节卡协作机器人目录.pdf - 第5页
05 3C电子、 精密制造、 教育、 新商业 ● 更轻自重: 自重 12kg ,负 载 3kg , 工作半径达到 626mm ; ● 更灵活轻便: 轻量化设计 , 让效率更高 , 客户部署更快、 更便捷; ● 更高精度: 能够适应狭小的空间安装、 高精度密度要求的柔性化生产线 。 节卡小助 ® 系列协作机器人 负载 3kg 自重 12kg 工作半径 626mm 重复定位精度 ±0.02mm JAKA Zu ® 3 协作机器人 产品亮点 …
04
远程交互,实时监控
安全协作,碰撞保护
即插即用,快速切换
开放软硬件生态系统
拖拽&图形化编程
无线互联,免示教器
支持远程编程控制协作,不再局限于地理界线的
同时,节卡系列协作机器人还实现了1台移动终端
对多台机器人本体的控制。现在,只需通过移动终
端即可实现程序命令或任务包的远程下达。
节卡系列协作机器人开创性地采用了移
动终端APP控制模式,摆脱了传统笨重
的示教器与冗长的控制线,让有限空间
内的示教过程变得更加得心应手。
节卡系列协作机器人轻盈小巧,具有安装
简便、视觉识别、设备兼容性强等特点,良
好的通用性与柔性特征使得节卡机器人
在任何生产环境中都能真正实现即插即
用、快速部署,对于小批量、多批次、定制
化、短周期等生产需求应用极佳。
内置力矩反馈模块,当碰撞力矩达到设定的力矩上限
时,机器人会及时停止,避免导致人员受伤或设备损
坏,实现人机安全协作。
手动拖拽机器人末端到相应点位,机器人自主学习记忆完
成编程,即使零基础的应用者也可轻松示教,人机协作更人
性化。新程序即编即调,全部过程仅需数分钟,实现任务快
速转换。
基于Linux系统平台开发,兼容性高。用户可从Android、iOS、
Windows等多平台系统,通过以太网协议(TCP/IP)以及
Modbus与机器人远程交互。提供通用的控制接口,快速对接
上下游自动化设备。
05
3C电子、精密制造、教育、新商业
● 更轻自重:自重12kg,负 载 3kg,工作半径达到626mm;
