00196512-02_UM_X-Serie_SR705_PL.pdf - 第134页
Dane techniczne automatu Instrukcja eksploatacji SIPLACE seria X G ł owica uzbrajaj ą ca Od wersji oprogramow ania SR.70x.xx Wydanie 01/2011 134 3.5.2.8 G ł owica MultiSt ar w rozszerzonym trybie Pick&Place W tym try…
Instrukcja eksploatacji SIPLACE seria X Dane techniczne automatu
Od wersji oprogramowania SR.70x.xx Wydanie 01/2011 Głowica uzbrajająca
133
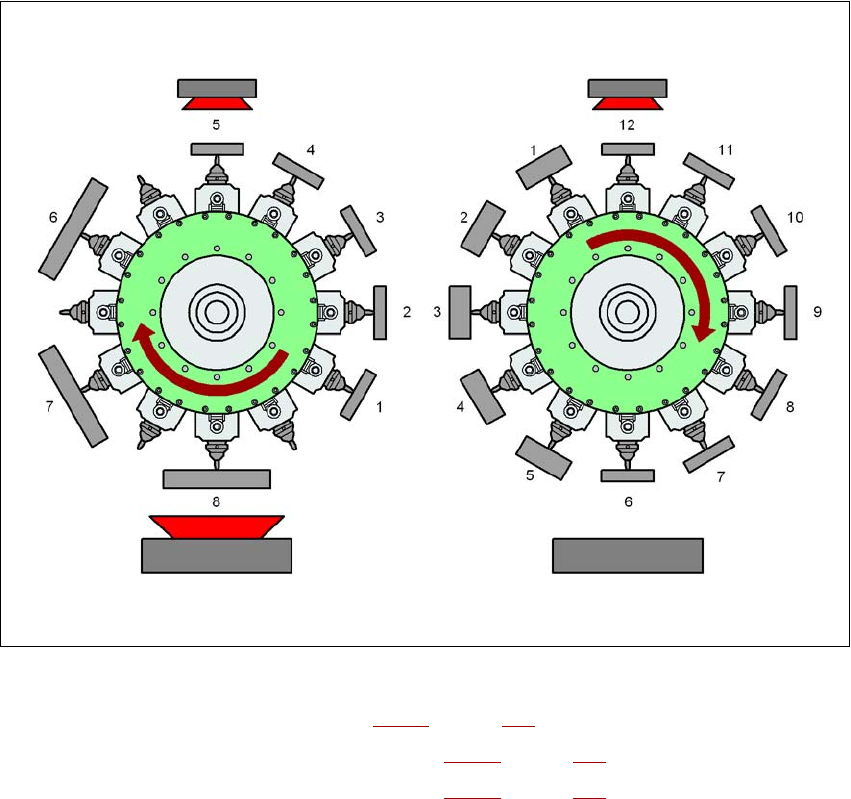
3.5.2.7 Głowica MultiStar w trybie mieszanym
W tym trybie przetwarzane są podzespoły małe do średnich.
3
Rys. 3.5 - 7 MultiStar - tryb mieszany
K_BE Mały podzespół, patrz tabela 3.5 - 1, strona 131
M_BE_1 Średni podzespół, typ 1 (patrz tabela 3.5 - 1, strona 131)
M_BE_2 Średni podzespół, typ 2 (patrz tabela 3.5 - 1
, strona 131)
Typ 30/38 Kamera do podzespołów, typ 30 lub typ 38
Typ 33 Stacjonarna kamera do podzespołów, typ 33
1 ... 8 Kolejność pobieranych podzespołów
1 ... 12 Kolejność pobieranych podzespołów
3
Sąsiadujące segmenty głowicy CPP nie mogą pobierać podzespołów typu M_BE_2, jeżeli prze-
kątna średniego podzespołu, typ 2 (M_BE_2) jest dłuższa niż 39,8 mm.
