节卡协作机器人目录.pdf - 第18页
18 基本参数 硬件平台 通信接口 碰撞检测最高精度 恒力跟踪最高精度 力觉传感器 TCP /UDP /串口 10N 1N JAKA Zu ® 系列协作机器人力控s版产品配置工业级的力觉 传感器 , 并集成自主知识产权的力控算法 , 提高协作机器 人本体的感知能力 , 为客户提供更好的人机交互体验和安 全保障。 提供恒力、 法向跟踪和速度模式等多种力控解决 方案 , 实现机器人的全臂碰撞检测。 产品描述 产品功能 力控功能示意图 力控模…
17
使用方式
JAKA Zu
®
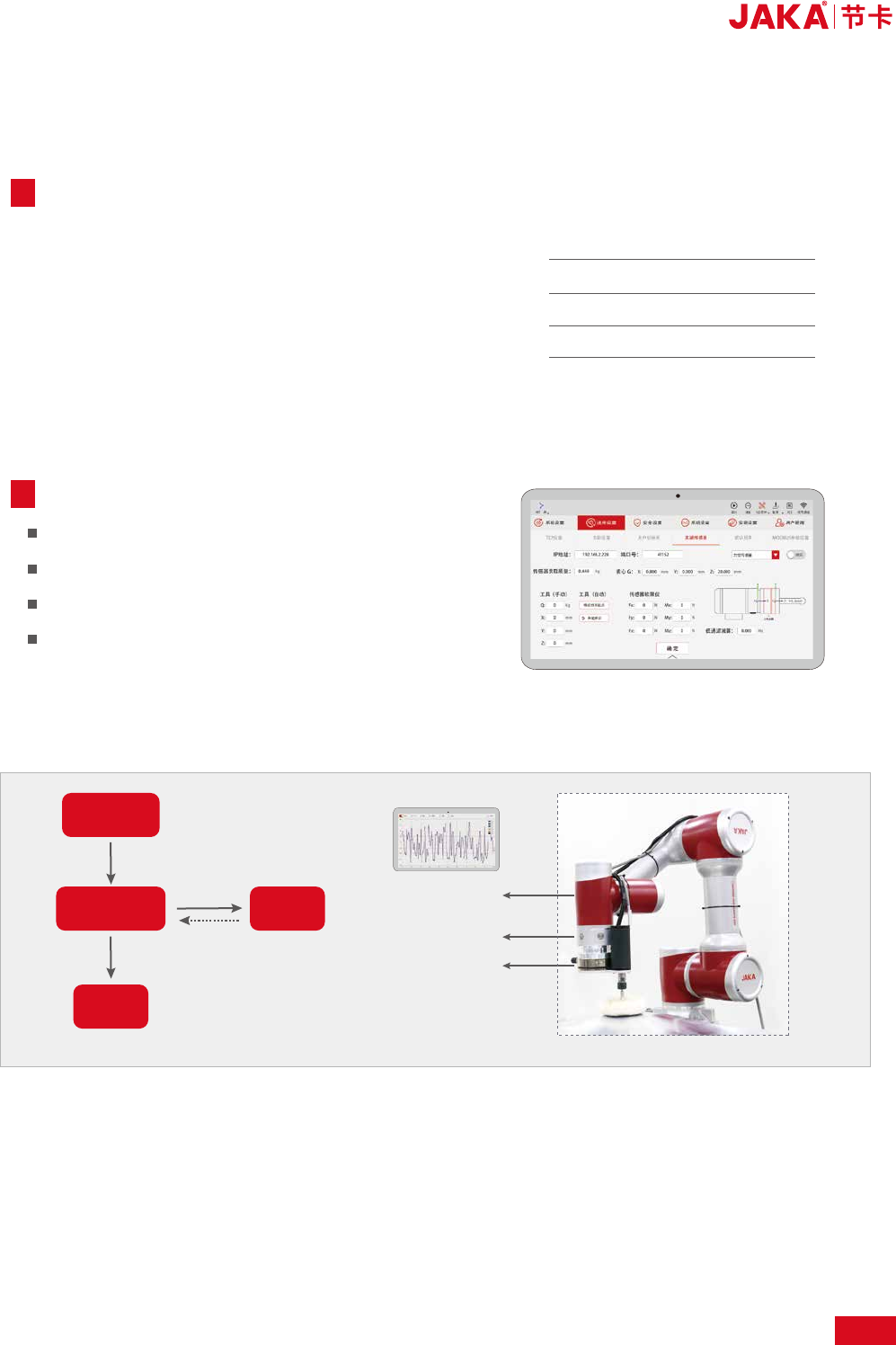
系列协作机器人力控s版APP配有力控模块,可以设置安全接触力值,自动辨识负载;实
时显示接触力值,根据应用需求设置控制参数,在程序中选择恒力或速度模式。
力觉传感器置于末端
力觉传感器置于底座
安装方式
安装于末端或底座
节卡小助®系列协作机器人力控s版
JAKA Zu
®
3s JAKA Zu
®
5s JAKA Zu
®
7s JAKA Zu
®
12s JAKA Zu
®
18s
18
基本参数
硬件平台
通信接口
碰撞检测最高精度
恒力跟踪最高精度
力觉传感器
TCP/UDP/串口
10N
1N
JAKA Zu
®
系列协作机器人力控s版产品配置工业级的力觉
