JM-20_维修调整要领书.pdf - 第13页
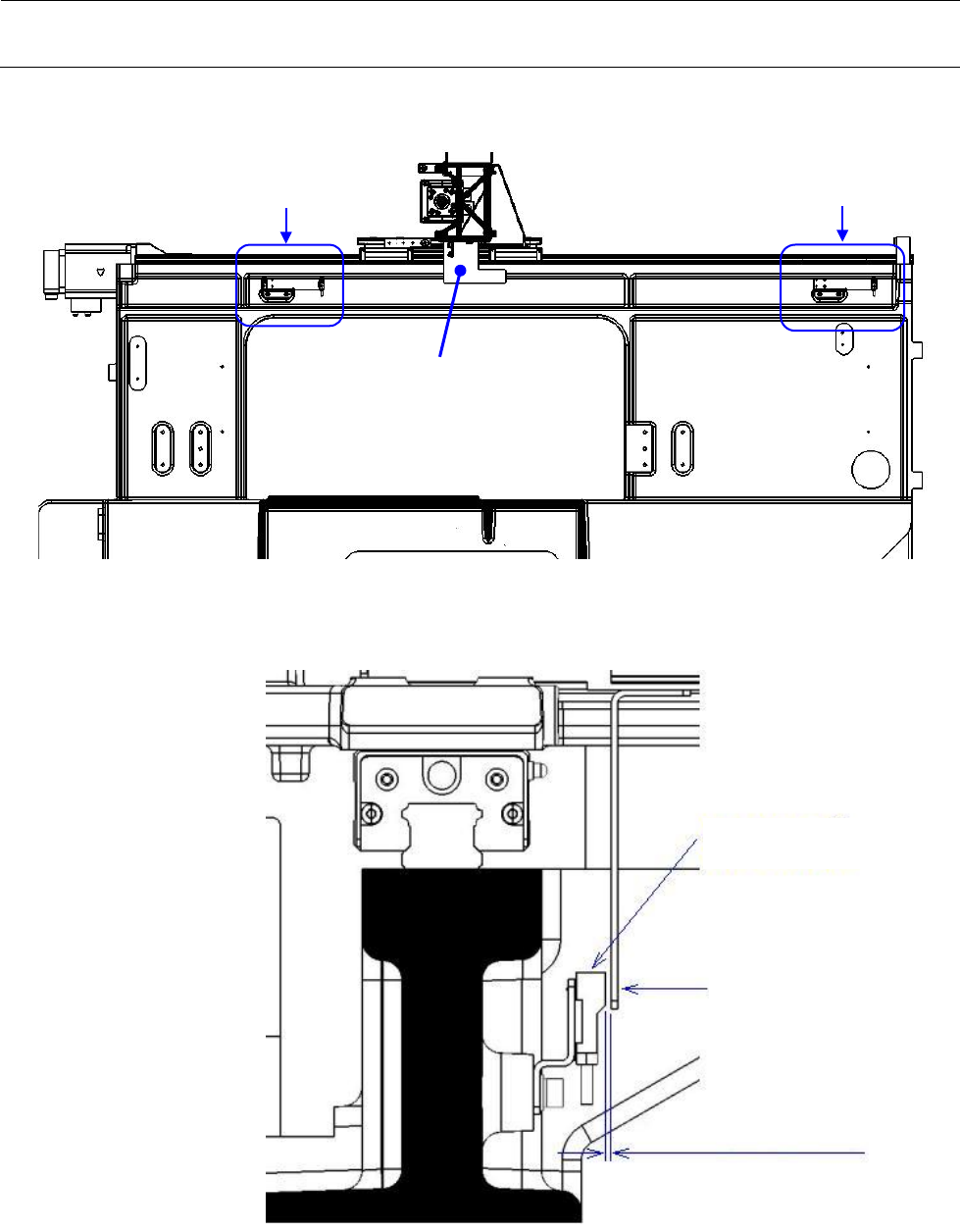
维修调整要领书 1-6 2 ) 后方固定时,要使 Y 传感器碰块与传感器表面的空隙为 1.0 ~ 1.9 mm (目标是 1.5 mm )。 Y 传感器碰块 Y 传感器 BR_F 组件 Y 传感器 BR_R 组件 1.0 ~ 1.9 (目标是 1.5 mm ) Y 传感器 BR_F 组件 Y 传感器 BR_ R 组件 Y 传感器碰块
维修调整要领书
1-5
1-2-2.
