节卡协作机器人目录.pdf - 第15页
传统工业机器人生产线工作多为重复、 枯燥、 机械式操作 , 同时充斥着多种潜在危险。 在人力成本不断 提升的今天 , 企业收回投资成本显得极其昂贵。 节卡系列协作机器人拥有先进机器人自动化技术的全部优点 , 避免了传统机器人所必需的安全防护 区域设置等额外成本 , 并通过工作分配将人从枯燥、 重复、 危险、 肮脏的工作环境中解放出来 。 良好的 作业效率 , 让企业在短时间内即可收回投资成本 , 成就现代化智慧工厂。 15
14
JAKA Zu
®
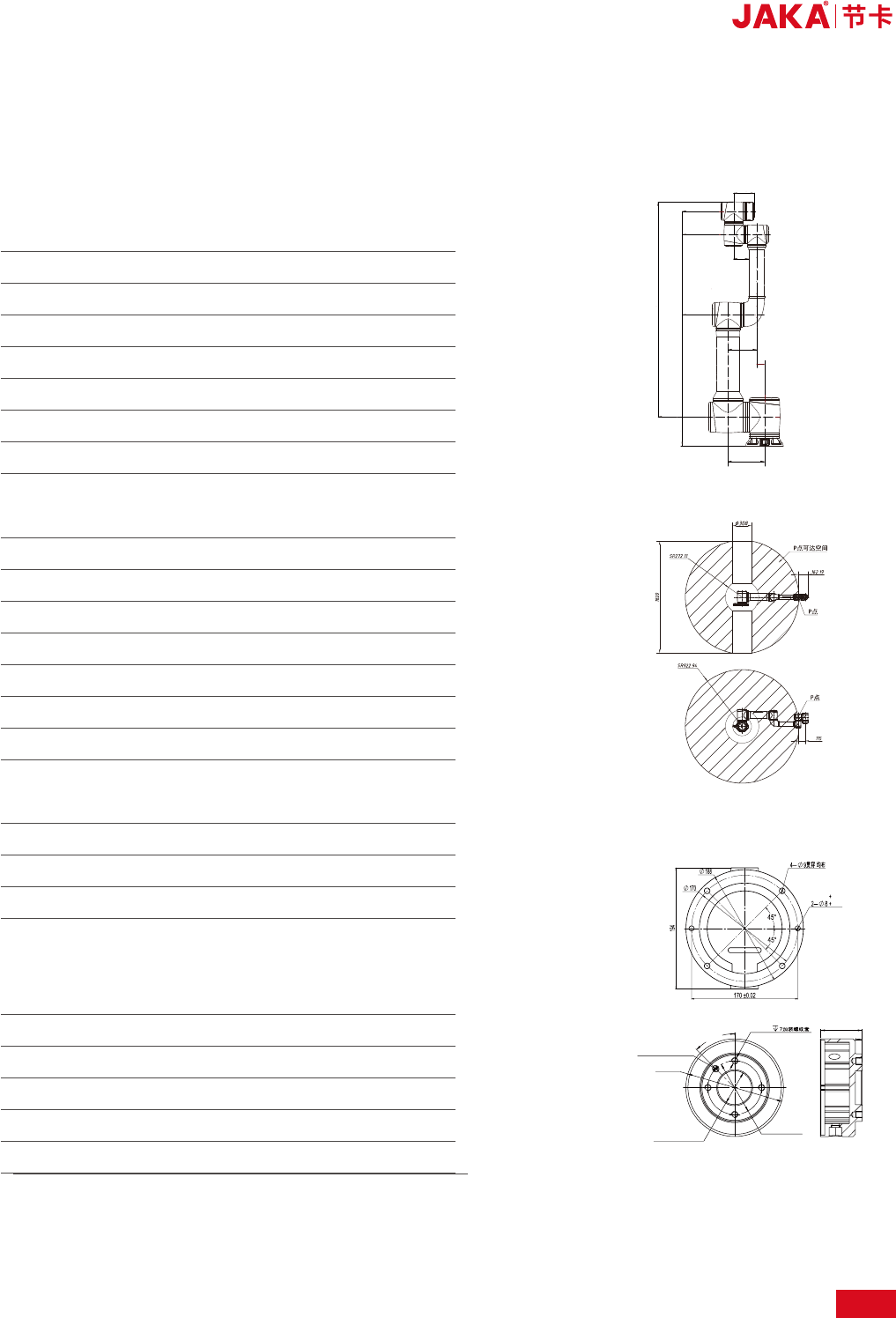
18 外形尺寸图
JAKA Zu
®
18 P点可达空间正视(上)俯视(下)图
JAKA Zu
®
18 底座(上)与末端法兰(下)安装尺寸图
0.025
0.010
4xM6
6
+
0.012
0
10
31.5
+
0.025
0
91
45°
50P.C.D
6.5
39
103.5
115
142.65
181.65
142.65
39
115400510
1072.18
JAKA Zu
®
18本体参数表及尺寸图
18kg
35kg
1073mm
±0.03mm
6
图形化编程、拖拽编程
移动终端(PAD/手机)APP
根据GB 11291.1-2011 进行协作操作
动作范围
±360°
-85°,+265°
±175°
-85°,+265°
±360°
±360°
/
600W
0-50°C
IP54
任意角度安装
数字输入 2
数字输出 2
模拟输入 1
24V
M8
铝合金、PC
188mm
6m
有效负载
