节卡协作机器人目录.pdf - 第8页
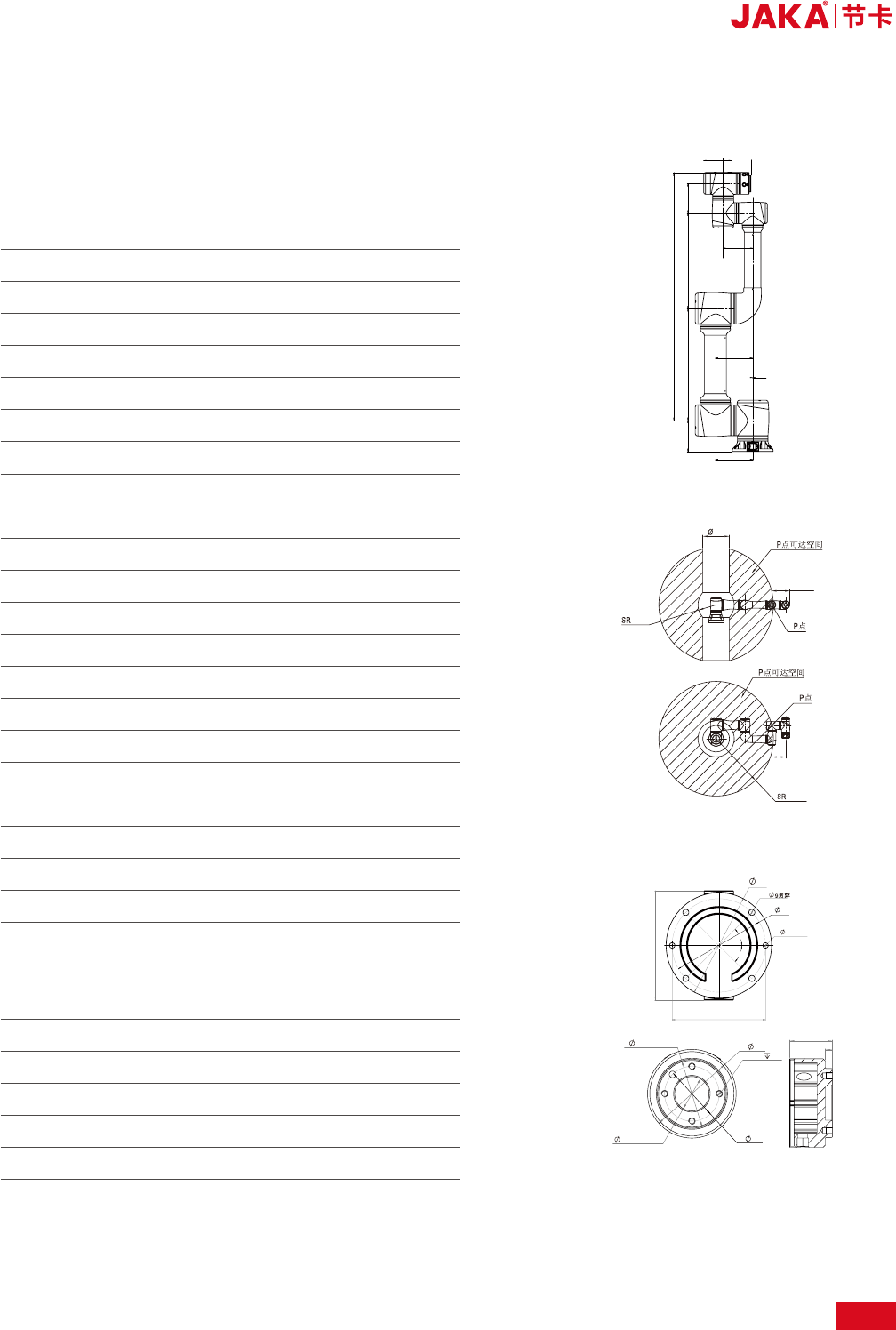
08 JAKA Zu ® 5 外形尺寸图 JAKA Zu ® 5 P 点可达空间正视 (上 ) 俯视 (下 ) 图 JAKA Zu ® 5 底座 (上 ) 与末端法兰 ( 下) 安装尺寸图 228 155.69 806.68 113.5 243.38 JAKA Zu ® 5 本体参数表及尺寸图 5kg 23kg 954mm ±0.02mm 6 图形化编程、 拖拽编程 移动终端 (P AD/手机 ) APP 根据GB 11291.1-20…
07
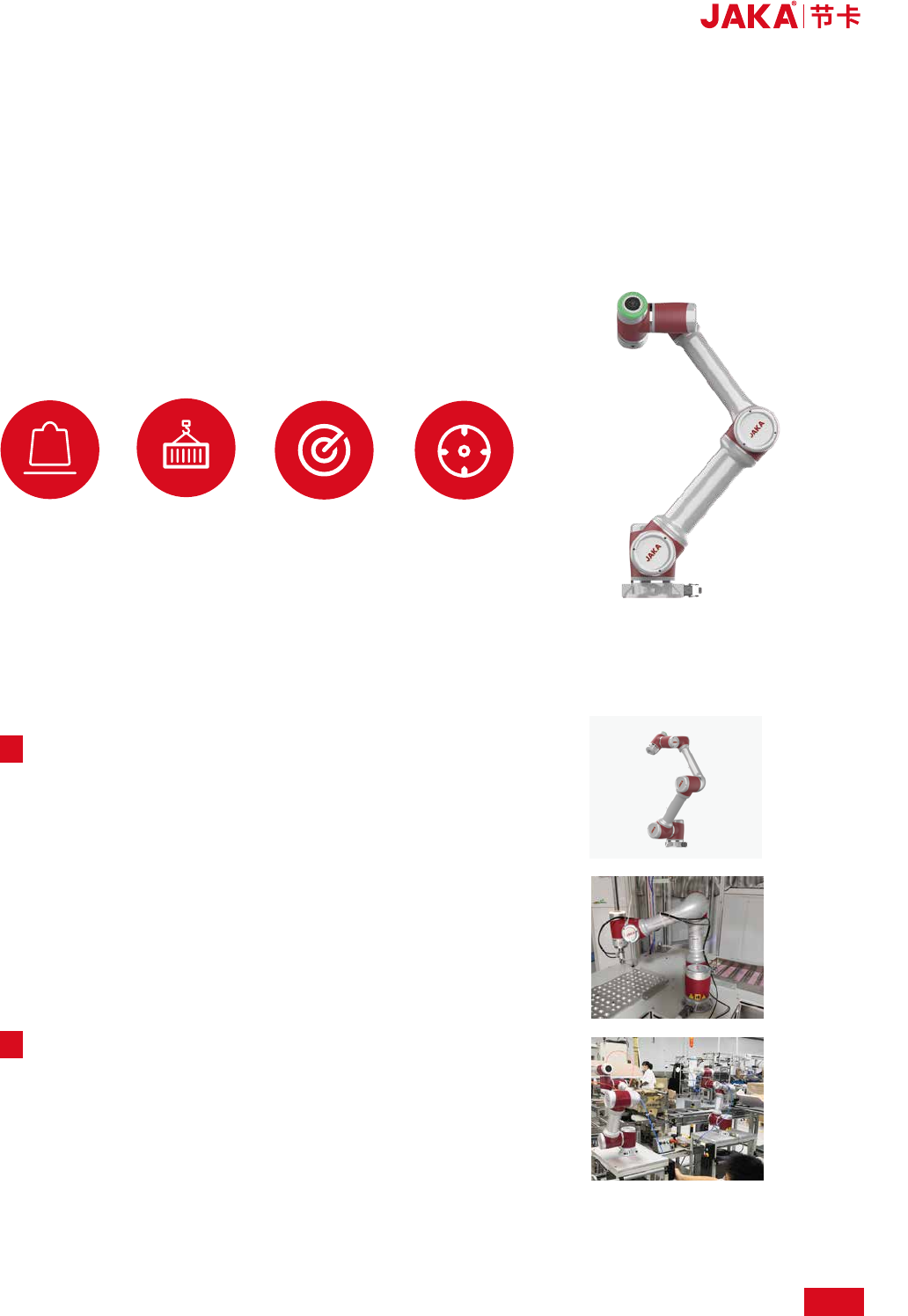
汽车及零部件、3C电子、精密制造、新能源
● 小巧轻便:自重23kg,负载5kg,工作半径达到954mm;
● 灵活性高:快速部署,能够节省员工工作时间,优化整体生产率;
● 适应性强:满足轻量化的作业需求,如上下料、测试、装配等。
节卡小助
®
系列协作机器人
负载
5kg
自重
23kg
工作半径
954mm
重复定位精度
±0.02mm
JAKA Zu