Y 轴极限传感器、Y 轴原点附近传感器的更换
※ 更换传感器时,不需要调整位置。
※ 包括支架也更换时,需要调整位置。
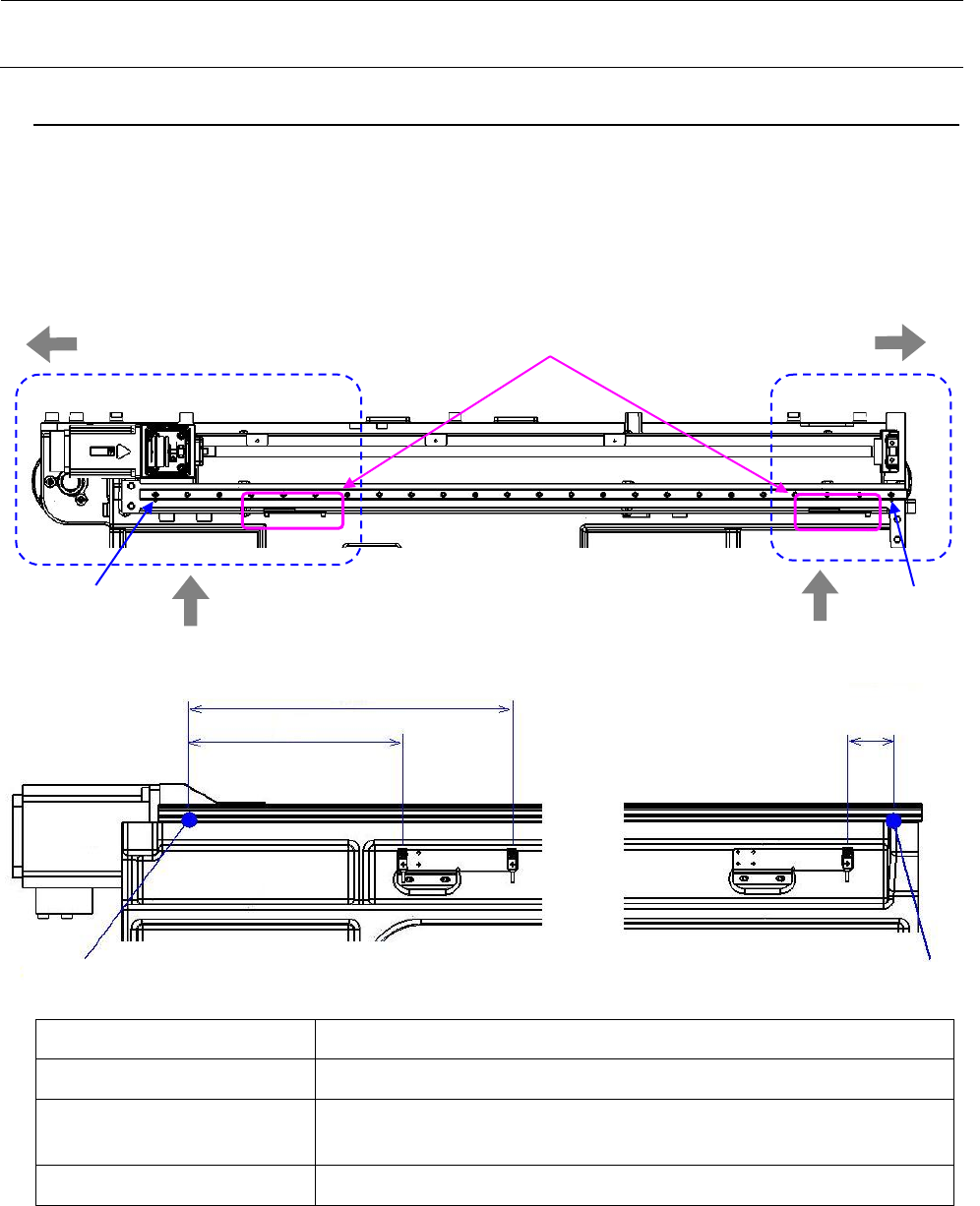
1) 松开 Y 极限传感器托架的止动螺丝进行调整,离开座架之开尾销安装中心位置的距离要成为下图
所示的尺寸,然后予以固定。
前侧(Y 负侧极限传感器) 从座架前侧开尾销安装中心位置到传感器中心的距离:208mm
前侧 2(Y 接近传感器) 从座架前侧开尾销安装中心位置到传感器中心的距离:315mm
后侧 2(Y 正正侧极限传感器
)
从座架后侧开尾销安装中心位置到传感器中心的距离
L 规格:43.5mm、XL 规格:48.5mm
极限传感器与碰块的空隙 1.0~1.9mm(目标是 1.5mm)
开尾销
开尾销
向视A
Y极限传感器
向视B
前
后
209
315
L 规格:43.5
XL 规格:48.5
开尾销孔部
开尾销孔部
维修调整要领书
1-6
2) 后方固定时,要使 Y 传感器碰块与传感器表面的空隙为 1.0~1.9mm(目标是 1.5mm)。
Y 传感器碰块
Y 传感器 BR_F 组件
Y 传感器 BR_R 组件
1.0~1.9(目标是 1.5mm)
Y 传感器 BR_F 组件
Y 传感器 BR_R 组件
Y 传感器碰块
维修调整要领书
1-7
1-2-3.
