KE-2070_80_80R_Operation_Manual2_Rev10_C.pdf - 第104页
操作手册Ⅱ 2-58 灵活 2 根据测量结果,检出元件的左右对称轴,从该轴取 得元件的中心坐标、 及角度偏差量, 进行贴片校正。 元件尺寸,根据上述计算测量出的角度偏差量,以 实际的元件角度 0 °为基础,把测量结果中最大的 幅度判断为 X 、 Y 。 如果元件存在多个对称轴, 因能取得元件的准确的中心 坐标,此形状会非常有效 (例:左图「○」元件)。 对称轴为1 个时,由于无法 取得元件的Y 方向的准确的 中心坐标,有时会发生贴片 偏…
操作手册Ⅱ
2-57
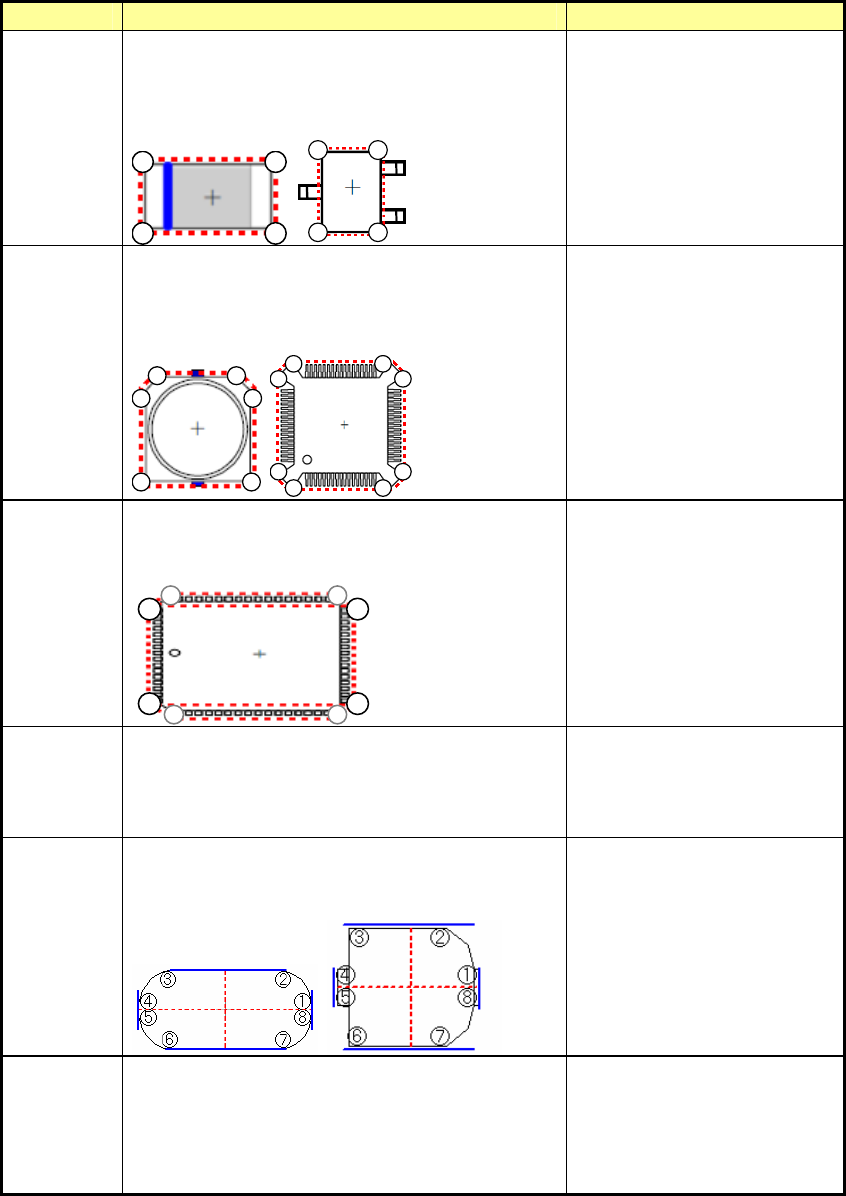
5) 元件形状
可以指定供激光识别用的元件形状。主要用途如下:
元件形状 动作 用途
无缺角 从测量数据检测出 4 个顶点,进行位置偏差、
角度偏差的计算、校正,并进行贴片。
对于无缺角,近似四边形形状的元件,可设置
此种元件形状。
2
3 4
1
2
1
3
4
芯片、圆筒形芯片、SOT、QFN、
微调电器、单向连接器、双
向连接器、Z 引脚连接器、其
他元件
有缺角 从测量数据检测出 5~8 个顶点,进行位置偏
