0197786-01_BA_HeadVerification_708_DE.pdf - 第53页
SIPLACE „Head Ver ification“ Bedienungsanleitun g Ausgabe 01/2015 53 oberen bzw. untere n Position im Winkel 0° durchgefüh rt, es kann sc hnell der grobe Of fset eines Segments erm ittelt werden, um weitere Messu ngen au…
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
52
Punkt 3:
Hier kann man sehen, wie sich der Wert Z down delta pick [ms] aus den beiden Grenzwerten Z min
pick [ms] und Z max pick [max] ergibt. Ein Wert, der in Richtung des oberen Grenzwertes (in diesem
Beispiel 150µm) geht, deutet auf ein Problem mit der Linearführung des Segmentes hin.
Punkt 4:
Hier kann man sehen, wie sich der Wert Z down delta place [ms] aus den beiden Grenzwerten Z min
place [ms] und Z max place [max] ergibt. Ein Wert, der in Richtung des oberen Grenzwertes (in
diesem Beispiel 150µm) geht, deutet auf ein Problem mit der Linearführung des Segmentes hin.
4.8.4 Deutung der Ergebnisse
Fehler bei Z down delta pick [µm] und Z down delta place [µm] an allen Segmenten:
1. Z-Motor defekt Austausch Z-Motor
2. Linearführung des Z-Motor schwergängig Austausch Z-Motor
3. Leseeinheit Z-Motor verschmutzt Reinigung des Leseeinheit
4. Lichtschranke Z-Unten verschmutzt / defekt Reinigen / Tausch der Lichtschranke
Fehler bei Z down delta pick [µm] oder Z down delta place [µm] an einzelnen Segmenten:
1. Linearführung der DP schwergängig Austausch DP
2. Linearführung des Segments schwergängig Austausch Linearführung Segment
3. Anti glare shield defekt oder schlecht montiert Austausch Anti glare shield
4. Lichtschranke im Segment verschmutzt Reinigen der LS durch das Fenster
Fehler bei Min DP time [ms] oder Max DP time [ms] an einzelnen Segmenten:
1. Internes Problem der DP/Segment Austausch DP/Segment
4.9 Messung „Segment offset up & down (fast)“
Für diese Messungen werden folgende Teile benötigt:
CPP: 12x Nozzletype 2057 03070280-01 (Kalibrierpipette)
CPP: Kalibrierteil CPP 03010565-01
CP20P: 20x Nozzletype 4235 03098748-01 (Kalibrierpipette)
CP20A: 20x Nozzletype 1235 03015222-01 (Kalibrierpipette)
C&P20A/P: Kalibrierteil 03034148-01
4.9.1 Erklärung der Messung – Ablauf
Mit der Messung „Segment offset up & down (fast)“ wird ein Schnelltest gemacht, inwiefern sich ein
Segment außerhalb seiner Rotationsachse befindet, also verbogen ist. Falls bei dieser Vermessung
ein Segment außerhalb der Grenzwerte ist, also zu sehr verbogen ist, so werden alle nachfolgenden
Messung abgebrochen, da der Kopf (also durch dieses Segment) nicht mehr in einem
Produktionsfähigen Zustand ist. Das Segment muss sofort ausgetauscht werden, um weitere Messung
sinnvoll durchführen zu können.
Diese Aussermittigkeit der Segmentmitte zur Mitte der Kamera wird als Segmentoffset bezeichnet. Es
gibt einen Segment offset up, welcher die Rotation (Offset) des Segmentes im eingefahrenen Zustand
zur Bauelementekamera beschreibt. Der Segment offset unten beschreibt dann die Rotation des
Segmentes in der unteren Position. Diese Position beschreibt dann die Aussermittigkeit der
Segmentachse in der Abhol- bzw. Bestückposition, somit dem Offset zwischen Bauelemente- und
Leiterplattenkamera. Diese Vermessung ist wichtig, damit die Maschine beim Abholen bzw. Bestücken
diesen Versatz in die Sollpositionen miteinrechnen kann und somit erhöht sich die Abhol- bzw.
Bestückgenauigkeit. Die Messung „Segment offset up & down (fast)“ wird für jedes Segment in der

SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
53
oberen bzw. unteren Position im Winkel 0° durchgeführt, es kann schnell der grobe Offset eines
Segments ermittelt werden, um weitere Messungen aufgrund eines defekten Segments
auszuschließen.