● 更灵活轻便:轻量化设计,让效率更高,客户部署更快、更便捷;
●更高精度:能够适应狭小的空间安装、高精度密度要求的柔性化生产线。
节卡小助
®
系列协作机器人
负载
3kg
自重
12kg
工作半径
626mm
重复定位精度
±0.02mm
JAKA Zu
®
3
协作机器人
产品亮点
推荐市场
kg
06
JAKA Zu
®
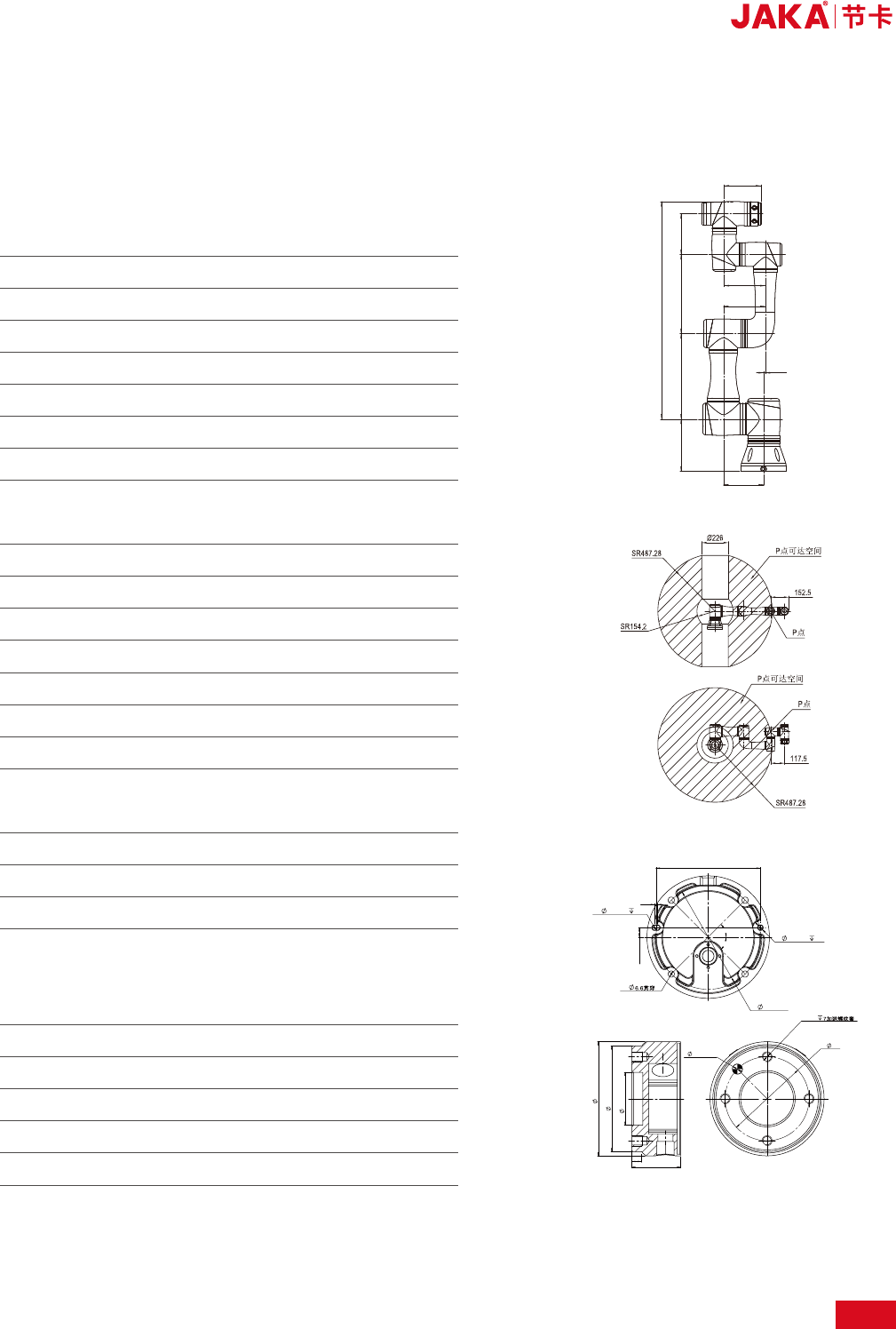
3 外形尺寸图
JAKA Zu
®
3 P点可达空间正视(上)俯视(下)图
JAKA Zu
®
3 底座(上)与末端法兰(下)安装尺寸图
6
+
0.012
0
4-M6
50
31.5
+
0.025
0
63
-
0
0.030
29
5.5
68
5
+
0.012
0
3
2-
5
+
0.012
0
10
4-
110 ±0.5
45°
45°
110 ±0.5
10 ±0.05
626.5
150.55
117.5
105
119.5
228
115
246 117.5
4.5
JAKA Zu
®
3本体参数表及尺寸图
3kg
12kg
626mm
±0.02mm
6
图形化编程、拖拽编程
移动终端(PAD/手机)APP
根据GB 11291.1-2011 进行协作操作
动作范围
±360°
-85°,+265°
±175°
-85°,+265°
±360°
±360°
/
150W
0-50°C
IP54
任意角度安装
数字输入 2
数字输出 2
模拟输入 1
24V
M8
铝合金、PC
129mm
6m
有效负载
重量(含电缆)
工作半径
重复定位精度
自由度数
编程
示教器类型
协作操作
机械臂
关节1
关节2
关节3
关节4
关节5
关节6
工具端最大速度
额定功率
温度范围
IP等级
机器人安装
工具I/O端口
工具I/O电源
工具I/O接口尺寸
材质
底座直径
机器人连接电缆长度
最大速度
180°/s
180°/s
180°/s
220°/s
220°/s
220°/s
1.5m/s