差、角度偏差的计算、校正,并进行贴片。
对于只有 1 个缺角的元件,以及 QFP 等在激光
测量位置有引脚的元件,可设置此种元件形状。
1
2 3
4
6 5
1
2
3
4
5
6 7
8
铝电解电容、GaAsFET、SOP、
HSOP、SOJ、QFP、FQFP(BQFP)、
TSOP、TSOP2、BGA、网络电
阻、J 引脚插座、单向连接器、
鸥翼式插座、带减震器的插
座
PLCC 从测量数据检测出 8 个顶点,使用其中 4 个点
进行位置偏差、角度偏差的计算、校正,并进
行贴片。是 PLCC 专用的元件形状。
2
1
3
4
8
7
6
5
PLCC
圆筒 从测量数据进行位置偏差、角度偏差的计算、
校正,并进行贴片。
用于没有角的圆筒元件等。
在此种情况下,忽略角度(忽
略极性),仅求得元件的中
心。
灵活 从测量数据中抽出在 X、Y 方向上能构成元件幅
度最小的附近 8 个点,计算·校正位置偏差、
角度偏差后,进行贴片。
用于“无缺角”、“有缺角”、
“PLCC”等构成激光识别错
误 93(形状识别错误)的多
角形元件等。
与其他元件形状比使用数据
量少,因此精度稍差,但可
以测量更多种类的元件。