Mithilfe der Ergebnisse dieser Messungen können letztendlich auf folgende Ursachen Rückschlüsse
gezogen werden:
1. Verbogene Segmente
2. Defekte Z-Linearführungen der DP / Segmente (ausgeschlagen / locker)
Ablauf der Messung im Detail:
1. Zuerst wird die Position des Kalibrierteils in der Kalibrierteilablage als Istposition mit der
Leiterplattenkamera ermittelt, die exakte Lage des Kalibrierteils in der Kalibrierteiltasche ist
somit bestimmt und man kennt somit die genaue Mitte und Lage des Kalibrierteils, die als
Abholposition nun übernommen wird. Diese Mitte wird anhand der 4 Punkte in den Ecken des
Kalibrierteiles ermittelt.
2. Nun fährt Segment 1 mit einem Winkel von 0° nach unten und holt das Kalibrierteil an der
vorher ermittelten Abholposition (Kalibrierteilmitte) ab.
3. Das Segment 1 wird nach oben gefahren.
4. Das Segment 1 wird durch den Stern über die Bauelementekamera gedreht.
5. Die Bauelementekamera ermittelt durch Vermessen der vier Kalibrierteilstrukturmarken exakt
die Position des Kalibrierteils zur Kameramitte, das Kalibrierteil wird somit optisch zentriert.
Die hier ermittelten Offsetwerte werden mit Up X [µm] und Up Y [µm] gespeichert. Dieser
Wert beschreibt nun die Aussermittigkeit des Kalibrierteiles zur Kameramitte. . Dieser Wert
ergibt nun den Segment Offset Up für das Segment 1 bei 0°, da man davon ausgeht, dass das
Segment 1 exakt das Kalibrierteil in der Mitte abgeholt hat. Die ermittelten Offsetwerte werden
als Korrekturwerte in die folgende Bestückung (Ablegen) des Kalibrierteils (Kalibrierteilablage)
eingerechnet.
6. Nun dreht der Stern das Segment mit dem Kalibrierteil wieder zurück in die Bestückposition.
7. Das Segment 1 wird mit der Z-Achse nach unten gefahren und legt das Kalibrierteil wieder mit
0° (Winkel DP/Segment) und den ermittelten korrigierten Offsetwerten Up X [µm] und Up Y
[µm] als Bestückposition in der Kalibrierteilablage ab.
8. Nun fährt die Leiterplattenkamera über das Kalibrierteil und ermittelt nun erneut anhand der
vier Punkte in den Kalibrierteilecken die exakte Lage des Kalibrierteiles in der
Kalibrierteilablage. Es ergeben sich Offsetwerte Down X [µm] und Down Y [µm], welche nun
die Aussermittigkeit des Kalibrierteiles zur Leiterplattenkameramitte beschreiben. Dieser Wert
beschreibt genau den Offset der Segmentmitte von Segment 1 bei einem Bestückwinkel von
0°, wenn das Segment 1 in der Bestückposition ist. Somit hat man einen exakten Verzug des
Segment 1 bei einem Bestückwinkel von 0° ermittelt, der beschreibt, wie sehr die Z-
Linearführung die Position von Segment oben nach Segment unten verändert. Die
Abweichung beschreibt auch den Offset der Baueelementekamera zur Leiterplattenkamera für
dieses Segment.
9. Diese ermittelten Werte für Segment 1 Down X [µm] und Down Y [µm] werden als Absolut 0
für alle weiteren Berechnungen aller Segmentoffsets verwendet. Der Segment offset down für
Segment 1 ist der Bezugswert, da alle anderen Segmentoffsets aller Segmente sich auf
diesen Ausgangwert beziehen.
10. Die ermittelte Kalibrierteilposition der vormaligen Messung wird nun wieder als Istposition
(Abholposition) für die folgende Messung verwendet.
11. Nun holt Segment 2 mit 0° ab.
12. Die Schritte 2.-10. werden für alle Segment durchgeführt.
13. Das Kalibrierteil bleibt während der gesamten Segmentoffset Messung mit 0° liegen, es
verändert seinen Winkel nicht!