Typ 30/38 Typ 30/38
Typ 33 Typ 33
K_BE
M_BE_2
M_BE_1
K_BE
Dane techniczne automatu Instrukcja eksploatacji SIPLACE seria X
Głowica uzbrajająca Od wersji oprogramowania SR.70x.xx Wydanie 01/2011
134
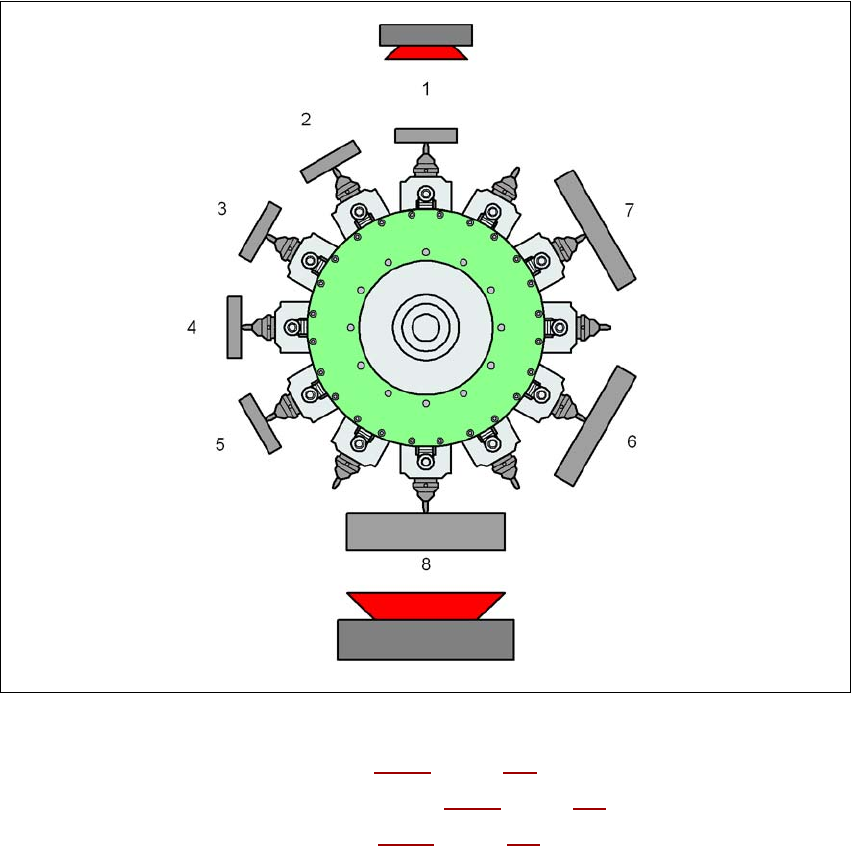
3.5.2.8 Głowica MultiStar w rozszerzonym trybie Pick&Place
W tym trybie głowica MultiStar może montować całą gamę podzespołów od 01005 do
50 x 40 mm². Duży podzespół jest najpierw odbierany, centrowany optycznie i montowany jako
pierwszy podzespół.
3
Rys. 3.5 - 8 MultiStar - tryb mieszany
K_BE Mały podzespół (patrz tabela 3.5 - 1, strona 131)
M_BE_2 Średni podzespół, typ 2 (patrz tabela 3.5 - 1
, strona 131)
G_BE Duży podzespół (patrz tabela 3.5 - 1
, strona 131)
Typ 30/38 Kamera do podzespołów, typ 30 lub typ 38
Typ 33 Stacjonarna kamera do podzespołów, typ 33
1 ... 8 Kolejność pobieranych podzespołów
3
Sąsiadujące segmenty głowicy CPP nie mogą pobierać podzespołów typu M_BE_2 i G_BE, jeżeli
przekątna tych podzespołów jest dłuższa niż 39,8 mm.
W czystym trybie Pick&Place w jednym cyklu montowany jest tylko duży podzespół. Głowica CPP
pracuje wówczas jako głowica Pick&Place.
Typ 30/38
K_BE
G_BE
Typ 33
M_BE_2
Instrukcja eksploatacji SIPLACE seria X Dane techniczne automatu
Od wersji oprogramowania SR.70x.xx Wydanie 01/2011 Głowica uzbrajająca
135
