Specification SIPLACE X-Series规格说明书2.pdf - 第13页
13 Placement Heads Standard Functions / Options SIPLACE SpeedStar (C&P20) SIPLACE MultiStar (CPP) S tandard functions High-resolution head came ra, vacuum sensor , force measure- ment, component sensor , inte- grated…
12
Placement Heads
Overview
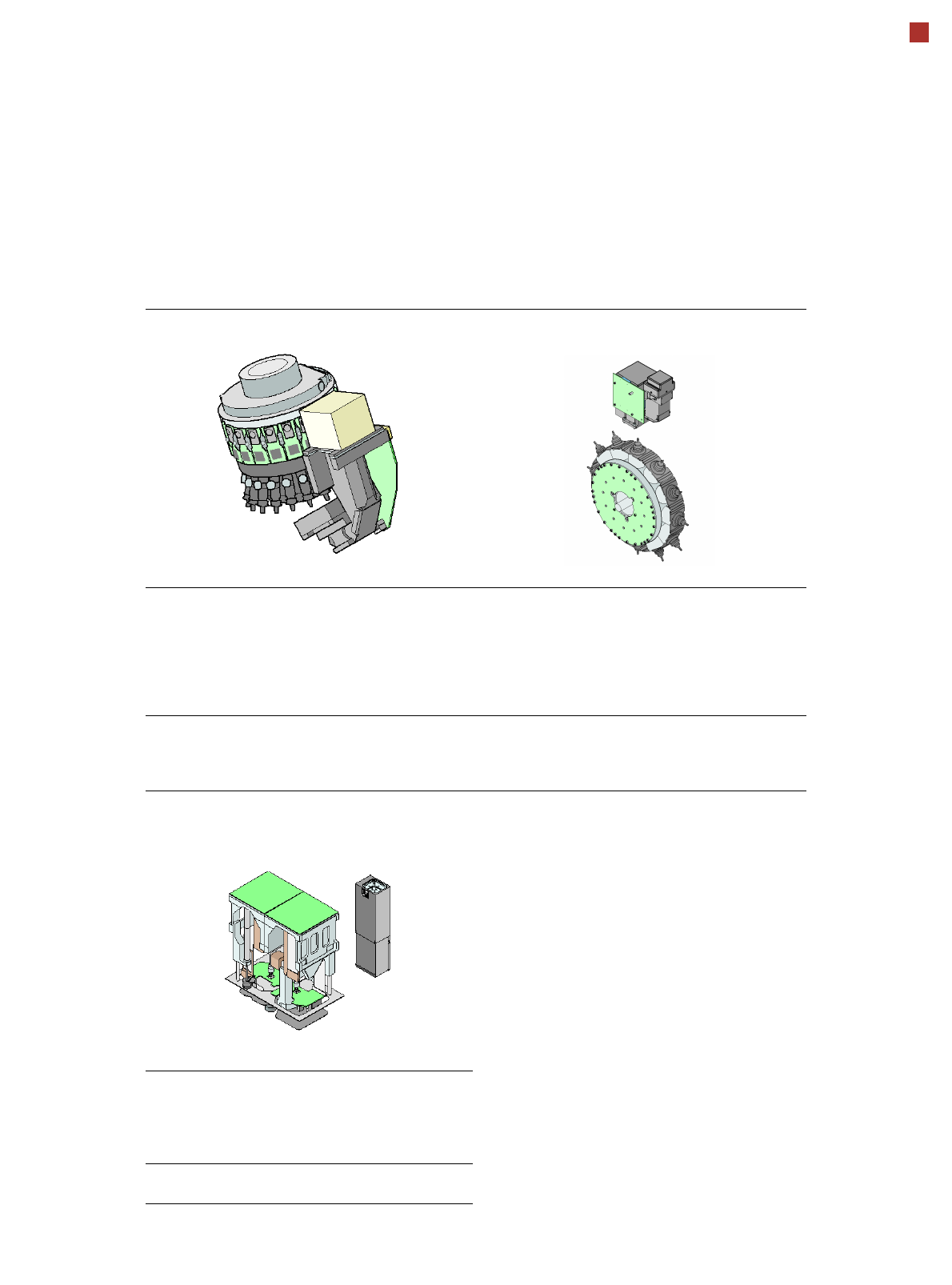
Head modularity
The SIPLACE X series is
characterized by maximum
flexibility in the production
process. This flexibility is
partly due to the head modu-
larity of the placement
machines as it allows differ-
ent placement head variants
to be configured to suit the
production requirements.