不设置 根据吸取姿势按贴片角度转动并贴片。 用于激光定中心不稳定的元
件(超出规格的极薄的元
件)。此时不进行定中心而直
接进行贴片。因此贴片位置
受吸取位置影响。
操作手册Ⅱ
2-58
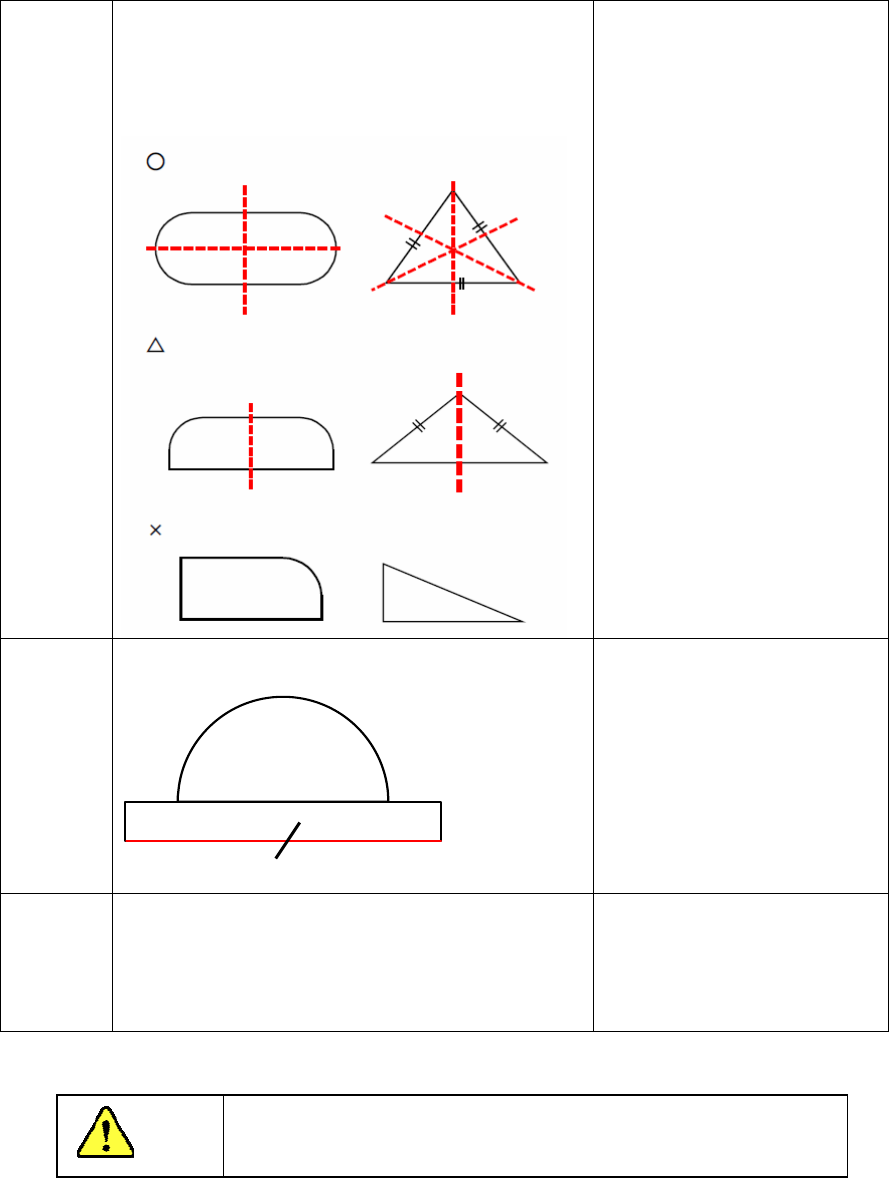
灵活 2 根据测量结果,检出元件的左右对称轴,从该轴取
得元件的中心坐标、及角度偏差量,进行贴片校正。
元件尺寸,根据上述计算测量出的角度偏差量,以
实际的元件角度
0°为基础,把测量结果中最大的
幅度判断为
X、Y 。
如果元件存在多个对称轴,
因能取得元件的准确的中心
坐标,此形状会非常有效
(例:左图「○」元件)。
对称轴为1 个时,由于无法
取得元件的Y 方向的准确的
中心坐标,有时会发生贴片
偏移(例:左图「△」元件)。
但是,由于此偏移量有再现
性,输入贴片偏移量的方法,
有时也可以使用。
如果元件没有对称性,此形
状无效(例:左图「×」元件)。
灵活 3 用元件的最小幅度附近的数据计算XY 的幅度、位
移量。从元件的 X 方向的 1 边的倾斜取得角度。
异形元件
可识别许多异形元件,但如
果元件的上下带有圆形,角
度偏移值会变得不稳定。
