KE-2070_80_80R_Operation_Manual2_Rev10_C.pdf - 第41页
操作手册Ⅱ 1-29 5) 手动控制 文件(F ) 显示(V) 控 制(C) 帮助(H ) Head (H) >> 基板搬送(C) >> 图像(V) >> 送料装置(F) >> 其他(O) >> 设置值一览表显示( V) … 构成图(D) … Head 控制(H) … 控制 Head 设备 (D)… 激光/传感控制(L )… 个别控制传送(I)… 自动控制传送(A)… 自动调整…
操作手册Ⅱ
1-28
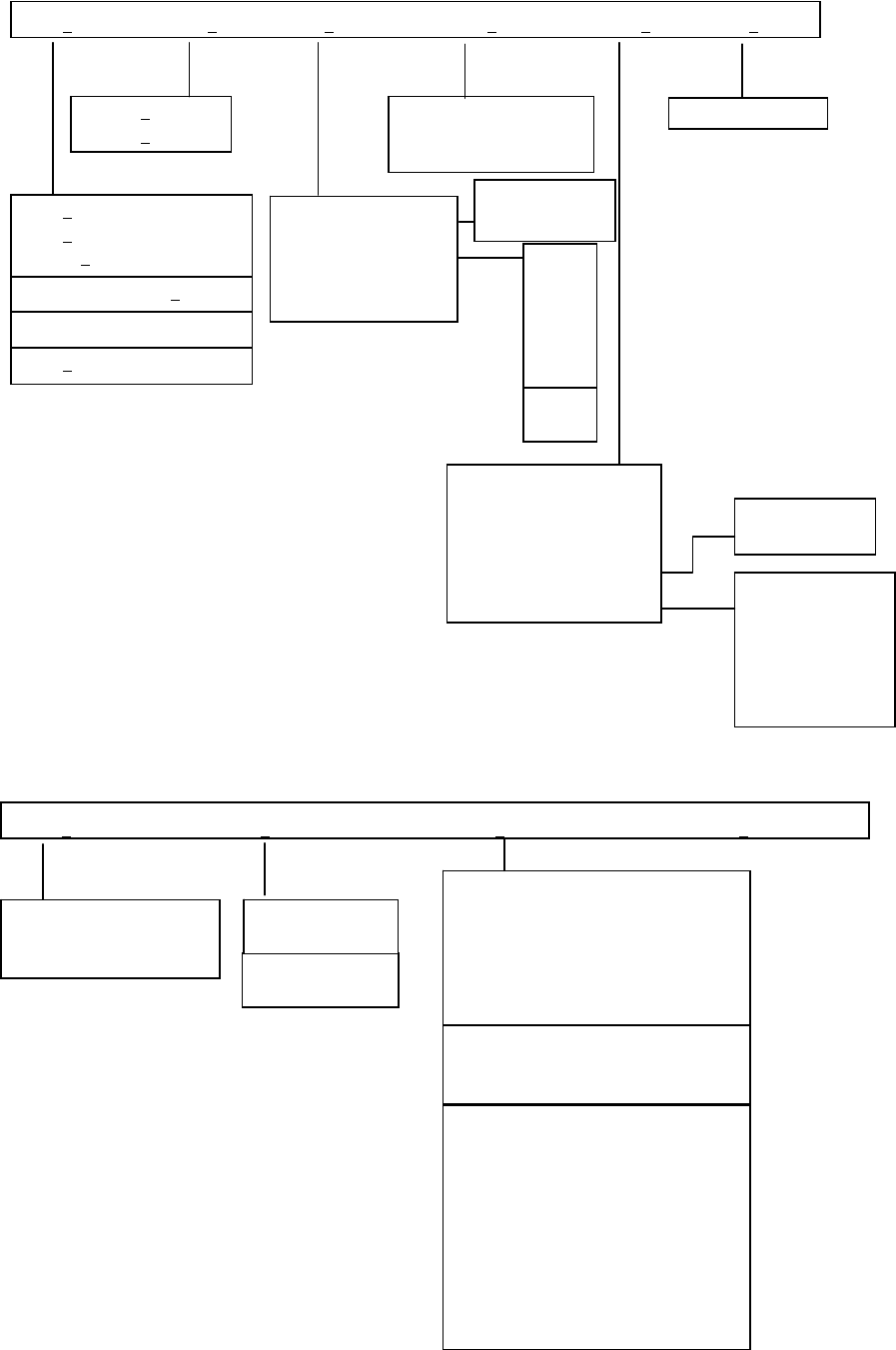
3) 生产
4) 机器设置
文件(F) 显示(V) 窗口(W) 生产支援 (C) 工具(T) 帮助(H)
KE-2000 帮助
零件数设定
操作选项
数据变更
自动基板宽调节
重试列表 >>
检查 >>
生产条件画面
生产状态… >>
生产管理信息 >>
生产情报
传送状态
检查生产程序…
跟踪贴片…
简易准备…
工具栏(T)
状态栏(S
)
打开(O) Ctrl+O
保存(S
) Ctrl+S
另存为(A
)…
删除继续生产文件(D)
退出(X)
未贴片列表