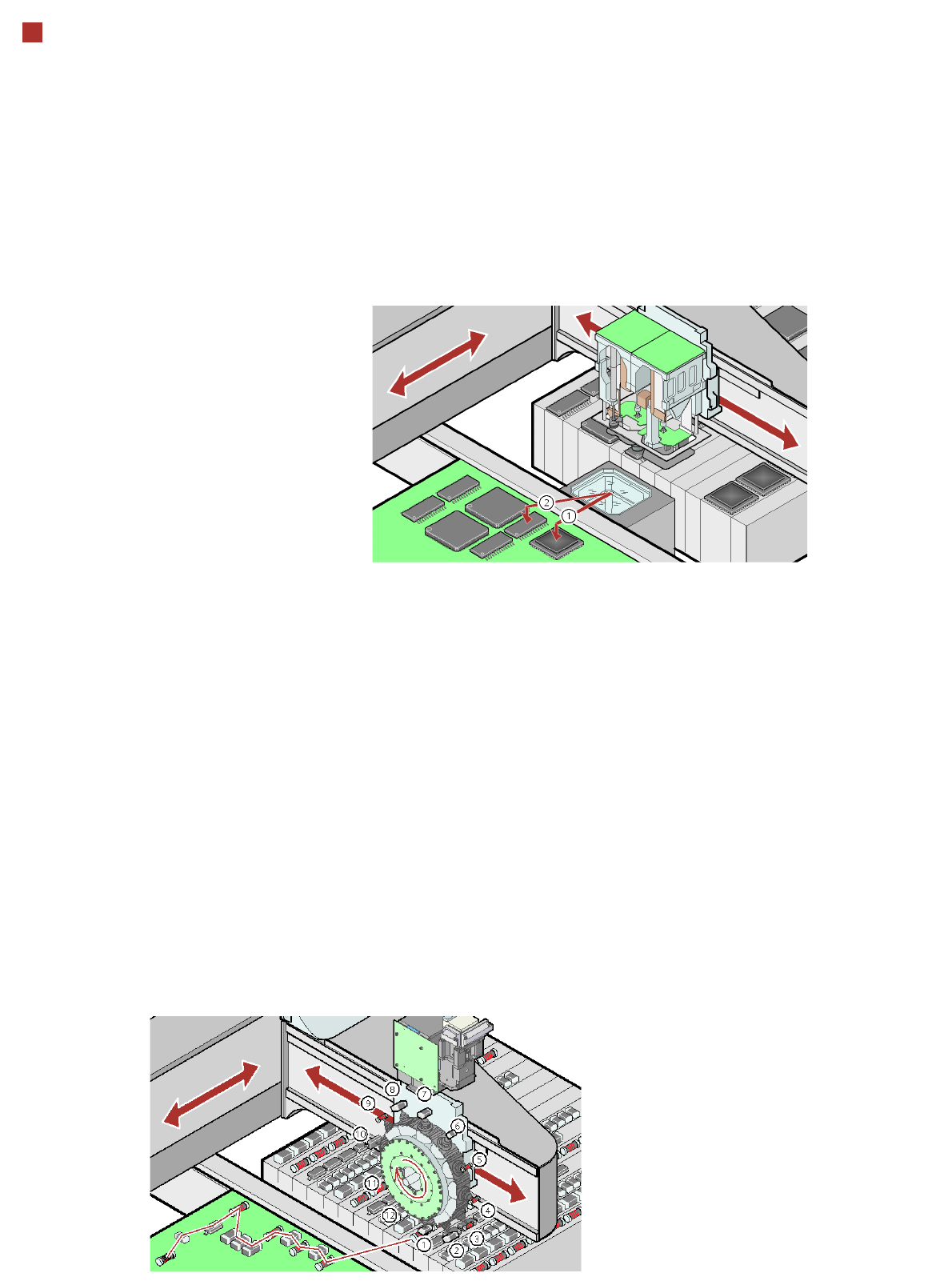
Collect&Place principle
The SIPLACE SpeedStar
works on the Collect & Place
principle. This means that,
within each cycle, 20 compo-
nents are picked up or “col-
lected”, are optically cen-
tered on the way to the board
and are rotated into the
required placement position.
They are then placed gently
and accurately on the PCB.
This principle is particularly
suitable for the high-speed
placement of standard com-
ponents.