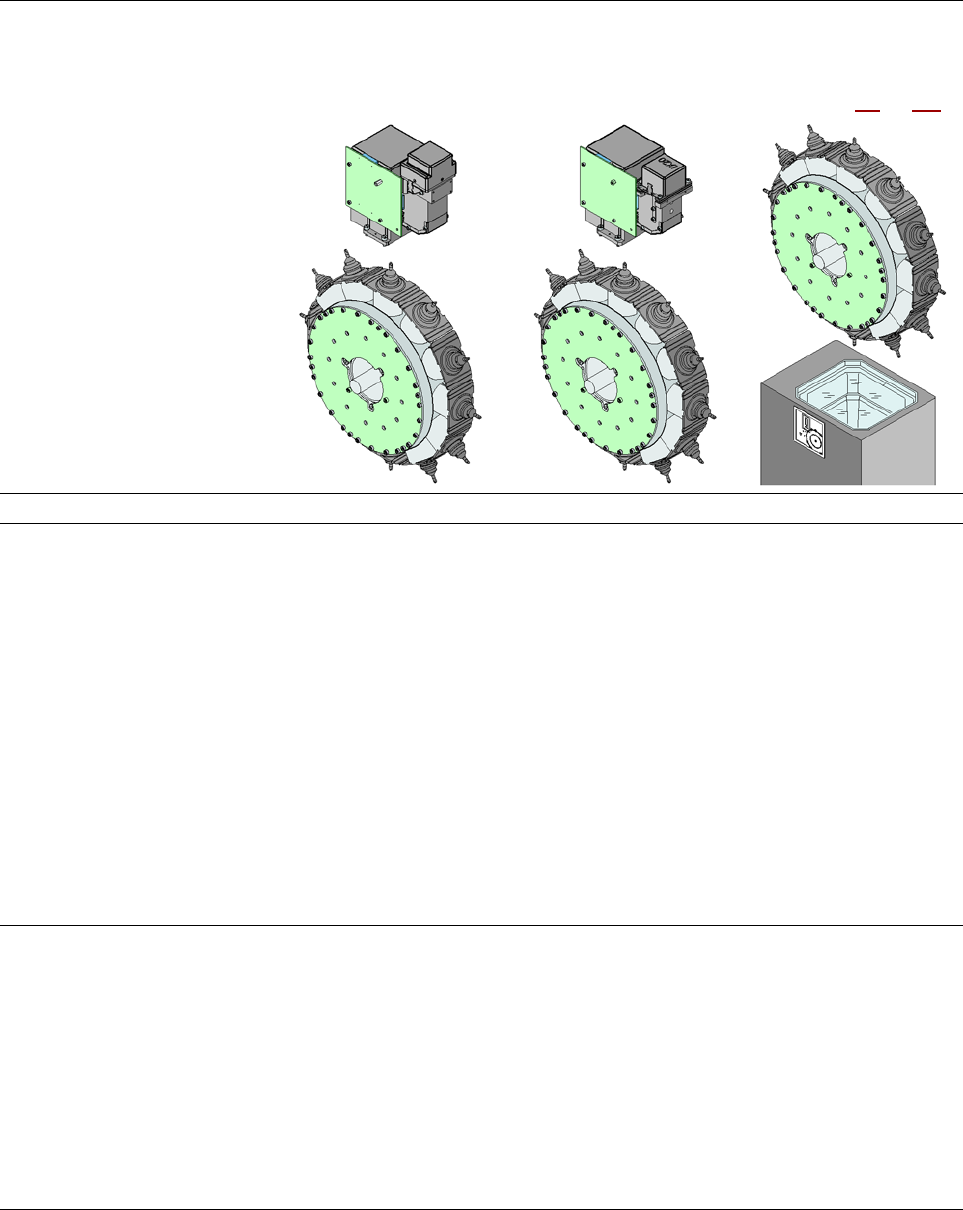
3.5.2.9 Dane techniczne
3
Głowica CPP: centrowanie
optyczne cyfrową kamerą
do podzespołów wysokiej
rozdzielczości, typ 30,
27 x 27
Głowica CPP: centrowanie
optyczne cyfrową kamerą
do podzespołów wysokiej
rozdzielczości, typ 38,
16 x 16
Głowica CPP: centrowanie
optyczne cyfrową stacjo-
narną kamerą do podze-
społów, typ 33, 55 x 45,
(patrz punkt 6.7
, S. 406)
Gama podzespołów
a
01005
b
- 27 x 27 mm² 01005
b
- 16 x 16 mm² 0402 - 50 x 40 mm²
Specyfikacja podzespołów
Maks. wysokość 8,5 mm / 6 mm
c
8,5 mm / 6 mm
c
11,5 mm
Min. raster nóżek 0,3mm 0,25mm 0,3mm
Min. szerokość nóżek 0,15mm 0,1mm 0,15mm
Min. raster kulek 0,25 mm dla podzespołów
< 18 x 18 mm²
0,35 mm dla podzespołów
≥ 18 x 18 mm²
0,25mm 0,35mm
Min. odstęp między kulkami 0,14 mm dla podzespołów
< 18 x 18 mm²
0,2 mm dla podzespołów
≥ 18 x 18 mm²
0,14mm 0,2 mm
Min. wymiary gabarytowe 0,4 x 0,2 mm² 0,4 x 0,2 mm² 1,0 x 0,5 mm²
Maks. wymiary gabarytowe 27 x 27 mm² 16 x 16 mm² 50 x 40 mm²
Maks. ciężar 4 g 4 g 8 g
Siła osadzania
w trybie czujnika prądowego
(zredukowana wydajność
uzbrajania)
1 N ... 3,0 N ± 0,5 N
w trybie zapory świetlnej 2,2 N + 1,2 N - 0,5 N
w trybie wysokiej prędkości
w ramach trybu czujnika prą-
dowego
2,2 N ± 0,5 N
w trybie czujnika prądowego
(zredukowana wydajność
uzbrajania)
3,0 N ... 10,0 N ± 15%