®
5
协作机器人
产品亮点
推荐市场
kg
08
JAKA Zu
®
5 外形尺寸图
JAKA Zu
®
5 P点可达空间正视(上)俯视(下)图
JAKA Zu
®
5 底座(上)与末端法兰(下)安装尺寸图
228
155.69
806.68
113.5
243.38
JAKA Zu
®
5本体参数表及尺寸图
5kg
23kg
954mm
±0.02mm
6
图形化编程、拖拽编程
移动终端(PAD/手机)APP
根据GB 11291.1-2011 进行协作操作
动作范围
±360°
-85°,+265°
±175°
-85°,+265°
±360°
±360°
/
350W
0-50°C
IP54
任意角度安装
数字输入 2
数字输出 2
模拟输入 1
24V
M8
铝合金、PC
158mm
6m
有效负载
重量(含电缆)
工作半径
重复定位精度
自由度数
编程
示教器类型
协作操作
机械臂
关节1
关节2
关节3
关节4
关节5
关节6
工具端最大速度
额定功率
温度范围
IP等级
机器人安装
工具I/O端口
工具I/O电源
工具I/O接口尺寸
材质
底座直径
机器人连接电缆长度
最大速度
180°/s
180°/s
180°/s
180°/s
180°/s
180°/s
3m/s
164
140 ±0.02
4X
2-
8
H7
+
0.02
0
158
140
45°
45°
81
4-M6
10
31.5
H7
+
0.025
0
63 h7
-
0.030
50
39
6.5
120.15
144.15
143.65
0.5
430 368.5 113.5
952.5
107
113.5
09
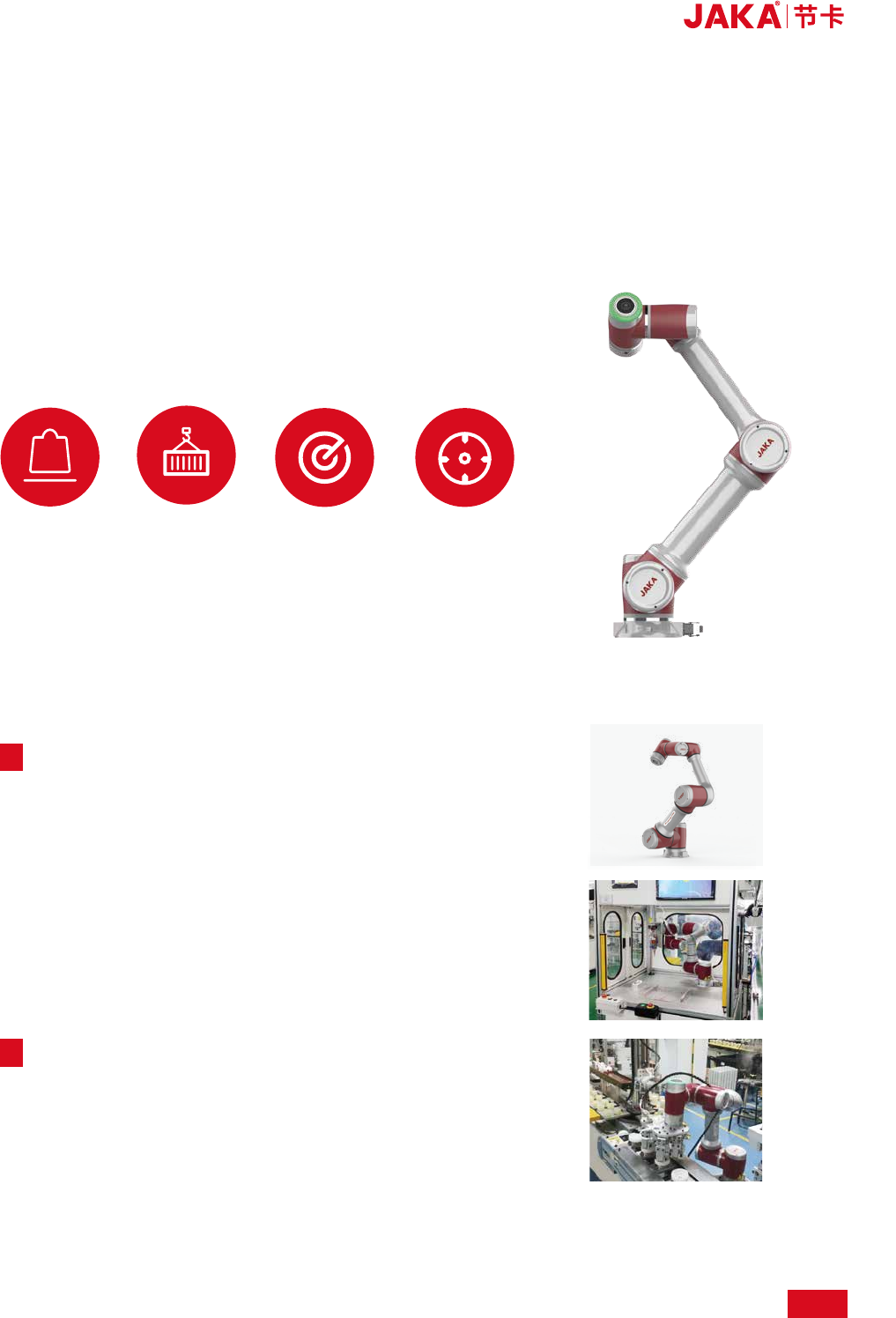
汽车及零部件、医疗器械、电器、新能源
● 高载荷:自重22kg,负载7kg,工作半径达到819mm;
● 高性价比:良好的通用性与柔性特征使其在任何生产环境中真正实现
即插即用、5分钟产线布局的极速体验;
● 高适用性:多领域应用,应用于汽车及相关、3C电子、精密制造、可再生
能源、医疗器械、化纤等领域上下料、检测、搬运等应用场景。
节卡小助
®
系列协作机器人
负载
7kg
自重
22kg
工作半径
819mm
重复定位精度
±0.02mm
JAKA Zu
®
7
协作机器人
产品亮点
推荐市场
kg