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
54
4.9.2 Erklärung des Messergebnisses im Menü Progress
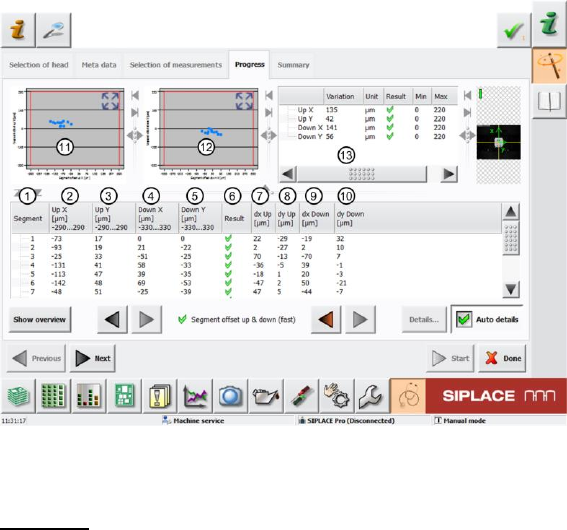
Nach Beendigung der Messung erscheint im Menü Progress folgendes Ergebnis:
Abbildung 36: Ergebnis Segment offset up and down (fast)
Legende:
1. Gemessenes Segment
2. Errechneter Segmentoffset Oben Wert Up X [µm] aus der Winkelmessung 0°. Diese
Abweichung wird im Wert dx Up [µm] (7) als tatsächlicher gemessener Segmentoffset zur
Bauelementekamera-Mitte ermittelt. Der kalkulierte Segmentoffset Oben Wert Up X [µm]
ergibt sich dann rechnerisch aus dem Offset zwischen Bauelemente- und
Leiterplattenkamera.
Die ermittelten Segmentoffsetwerte Up X [µm] müssen immer in einem bestimmten
Toleranzbereich (in unserem Beispiel -290..290µm) liegen. Dieser Wert definiert einen
zulässigen Segmentoffset innerhalb der Konstruktions- und Fertigungstoleranzen, welche die
Software noch kompensieren kann. Liegt der ermittelte Segmentoffsetwert außerhalb der
Toleranzen, so kann davon ausgegangen werden, dass auf das Segment eine mechanische
Verformung gewirkt hat, somit das Segment verbogen ist und nicht mehr genau damit
Bestückt werden kann.
3. Errechneter Segmentoffset Oben Wert Up Y [µm] aus der Winkelmessung 0°. Diese
Abweichung wird im Wert dy Up [µm] (8) als tatsächlicher gemessener Segmentoffset zur
Bauelementekamera-Mitte ermittelt. Der kalkulierte Segmentoffset Oben Wert Up Y [µm]
ergibt sich dann rechnerisch aus dem Offset zwischen Bauelemente- und
Leiterplattenkamera.
Die ermittelten Segmentoffsetwerte Up Y [µm] müssen immer in einem bestimmten
Toleranzbereich (in unserem Beispiel -290..290µm) liegen. Dieser Wert definiert einen
zulässigen Segmentoffset innerhalb der Konstruktions- und Fertigungstoleranzen, welche die
Software noch kompensieren kann. Liegt der ermittelte Segmentoffsetwert außerhalb der
Toleranzen, so kann davon ausgegangen werden, dass auf das Segment eine mechanische
Verformung gewirkt hat, somit das Segment verbogen ist und nicht mehr genau damit
Bestückt werden kann.
4. Errechneter Segmentoffset Unten Wert Down X [µm] aus der Winkelmessung 0°. Dieser Wert
ergibt sich aus dem tatsächlichen Segmentoffset Unten Wert dx Down [µm] für dieses
Segment. Dieser Offset wird im Wert dx Down [µm] (9) abgebildet.
Die ermittelten Segmentoffsetwerte Down X [µm] müssen immer in einem bestimmten
Toleranzbereich (in unserem Beispiel -330..330µm) liegen. Dieser Wert definiert einen
zulässigen Segmentoffset innerhalb der Konstruktions- und Fertigungstoleranzen, welche die
Software noch kompensieren kann. Liegt der ermittelte Segmentoffsetwert außerhalb der
Toleranzen, so kann davon ausgegangen werden, dass auf das Segment eine mechanische
Verformung gewirkt hat, somit das Segment verbogen ist und nicht mehr genau damit
Bestückt werden kann.