Pick&Place principle
The high-precision SIPLACE
TwinStar, which consists of
two Pick&Place placement
modules of the same design,
works on the Pick&Place
principle. Two components
are picked up by the place-
ment head, optically cen-
tered on the way to the
placement position and
rotated into the necessary
placement angle. This princi-
ple has proved particularly
suitable for fast and accurate
placement of special compo-
nents in the fine pitch and
super-fine pitch range, and
for complex and heavy com-
ponents that require grip-
pers, for example.
Mixed Mode
The new SIPLACE MultiStar
works with both the Collect&
Place and the Pick&Place
principle. In mixed mode, it
can combine these two
modes (which were previ-
ously kept strictly separate)
in a single placement cycle.
Checking and self-learning
functions
The SIPLACE placement
heads' reliability can be fur-
ther increased with various
checking and self-learning
functions.
• Component sensors
check for the presence of
a component at the nozzle
before and after the pick-
up and placement pro-
cess.
• Digital cameras check the
position of each compo-
nent at the nozzle. Any
deviations from the
required pick-up position
are corrected before
placement takes place.
• Force sensors monitor the
specified component set-
down forces. With the sen-
sor stop method, differ-
ences in height during
pick-up and any warping
of the PCB are compen-
sated during placement.
• Vacuum sensors check
whether the component
was picked up or set down
correctly.
13
Placement Heads
Standard Functions / Options
SIPLACE SpeedStar (C&P20) SIPLACE MultiStar (CPP)
Standard
functions
High-resolution head camera,
vacuum sensor, force measure-
ment, component sensor, inte-
grated turning station for each
segment, PCB warpage check,
individual recording for each
component
Standard
functions
High-resolution head camera,
vacuum sensor, force measure-
ment, component sensor, inte-
grated turning station for each
segment, PCB warpage check,
individual recording for each
component
Options Nozzle changer, special nozzles Options Nozzle changer, special noz-
zles, high-resolution head cam-
era for 01005 components,
stationary fine-pitch camera
SIPLACE TwinStar (TH)
Standard
functions
Stationary fine-pitch camera,
vacuum sensor, force measure-
ment, nozzle changer, PCB war-
page check, individual recording
for each component
Options Stationary flip-chip camera, spe-
cial nozzles, grippers

14
Placement Heads
Collect&Place Heads
SIPLACE SpeedStar
CO camera type 23
C&P20)
SIPLACE MultiStar
CO camera type 30
(CPP)
SIPLACE MultiStar
CO camera type 33
(CPP)
Component range
a
a) Please note that the range of components that can be placed is also affected by the pad geometry,
customer-specific standards, component packaging tolerances and component tolerances.
01005 to 2220, Melf,
SOT, SOD
01005 to
27 x 27 mm²
0402 to
50 x 40 mm²
Component spec.
max. height
min. lead pitch
min. lead width
min. ball pitch
min. ball diameter
min. dimensions
max. dimensions
max. weight
4 mm
0.25 mm
0.1 mm
0.4 mm
0.2 mm
0.4 x 0.2 mm²
6 x 6 mm²
1 g
8.5 mm / 6 mm
b
0.3 mm
0.15 mm
0.25 mm
c
0.35 mm
d
0.14 mm
c
0.2 mm
d
0.4 x 0.2 mm²
27 x 27 mm²
4 g
b) CPP head in low assembly position: stationary component camera cannot be used here.
c) For components < 18x18 mm².
d) For components 18x18 mm².
11.5 mm
0.3 mm
0.15 mm
0.35 mm
0.2 mm
1.0 x 0.5 mm²
50 x 40 mm²
8 g
Programmable set-
down force
1.5 N - 4.5 N 1.0 N - 10 N 1.0 N - 10 N
Nozzle types 10xx, 11xx, 12xx 20xx, 28xx 20xx, 28xx
X/Y accuracy
e
e) The accuracy value was measured using the vendor-neutral IPC standard.
± 41 µm/3
± 55 µm/4
± 41 µm/3
± 55 µm/4
± 34 µm/3
± 45 µm/4
Angular accuracy ± 0.5°/3
± 0.7°/4
± 0.4°/3
f
, ± 0.5°/3
g
± 0.5°/4
f
, ± 0.7°/4
g
f) For components between 6 x 6 mm² and 27 x 27 mm².
g) For components smaller than 6 x 6 mm².
± 0.2°/3
± 0.3°/4
Illumination levels 5 5 6
Possible illumination
level settings
256
5
256
5
256
6