0197786-01_BA_HeadVerification_708_DE.pdf - 第58页
SIPLACE „Head Ver ification“ Bedienungsanleitun g Ausgabe 01/2015 58 4.9.4 Deutung der Ergebnisse Fehler bei Up X [µm] und Up Y [µm] an allen Segm ente n: 1. Überprüf ung Sternnullpunk tkorr ektur Fehler bei Dow n X [µm]…
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
57
Variation Up X [µm] = -160µm – (-25µm) = |135µm|
Der Wert Variation Up Y [µm] (3) veranschaulicht die maximale Streuung zwischen den Segmenten
bei Segmentoffset Up in Y-Richtung.
Der Wert Variation Up Y [µm] errechnet sich wie folgt:
Variation Up Y [µm] = Up Y max [µm] – Up Y min [µm]
Variation Up Y[µm] = 57µm – 15µm = |42µm|
Der Wert Variation Down X [µm] (4) veranschaulicht die maximale Streuung zwischen den Segmenten
bei Segmentoffset Down in X-Richtung.
Der Wert Variation Down X [µm] errechnet sich wie folgt:
Variation Down X [µm] = Down X max [µm] – Down X min [µm]
Variation Down X [µm] = 90µm – (-51µm) = |141µm|
Der Wert Variation Down Y [µm] (4) veranschaulicht die maximale Streuung zwischen den Segmenten
bei Segmentoffset Down in Y-Richtung.
Der Wert Variation Down Y [µm] errechnet sich wie folgt:
Variation Down Y [µm] = Down Y max [µm] – Down Y min [µm]
Variation Down Y [µm] = 0µm – (-56µm) = |56µm|
Der Wert Down X [µm] der Segmente n+1 bezieht sich auf das Segment 1. Der tatsächlich
gemessene Segmentoffset für Segment 1 zur Leiterplattenkamera wird mit dx Down [µm] = -19µm
ermittelt. Der Wert -19µm wird als Bezugswert 0µm gesetzt und ergibt somit Down X [µm] = 0µm für
Segment 1.
Alle weiteren Segmentoffset Werte Down X [µm] werden in Abhängigkeit zum Bezugssegment 1
errechnet.
Dies geschieht mit der Formel:
Down X [µm] Seg (n) = dx Down [µm] Seg (n) - dx Down [µm] Seg 1
In unserem Beispiel (6) für Segment 8 errechnet sich der Wert Down X[µm] Seg 8 wie folgt:
Down X[µm] Seg 8 = 71µm – (-19µm) = 90µm
Der Wert Down Y [µm] der Segmente n+1 bezieht sich auf das Segment 1. Der tatsächlich
gemessene Segmentoffset für Segment 1 zur Leiterplattenkamera wird mit dy Down [µm] = 32µm
ermittelt. Der Wert 32µm wird als Bezugswert 0µm gesetzt und ergibt somit Down Y [µm] = 0µm für
Segment 1.
Alle weiteren Segmentoffset Werte Down Y [µm] werden in Abhängigkeit zum Bezugssegment 1
errechnet.
Dies geschieht mit der Formel:
Down Y [µm] Seg (n) = dy Down [µm] Seg (n) - dy Down [µm] Seg 1
In unserem Beispiel (7) für Segment 8 errechnet sich der Wert Down Y [µm] Seg 8 wie folgt:
Down Y [µm] Seg 8 = -24µm – 32µm = -56µm
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
58
4.9.4 Deutung der Ergebnisse
Fehler bei Up X [µm] und Up Y [µm] an allen Segmenten:
1. Überprüfung Sternnullpunktkorrektur
Fehler bei Down X [µm] und Down Y [µm] an allen Segmenten:
1. Linearführung der Z-Achse locker oder defekt Überprüfen oder Tausch des Z-Motors
Fehler bei Up X [µm] / Up Y [µm] / Down X [µm] / Down Y [µm] an einzelnen Segmenten:
1. Segment verbogen, eventuell nach einem Crash Austausch Segment / DP
2. Linearführung DP/Segment ausgeschlagen Tausch der DP / Tausch der Linearführung des
Segments
4.10 Messung „Filter disc“
Diese Messung wird nur am Bestückkopf CP20A durchgeführt.
Diese Messung findet ohne Pipetten an den Segmenten statt
4.10.1 Erklärung der Messung – Ablauf
Mit dieser Messung werden die Filterscheiben an den Segmenten des CP20A-Kopfes überprüft.
Diese Filterscheiben dichten die Schnittstelle zwischen dem DP und der Pipette ab, garantieren somit
ein zuverlässiges Vakuum zur Pipette und schützen zudem den Vakuumkreislauf vor einer
Verunreinigung.
Zuerst legt die Maschine alle Pipetten im Wechsler ab.
Danach wird jedes Segment mit einer Blasluft von 400mbar beaufschlagt.