供给装置信息
合计
前侧
后侧
托盘
MTC
MTS
吸取率
清除
单独验证
连续验证
SOT 单独检查
SOT 连续检查
激光高度检查
VCS 脏污检查
设备信息的取得…
生产设备状态…
生产状态…
文件(F) 显示(V) 设置组(G) 帮助(H)
ATC 吸嘴配置(A)…
无吸嘴时真空值(V)…
基准针位置(R)…
外形基准位置(E)…
MTC 滑梭吸取位置(P)…
MTS 装配位置偏差(O)…
设置值一览表(V)
构成图显示(C)
注册吸嘴一览(L)…
读吸嘴数据(R)…
退出(X)
元件废弃位置(T)…
IC 回收带位置(I)
Head 待命位置(W)
使用单元(D)…
在线连接(L)…
基板传送(C)…
信号灯(S)…
坏板标记传感器示教(B)…
共面检测(N)…
VCS 脏污检查(J)…
校准块脏污检查(K)…
设置标记识别速度(M)…
激光面接触检查(H)…
工具栏(T)
状态栏(S)
操作手册Ⅱ
1-29
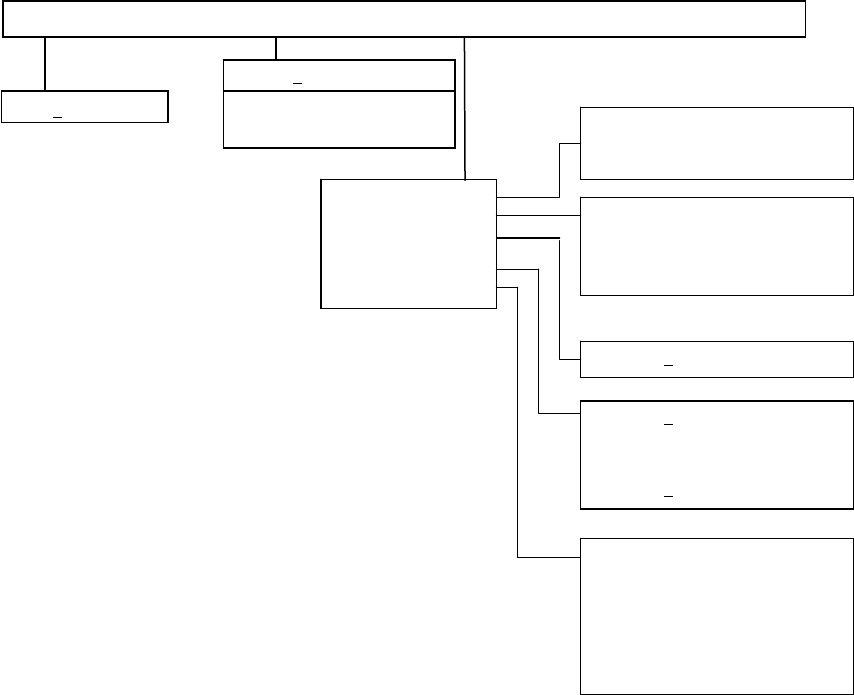
5) 手动控制
文件(F) 显示(V) 控制(C) 帮助(H)
Head (H) >>
基板搬送(C) >>
图像(V) >>
送料装置(F) >>
