节卡协作机器人目录.pdf - 第12页
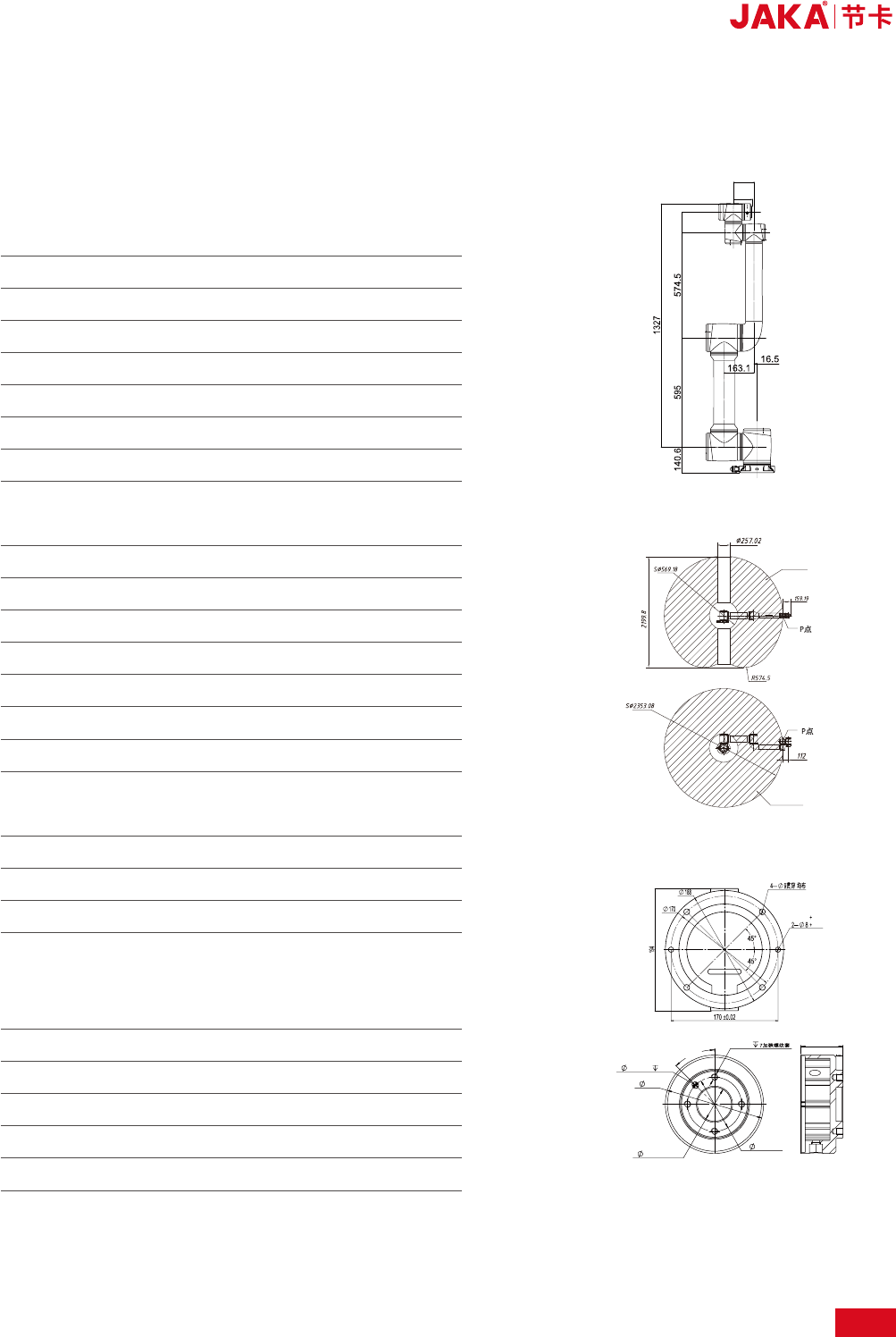
12 0.025 0.010 4xM6 6 + 0.012 0 10 31.5 + 0.025 0 91 45° 50P.C.D 6.5 39 2 1 1 112 100.5 P点可达空间 P点可达空间 JAKA Zu ® 12 外形尺寸图 JAKA Zu ® 12 P 点可达空间正视 (上 ) 俯视 (下 ) 图 JAKA Zu ® 12 底座 (上) 与末端法兰 (下) 安装尺寸图 JAKA Zu ® 12 本体参数表及尺寸图 12…
11
汽车及零部件、精密制造、电器、食品
● 更高载荷:自重41kg,负载12kg,工作半径达到1327mm;
● 灵活部署:轻松切换安装方式/位置,对部署环境的要求更低;
● 赋能更多:能替代繁重的体力搬运工作等工作,填补更多行业空白。
节卡小助
®
系列协作机器人
负载
12kg
自重
41kg
工作半径
1327mm
重复定位精度
±0.03mm
JAKA Zu
®
12
协作机器人
产品亮点
推荐市场
kg
12
0.025
0.010
4xM6
6
+
0.012
0
10
31.5
+
0.025
0
91
45°
50P.C.D
6.5
39
211
112
100.5
P点可达空间
P点可达空间
JAKA Zu
®
12 外形尺寸图
JAKA Zu
®
12 P点可达空间正视(上)俯视(下)图
JAKA Zu
®
12 底座(上)与末端法兰(下)安装尺寸图
JAKA Zu
®
12本体参数表及尺寸图
12kg
41kg
1327mm
±0.03mm
6
图形化编程、拖拽编程
移动终端(PAD/手机)APP
根据GB 11291.1-2011 进行协作操作
动作范围
±360°
-85°,+265°
±175°
-85°,+265°
±360°
±360°
/
500W
0-50°C
IP54
任意角度安装
数字输入 2
数字输出 2
模拟输入 1
24V
M8
铝合金、PC
188mm
6m
有效负载
重量(含电缆)
工作半径
重复定位精度
自由度数
编程
示教器类型
协作操作
机械臂
关节1
关节2
关节3
关节4
关节5
关节6
工具端最大速度
额定功率
温度范围
IP等级
机器人安装
工具I/O端口
工具I/O电源
工具I/O接口尺寸
材质
底座直径
机器人连接电缆长度
最大速度
120°/s
120°/s
120°/s
180°/s
180°/s
180°/s
3m/s
13
汽车制造、金属加工、注塑加工、医疗化工
● 大负载:自重35kg,负载18kg,工作半径达到1073mm;
● 安全性强:多重安全防护,能与人、机器人、周围环境安全协作;
● 应用广:覆盖了大负载协作机器人的各种应用场景。
节卡小助
®
系列协作机器人
负载
18kg
自重
35kg
工作半径
1073mm
重复定位精度
±0.03mm
JAKA Zu
®
18
协作机器人
产品亮点
推荐市场
kg