Diese Blasluft soll locker sitzende und beschädigte Filterscheiben aus dem Sitz in der DP abblasen.
Zudem werden grob verunreinigte Filterscheiben eventuell gereinigt (ausgeblasen).
Im Anschluss werden die Segmente der Reihe nach mit der Bauelementekamera untersucht, ob eine
Filterscheibe montiert ist, oder ob die Filterscheibe verschmutzt ist.
Dabei wird ein digitaler Filter (Maske) über das Kamerabild der Filterscheibe gelegt.
Mithilfe eines Algorithmus wird dabei ausgewertet, inwiefern die digitale Filtermaske die Strukturen der
Filterscheibe im Kamerabild erkennt.
Dabei wird grob eine Hell-Dunkel-Auswertung gefahren. Ist das Kamerabild zu hell im Vergleich zum
eingestellten Wert in der digitalen Filtermaske, so wird die Filterscheibe als Fehlend erkannt. Hier gibt
es einen Grenzwert, der für „Filterscheibe anwesend“ und Filterscheibe fehlt“ steht.
Falls diese Messung erfolgreich war und die Filterscheibe als anwesend erkannt wurde, wird die
digitale Filtermaske nochmals ausgewertet und die Software sucht innerhalb der dunklen Filterscheibe
nach hellen Pixel. Diese hellen Pixel stehen für Verunreinigungen. Wenn diese Verunreinigungen eine
gewissen Pixelanzahl (Pixelgröße) überschreiten, wird die Filterscheibe als verschmutzt markiert.
Mithilfe der Ergebnisse dieser Messungen können letztendlich auf folgende Ursachen Rückschlüsse
gezogen werden:
1. Defekte Filterscheiben
2. Fehlende Filterscheiben
3. Defekter Filterscheibensitz an der DP
SIPLACE „Head Verification“
Bedienungsanleitung Ausgabe 01/2015
59
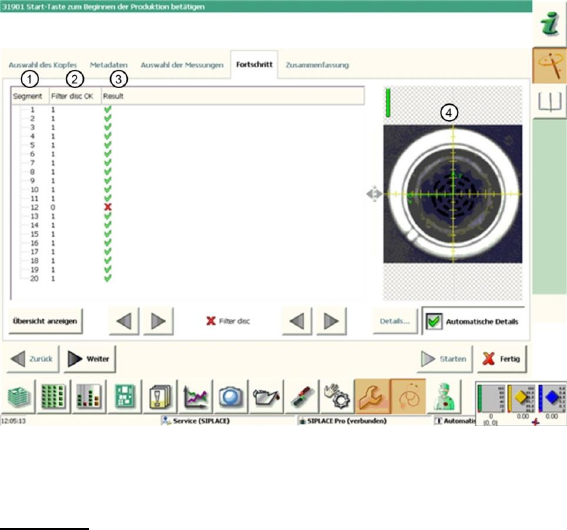
4.10.2 Erklärung des Messergebnisses im Menü Progress
Nach Beendigung der Messung erscheint im Menü Progress folgendes Ergebnis:
Abbildung 39: Ergebnis Filter disc
Legende:
1. Gemessenes Segment
2. Der Wert Filter disc OK hat entweder den Wert 0 oder 1.
Wird das Segment über die Bauelementekamera gedreht, so wird das Kamerabild mit einem
digitalen Filter ausgewertet. Dabei werden die Pixel der Kamera mit den Einstellungen im
digitalen Filter verglichen.
Wird die grobe Filterscheibenstruktur nicht erkannt, so wird die Filterscheibe als Fehlende
gespeichert.
Werden innerhalb der Filterscheibenstruktur dann zu viele helle Pixel entdeckt, so wird die
Filterscheibe als Verschmutzt gespeichert.
Beide Messungen werden zusammengefasst. Wenn eine Messung scheitert, so wird der Wert
Filter disc OK mit 0 hinterlegt, was NOK (nicht in Ordnung) bedeutet.
Wenn beide Messungen in Ordnung sind, wo wird für Filter disc OK der Wert 1 ausgegeben.
3. Der Wert bei Filter disc OK wird hier nochmals besser veranschaulicht.
Ergebnis-Anzeige (OK grüner Hacken / NOK rotes X)
4. Hier wird das Bild angezeigt, in dem man den digitalen Filter über dem Kamerabild der
Filterscheibe sieht. Die blau hinterlegten Strukturen zeigen erkannte Filterscheibenmarken,
die durch den digitalen Filter entdeckt wurden. Beim Anwählen der Segmente in der
Ergebnisübersicht wird das zugehörige Auswertebild mit angezeigt und man kann anhand des
Visiondump erkennen, ob die Filterscheibe fehlt oder „nur“ verschmutzt ist.
Hinweis: Die Visiondumps werden nach dem Erzeugen der PDF oder dem Abschluss der
„Head Verification“ (Done-Button) gelöscht und können somit zur Fehleranalyse nicht mehr
benutzt werden.