS上添加「3D传感器控制」,
通过机器的示教进行实物调整。
本页的内容是属于选购单元: 3D传感器固有的信息
4. 有关识别的疑难问题解答例
Page 30
4 - 7. 3D传感器固有的识别错误: QFP, SOP
<关于机器中的 「3D传感器控制」 的调整方法>
从机器示教画面,
按激光能量 ⇒ 光量下限值的顺序设定。
在3D传感器的内部构造上,元件的 0度和 180度的图像很相似,
但90等和270度的图像与 0度的图像有时是相异的,
此时,可使用 90度和 270度的设定值。
・激光能量
通常,使用默认值192。
但是,在左右引线的高度测量区(离引线前端 0.4 mm左右)
发现有拉丝时,下调到 128等,使高度测量区的延长上
不要出现拉丝。
4 - 8. 3D固有的识别错误(BGA)
・球高度必须要大于或等于 0.25mm。比须为半球型。
・偶尔发生的元件全体弯曲,会引起全部球检查错误发生。
此种情况不属于3D传感器的异常。
此外,虽然在线性传感器的检测中会是OK的状态,但不能检测
出弯曲状态。
・元件良好时,与QFP相同,预先在NPM-DGS, LWS上添加
「3D传感器控制」,通过机器的示教进行实物调整。
<关于机器中的 「3D传感器控制」 的调整方法>
从机器示教画面设定。
・激光能量
使用默认值192 。
・光量下限值
调整出球和元件体全体的高度。
大约为70前后的值(A)。
此外,把光量下限值调整为接近800的较大值,
可调整到只有球的高度图像的话即可识别(B)。
但如果看到球之间的布线图或者是球顶有黑点时,不可使用该方法。
(A) (B)
高度测量区的延长上有拉丝
需要调整激光能量
高度测量区外有拉丝
不需要调整激光能量
・光量下限值
调整到与高度测量区的引线的物理性状相同。
对于QFP元件,上下引线和左右引线需要同时调整。
其中任何一个有异常状态的话,都无法进行3D识别。
4. 有关识别的疑难问题解答例
本页的内容是属于选购单元: 3D传感器固有的信息
引线之间连起来了
提高光量
下限值
降低光量
下限值
合适的图像
引线内侧有缺欠、
缺损