00193926-03.pdf - 第128页
3 Dados técnicos Manual do usuário SIPLACE Série HF 3.7 Cabeças de montar Versão de software SR.50x. xx Edição 01/2006 PT 128 3.7.4 SIPLACE T winHead p ara monta gem de PCI de alt a precisão 3 Fig. 3.7 - 9 T winHead para…
Manual do usuário SIPLACE Série HF 3 Dados técnicos
Versão de software SR.50x.xx Edição 01/2006 PT 3.7 Cabeças de montar
127
3.7.3.3 Dados técnicos
3
3
*) Por favor tenha em conta que a gama de CO passíveis de equipar é influenciada também pela geometria do pad,
pela norma específica do cliente e pelas tolerâncias das embalagens de componentes.
Cabeça Collect&Place de
6 segmentos com câmara de
componentes standard (39x39)
Cabeça Collect&Place de
6 segmentos com
câmara DCA
Gama de componentes *) 0603 até 32 x 32 mm² 0201 até Flip-Chip, Bare Die
Especificação do componente
Altura máx.
Retícula mín. dos pinos
Retícula mín. de Ball
Diâmetro mín. de Ball
Dimensões mín.
Dimensões máx.
Peso máx.
8,5 mm
0,5 mm
0,56 mm
0,32 mm
1,6 x 0,8 mm²
32 x 32 mm²
5 g
8,5 mm
0,4 mm
0,2 mm
0,11 mm
0,6 x 0,3 mm²
13 x 13 mm²
5 g
Escalão de força programada
1
2
3
4
5
Força de colocação programada [N]
2,4 ± 0,5
2,4 ± 0,5
3 + 1
4 + 1
5 + 1
Tipos de bocais 8xx, 9xx 8xx, 9xx
Precisão de centragem X/Y ± 45 µm/3 σ, ± 60 µm/4 σ ± 41 µm/3 σ, ± 55 µm/4 σ
Precisão angular ± 0,2°/3 σ, ± 0,3°/4 σ ± 0,2°/3 σ, ± 0,3°/4 σ
3 Dados técnicos Manual do usuário SIPLACE Série HF
3.7 Cabeças de montar Versão de software SR.50x.xx Edição 01/2006 PT
128
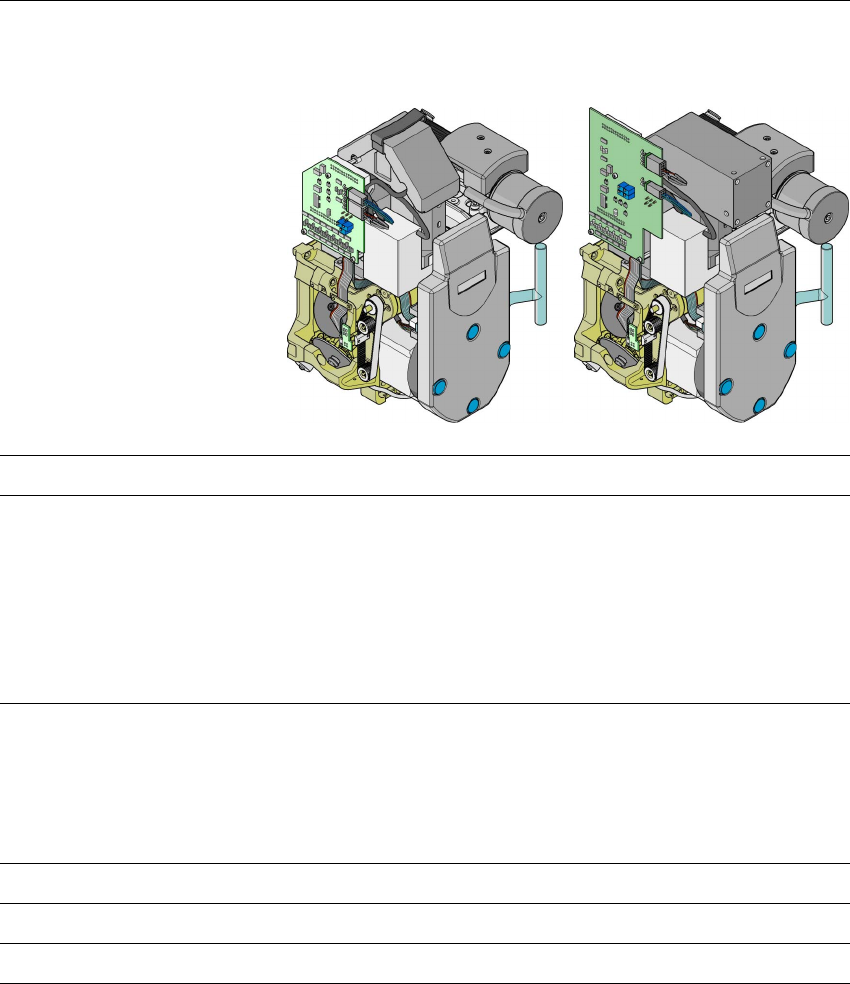
3.7.4 SIPLACE TwinHead para montagem de PCI de alta precisão
3
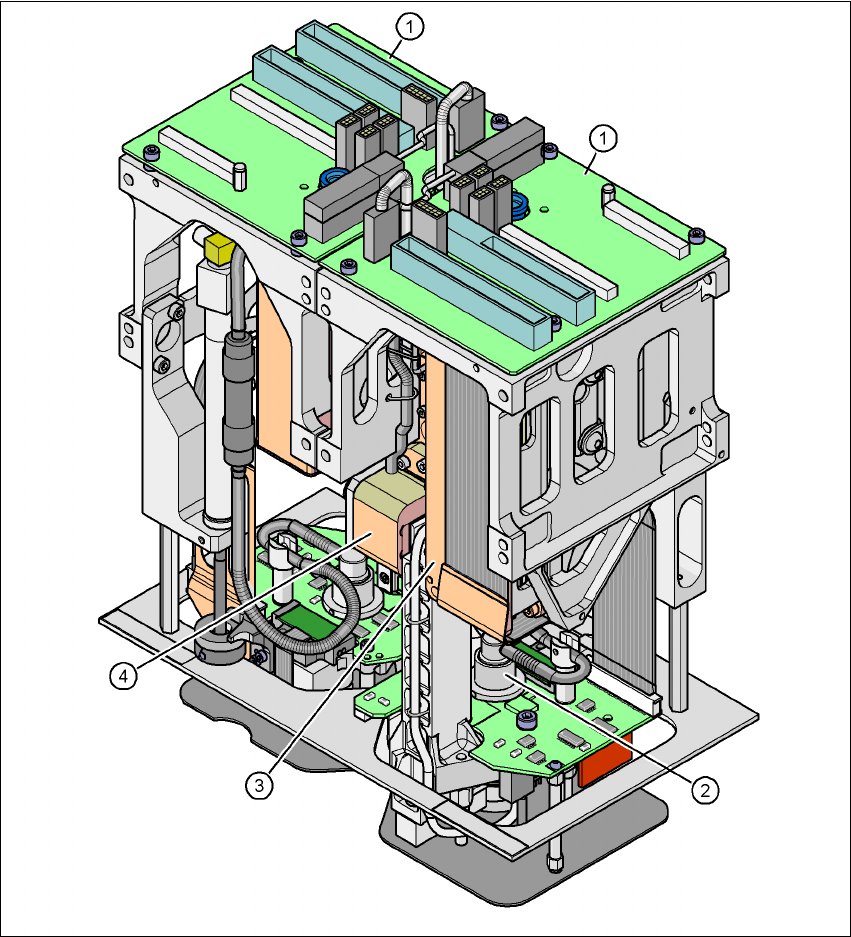
Fig. 3.7 - 9 TwinHead para montagem de PCI de alta precisão
3
(1) O módulo Pick&Place da TwinHead é composto por 2 módulos Pick&Place
(2) Eixo DP
(3) Acionamento do eixo Z
(4) Sistema incremental de medição da distância para o eixo Z

Manual do usuário SIPLACE Série HF 3 Dados técnicos
Versão de software SR.50x.xx Edição 01/2006 PT 3.7 Cabeças de montar
129
3.7.4.1 Descrição
Esta cabeça de montar altamente evoluída é composta por duas cabeças de montar do mesmo
tipo (TwinHead ou gémeas) ligadas entre si que trabalham segundo o princípio Pick&Place. O sis-
tema TwinHead é próprio para a maquinagem de componentes particularmente exigentes e gran-