重量(含电缆)
工作半径
重复定位精度
自由度数
编程
示教器类型
协作操作
机械臂
关节1
关节2
关节3
关节4
关节5
关节6
工具端最大速度
额定功率
温度范围
IP等级
机器人安装
工具I/O端口
工具I/O电源
工具I/O接口尺寸
材质
底座直径
机器人连接电缆长度
最大速度
120°/s
120°/s
120°/s
180°/s
180°/s
180°/s
3.5m/s

传统工业机器人生产线工作多为重复、枯燥、机械式操作,同时充斥着多种潜在危险。在人力成本不断
提升的今天,企业收回投资成本显得极其昂贵。
节卡系列协作机器人拥有先进机器人自动化技术的全部优点,避免了传统机器人所必需的安全防护
区域设置等额外成本,并通过工作分配将人从枯燥、重复、危险、肮脏的工作环境中解放出来。良好的
作业效率,让企业在短时间内即可收回投资成本,成就现代化智慧工厂。
15
16
关节1
关节2
关节3
关节4
关节5
关节6
大臂
小臂
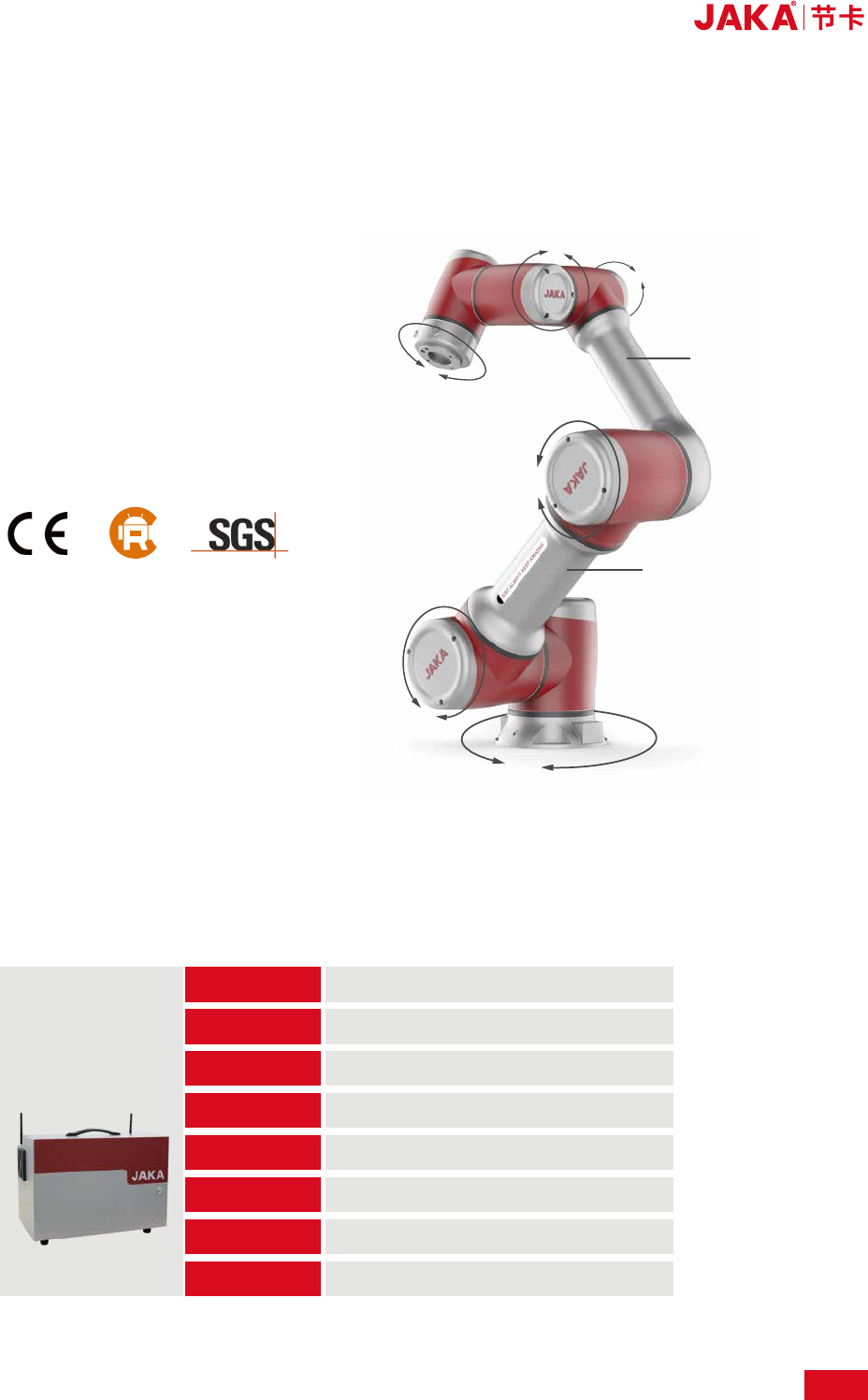
JAKA Zu® 系列结构示意图
JAKA Zu® 系列电控柜参数
IP等级
电控柜I/O端口
电控柜I/O电源
通信方式
电源
电控柜尺寸
重量
材质
IP44
16个数字输入/16个数字输出/2个模拟输入或输出
24V
TCP/IP, Modbus TCP, Modbus RTU
100-240VAC, 50-60Hz
410×307×235 (mm) (W×H×D)
12kg (Zu 3,Zu 5, Zu 7) / 16kg (Zu 12, Zu 18)
不锈钢合金
电控柜