00193921-01.pdf - 第102页
3 Technische Daten Betriebsanleitung SIPLACE H F-Serie 3.6 Bestückk öpfe Softwareversion SR.505.xx Ausgabe 05/2004 D E 102 Chipsh ootern roti eren die zwölf Pipette n der SIP LACE C ollect& Place-Köp fe um eine horiz…
Betriebsanleitung SIPLACE HF-Serie 3 Technische Daten
Softwareversion SR.505.xx Ausgabe 05/2004 DE 3.6 Bestückköpfe
101
3
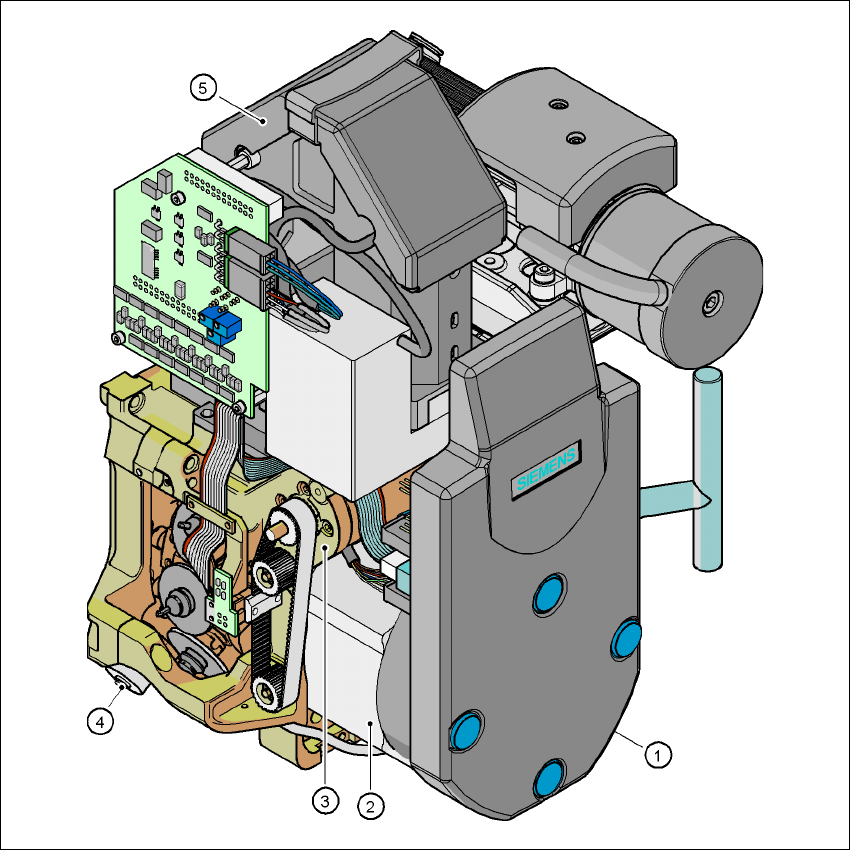
Abb. 3.6 - 4 12-Segment-Collect&Place-Kopf - Funktionsgruppen Teil 2
3
(1)Zwischenverteilerplatine (unter der Abdeckung)
(2)Sternantrieb - DR-Motor
(3)Z-Achsenmotor
(4)Ventilstellantrieb
(5)BE-Kamera 24 x 24
3.6.2.1 Beschreibung
Der 12-Segment-Collect&Place-Kopf arbeitet nach dem Collect&Place Prinzip, d.h. innerhalb ei-
nes Zyklus werden zwölf Bauelemente vom Bestückkopf abgeholt, auf dem Weg zur Bestückpo-
sition optisch zentriert und in die erforderliche Bestücklage gedreht. Danach werden sie mit Hilfe
von Blasluft sanft und positionsgenau auf die Leiterplatte abgesetzt. Im Gegensatz zu klassischen

3 Technische Daten Betriebsanleitung SIPLACE HF-Serie
3.6 Bestückköpfe Softwareversion SR.505.xx Ausgabe 05/2004 DE
102
Chipshootern rotieren die zwölf Pipetten der SIPLACE Collect&Place-Köpfe um eine horizontale
Achse. Das ist nicht nur platzsparend: durch den kleinen Durchmesser treten im Vergleich zu klas-
sischen Chipshootern wesentlich geringere Fliehkräfte auf. So wird die Gefahr eines Verrut-
schens von Bauelementen während des Transport weitgehend gebannt.
Dazu kommt noch ein weiteres Plus: die Taktzeit des Collect&Place-Kopfes ist für alle Bauele-
mente gleich. Das bedeutet, dass die Bestückleistung unabhängig von der Bauelementegröße ist.
Kontroll- und Selflearning-Funktionen 3
Verschiedene Kontroll- und Selflearning-Funktionen steigern die Zuverlässigkeit des Collect&
Place-Kopfes.
– Vakuumprüfungen an den Pipetten zeigen beispielsweise an, ob das Bauelement korrekt ab-
geholt oder abgesetzt wurde.
– Über eine Markierung auf dem Förderer wird die exakte Abholposition der Bauelemente auf
dem Förderer ermittelt.
– Eine BE-Kamera am Bestückkopf bestimmt die genaue Lage jedes BE an der Pipette. Abwei-
chungen von der Abholposition werden bereits vor dem Bestücken korrigiert. Bei der weiteren
BE-Aufnahme wird der Durchschnitt der Abweichungen bei den letzten 10 Bestückvorgängen
berücksichtigt. So wird die Aufnahme-Genauigkeit weiter erhöht.
– Des weiteren wird auch die Gehäuseform überprüft. Weichen die ermittelten geometrischen
Daten von den programmierten Daten ab, wird das Bauelement nicht bestückt.