des. Dois componentes são retirados da cabeça de montar, centrados opticamente no trajecto
para a posição de montagem e rodados para a necessária posição de montar. Seguidamente, são
colocados sobre a PCI com suavidade e na posição rigorosa por meio de sopro de ar regulado.3
Para o sistema TwinHead foram estudados novos bocais (Tipo 5xx). Um adaptador permite utili-
zar também os bocais da cabeça Pick&Place do Tipo 4xx e os bocais das cabeças Collect&Place
dos Tipos 8xx e 9xx. 3
Funções de controle e de auto aprendizagem 3
Diferentes funções de controlo e auto aprendizagem aumentam a confiabilidade do sistema
TwinHead. 3
– Testes de vácuo nos bocais mostram, por exemplo, se o componente foi retirado ou colocado
corretamente.
– Módulos de visão de alta resolução e inteligentes - como p.ex. módulos de visão Fine-Pitch
e Flip-Chip – detectam os mais pequenos desvios da posição do CO, corrigem os mesmos
e garantem, assim, uma posição de montagem correta. As câmaras de componentes estão
colocadas de forma estacionária no quadro da máquina.
– Além disso, também é verificada a forma da caixa. Se os dados geométricos determinados
forem diferentes dos dados programados, o componente não é montado.
– As forças de colocação previamente definidas para os componentes são medidas e contro-
ladas por um sensor de força.
– Em caso de falha de ar comprimido ou de corrente elétrica, o eixo vertical (eixo Z) sobe para
uma posição segura para evitar um embate da cabeça.
3.7.4.2 Descrição do funcionamento
A TwinHead é composta por duas cabeças Pick&Place acopladas entre si, comandadas indepen-
dentemente uma da outra. Cada cabeça possui dois eixos: o eixo Z e o eixo DP (veja a Fig. 3.7
- 8). 3
O trajecto de deslocação do eixo Z é registado por um sistema linear de medição incremental
de alta resolução. O eixo Z executa um movimento vertical. Um motor linear faz subir e descer
o eixo Z. Desta forma, componentes são retirados de alimentadores ou de bandejas e descidos
sobre a PCI. Ao eixo Z é dado o nome de "eixo inteligente". "Regista" a altura de recolha de cada
trilha do alimentador e a altura de montagem para cada componente. Assim, é possível acelerar
o processo de montagem. A força de colocação programada é medida e controlada por um sen-
sor de força. 3