传感器,并集成自主知识产权的力控算法,提高协作机器
人本体的感知能力,为客户提供更好的人机交互体验和安
全保障。提供恒力、法向跟踪和速度模式等多种力控解决
方案,实现机器人的全臂碰撞检测。
产品描述
产品功能
力控功能示意图
力控模块
力觉传感器
机器人
APP
配置参数
力信息
力信息
力控指令
APP实时显示接触力
多种拖拽模式
配置力觉传感器
软件界面实时显示机器人与外界接触力
软件界面设置安全接触力和力控参数
可实现机器人末端恒力控制和法向跟踪
可实现机器人全臂碰撞检测
19
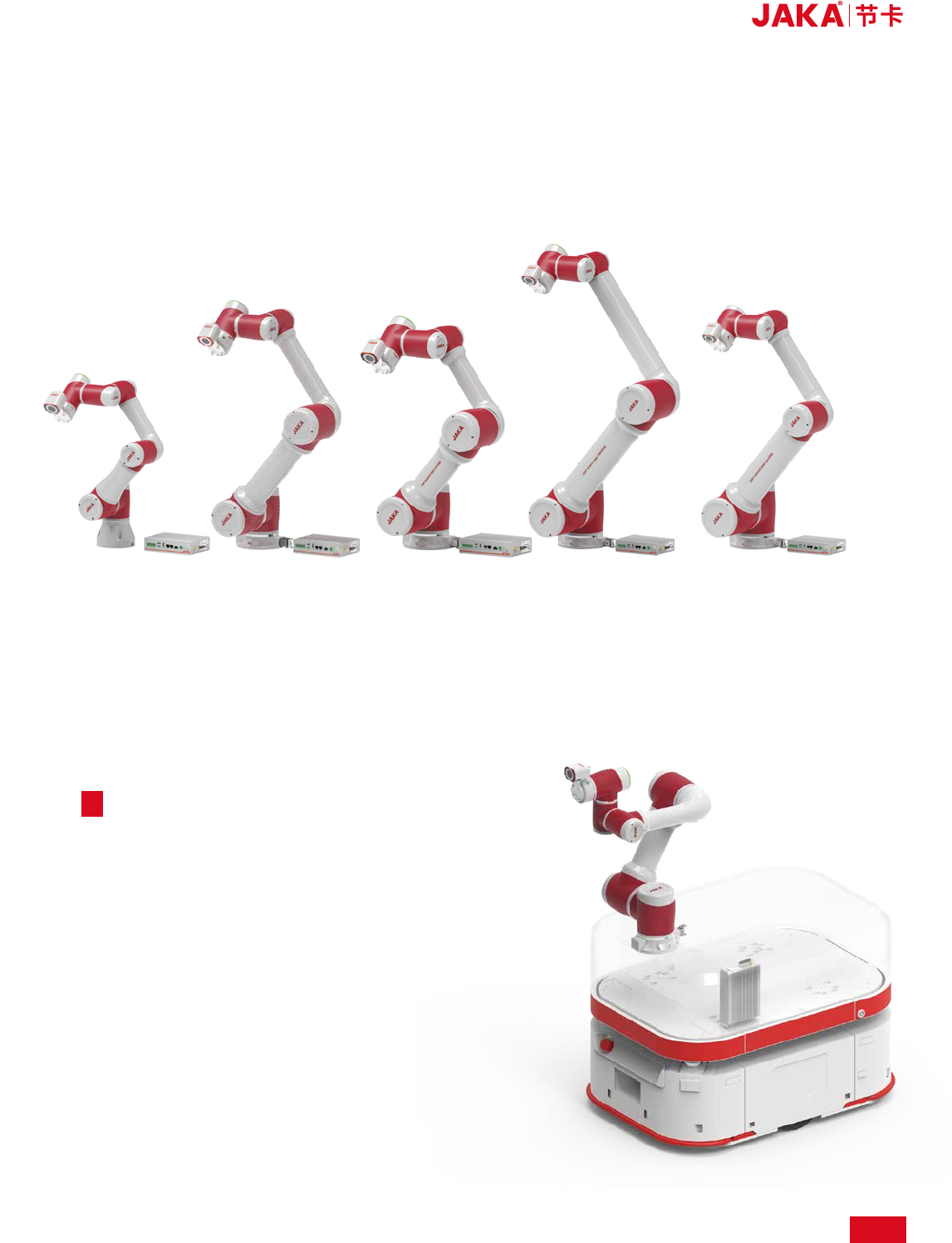
JAKA All-in-one共融系列协作机器人采用S
3
(Smart,
Simple,Small)
的产品设计原则,极致创新,融合了无线示
教、图形化编程、视觉安全防护等机器人技术,革新了人与
机器人的交互方式,提升了人机协作交互的安全性,大大降
低了机器人的使用门槛。同时,节卡新一代共融协作机器人
已深度融合视觉,保障机械臂、人、作业环境三者之间自然
交互、自主适应,显著拓宽了机器人的应用边界。
产品描述
JAKA All-in-one共融系列协作机器人
JAKA Ai 3 JAKA Ai 7 JAKA Ai 12 JAKA Ai 18
JAKA Ai 5