– Die Vertikalachse (Z-Achse) zum Abholen und Bestücken der BE arbeitet im Sensor-Stopp-
Modus. Dadurch werden Höhendifferenzen beim Abholen und Leiterplattenunebenheiten beim
Bestücken ausgeglichen. Der Durchschnitt der Abweichungen bei den letzten 10 Bestückvor-
gängen wird für die Anpassung der weiteren Hub- und Bestückgeschwindigkeit ebenfalls be-
rücksichtigt. Die programmierte Aufsetzkraft bleibt indes immer konstant.
– Zur Erhöhung der Bestücksicherheit kann ein Bauelementesensor am C&P-Kopf installiert
werden. Der BE-Sensor überprüft neben der Anwesenheit des BE an der Pipette auch das
Kantenverhältnis der Bauelemente. Auf diese Weise wird ermittelt, ob das BE quer oder hoch-
kant von der Pipette aufgenommen worden ist.
– Mit Hilfe des optionalen DCA-Visionmoduls kann der 12-Segment-Collect&Place-Kopf Baue-
lemente der Größe 0,6 x 0,3 mm² bis 13 x 13 mm² optisch zentrieren und bestücken. Beim Be-
stücken von High-Speed Flip-Chips und Bare-Die - Bauelementen optimiert das DCA-
Visionmodul die Geschwindigkeit und die Genauigkeit. Die Werte finden Sie in der Tabelle auf
Seite 104
.
3.6.2.2 Funktionsbeschreibung
Der 12-Segment-Collect&Place-Kopf besitzt drei Achsen, die DR- oder Sternachse, die Z- und die
DP-Achse.
Betriebsanleitung SIPLACE HF-Serie 3 Technische Daten
Softwareversion SR.505.xx Ausgabe 05/2004 DE 3.6 Bestückköpfe
103
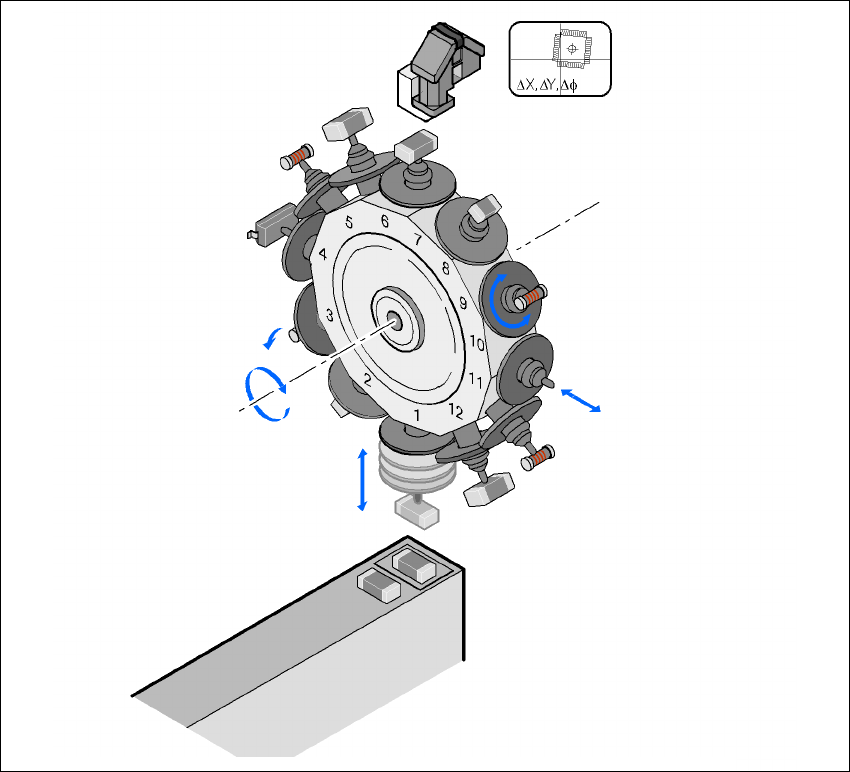
Der Stern rotiert mit seinen 12 Segmenten um die Stern-Achse. Die Segmente sind Träger der
Pinolen. Auf jeder Pinole sitzt eine Pipette. Damit werden die Bauelemente angesaugt und von
der Abhol-/Bestückposition (1), zur Abwurfposition (3), zur optischen Zentrierposition (7) oder zur
Drehposition (9) transportiert.
Die Z-Achse führt eine Vertikalbewegung aus. Jede Pinole, die sich in der untersten Stellung des
Sterns befindet (1), wird von dieser Achse angehoben oder abgesenkt. Damit werden die Baue-
lemente von den Förderern abgeholt und auf die Leiterplatte abgesetzt. Die Z-Achse ist eine so
genannte „intelligente Achse“. Sie „merkt sich“ die Abholhöhe einer jeden Fördererspur und die
Bestückhöhe für jedes Bauelement. So lässt sich der Bestückprozess beschleunigen. Die pro-
grammierte Aufsetzkraft bleibt konstant.
3
Abb. 3.6 - 5 Funktionsbeschreibung
Die DP-Achse dreht das optisch zentrierte Bauelement in die gewünschte Bestücklage. Die Be-
wegungsabläufe der Rotations- und auch der Translationsachsen werden von Regelkreisen ge-
steuert. Sensoren für Position und Geschwindigkeit übermitteln die Istwerte der Achsbewegung
an die Achsansteuerung. Aus dem Vergleich der Soll- und Istwerte werden die Kraft- und Ge-
BE-Kamera
DP-Achse
BE in Bestück-
lage drehen
Pinole abziehen
oder einsetzen
Z-Achse
BE abholen
oder bestücken
Stern-Achse
Sternrotation
BE abwerfen