不设置 根据吸取姿势按贴片角度转动并贴片。 用于激光定中心不稳定的元件
(超出规格的极薄的元件)。此
时不进行定中心而直接进行贴
片。因此贴片位置受吸取位置
影响。
注意
元件形状的初始值根据元件种类而定。一般情况下,如果改变算法
会导致错误发生率增大。因此除特殊情况外,请绝对不要变更。
操作手册Ⅱ
2-59
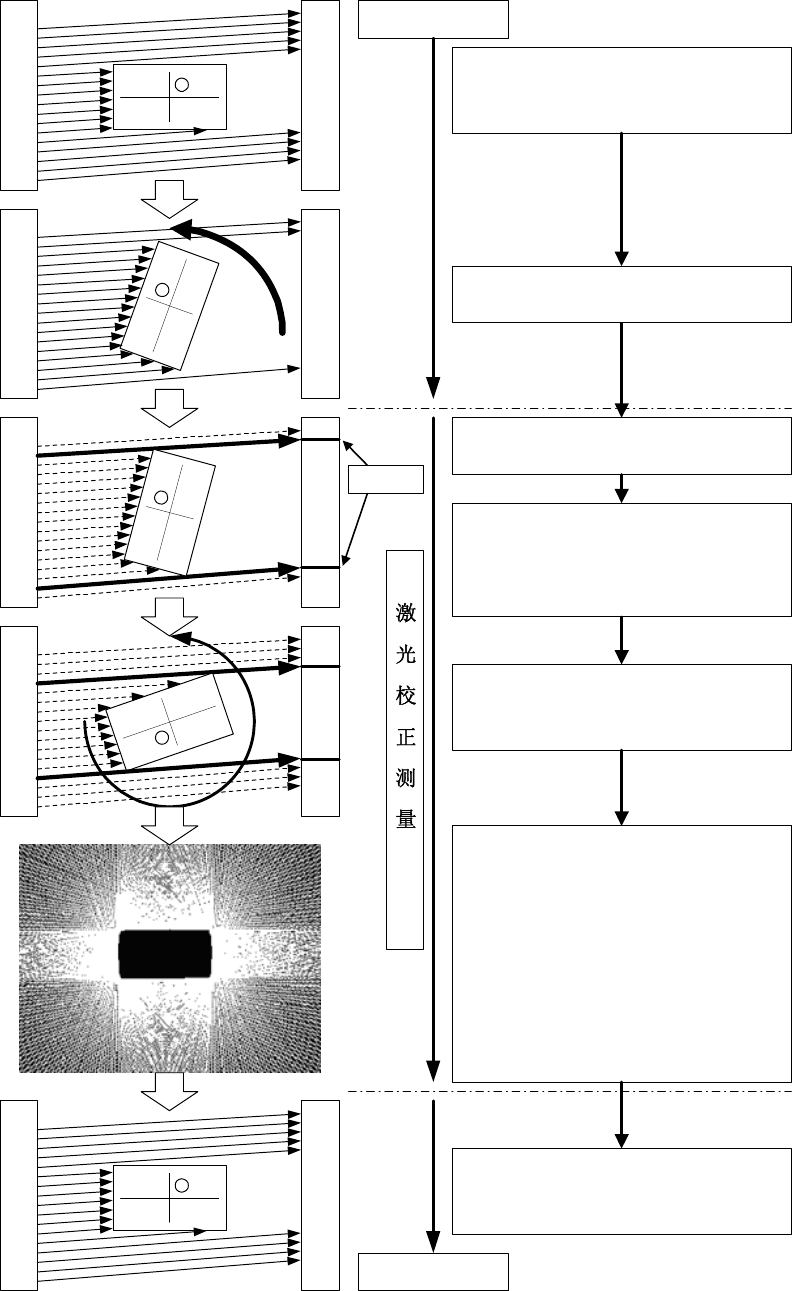
<激光校正定心流程>
※ LNC60 时
吸取元件
驱动 Z 轴,吸取元件,
把元件对准激光校正高度。
开始旋转
θ
轴。
θ
轴加速时,测量尚未开始。
θ
轴旋转到一定速度后,
开始进行激光校准测量。
传感取得元件遮影边界(端部)的
位置数据。与边缘位置对应的光束
做为元件的“切线”,存入传感器。
θ
轴旋转 360°,取得各个角度
的切线数据。
旋转 360°后,传感器根据取得的各角
度的切线数据,生成和分析元件的外
形,把测量结果返回贴片机。
·元件尺寸
(X 方向:wX Y 方向: wY)
·吸嘴旋转中心与元件中心间的偏移量
(X 方向:dX Y 方向: dY)
·角度(
θ
)的偏移量:dRz
位置偏移(dX,dY)
角度偏移(dRz)
校正后,进行贴片。
贴片
边缘