其他(O) >>
设置值一览表显示(V) …
构成图(D) …
Head 控制(H)…
控制 Head 设备 (D)…
激光/传感控制(L)…
个别控制传送(I)…
自动控制传送(A)…
自动调整基板宽度控制(W)…
基板条形码控制…
VCS 控制(V)…
退出(X)
状态栏(S)
ATC 控制(A)…
信号灯控制(S)…
元件验证(V)…
校准台控制(C)…
其他传感器(O)…
驱动器情况(D)…
MTC 控制(C)…
MTS 控制(S)…
送料针控制(F)…
DTS 控制(D
)…
操作手册Ⅱ
1-30
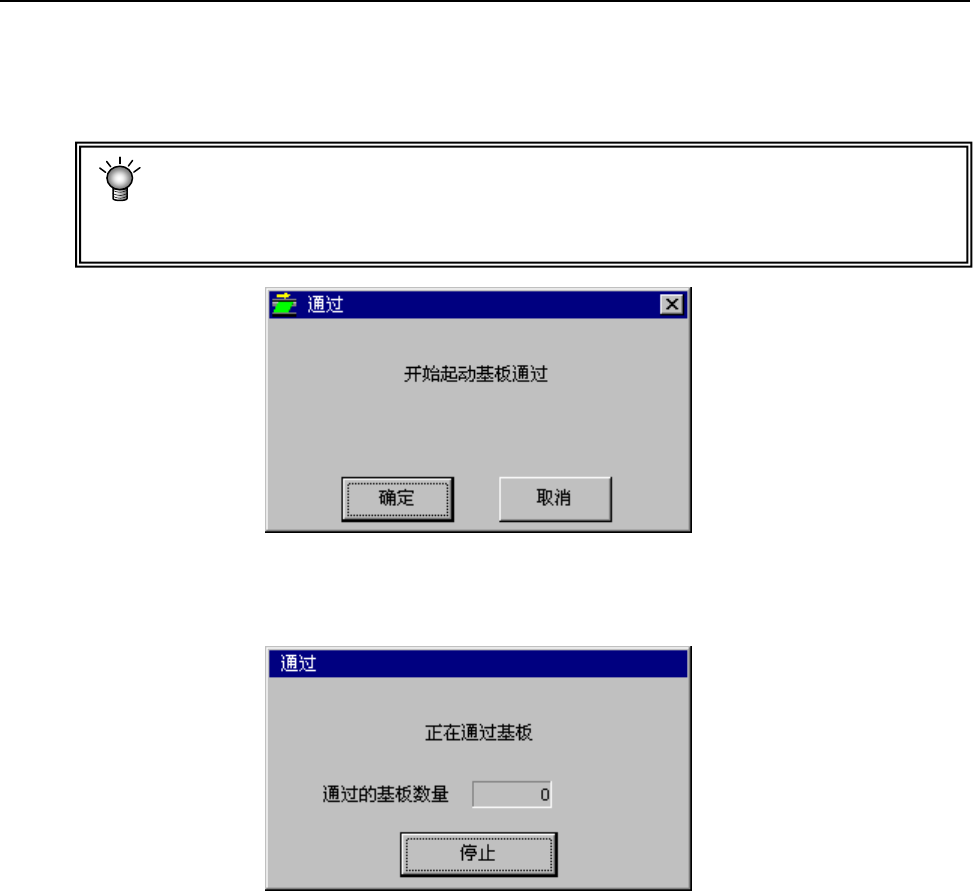
1-6 通过模式
在不进行生产、为传送缓冲基板通过时使用该模式。
从主画面的菜单栏中选择“维护”/“通过模式”后,显示以下画面。
此时,虽然无需返回原点,但需根据基板的尺寸来调整传送宽度。
即使由于设备的故障而无法返回原点,有时也能执行通过模式。
此时,为了防止因传感器的误检测而导致停止,请把贴片头组件移到离传送路线远一
些的位置上。(=大约在校准块的上方)
单击“确定”后,显示如下画面,传送传感器检测到有基板到来时,传送带开始转动。
单击“停止”后,通过模式停止。