极限传感器的动作确认
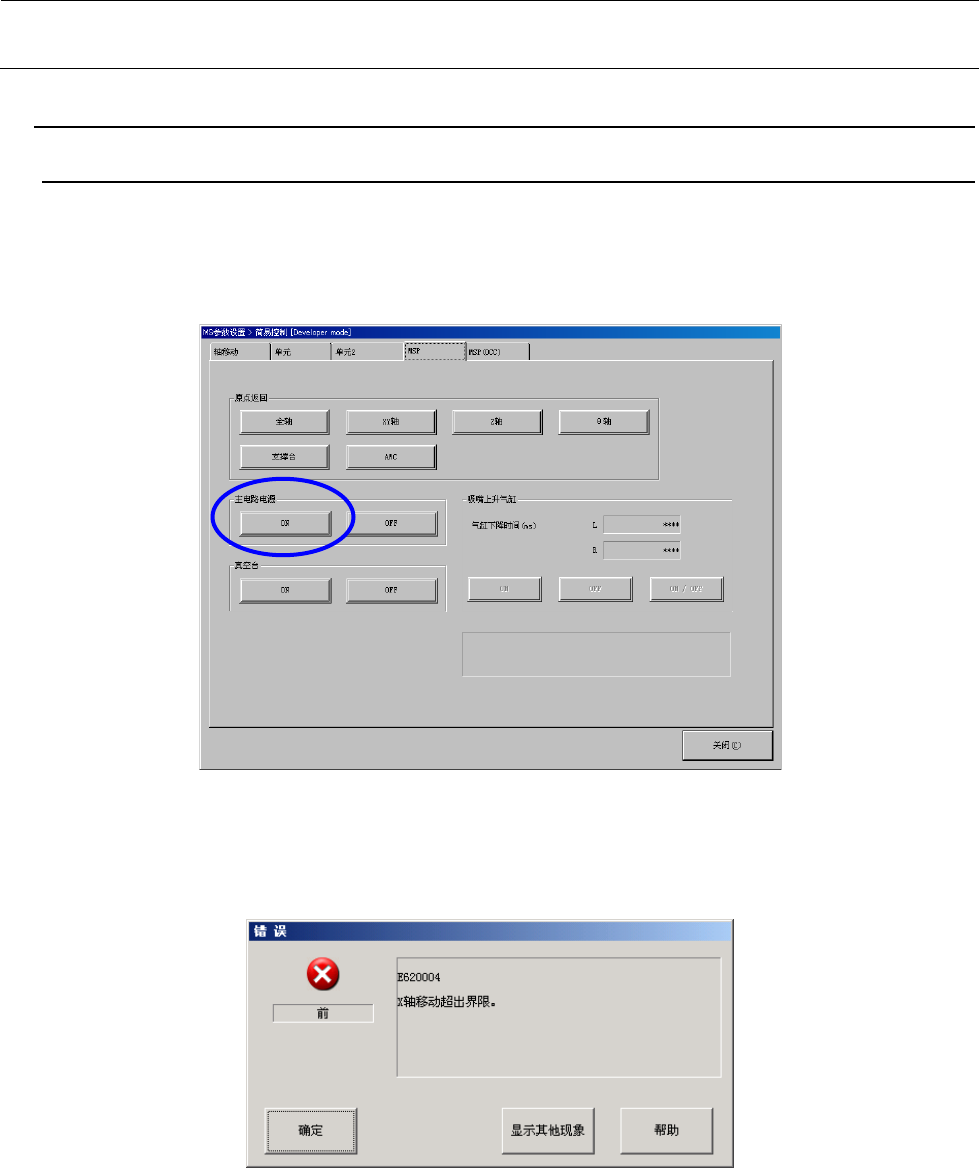
1-2-3-1. X 极限传感器的动作确认
1) 更换传感器后,启动机器会显示“原点复归”的对话框,请取消之,不进行原点复归。
2) 请从主机软件的维护菜单中选择 MS 参数设置。
3) 请在 MS 参数画面上启动简易控制,选择 MSP 选项卡内的“主电路电源”的 ON。
4) -X 极限传感器的动作确认。以手动将 Head 向左侧移动到-X 极限传感器被关掉的位置。
此时,请确认监视器上弹出 X 轴移动极限的对话框。
5) 请将 Head 移动到右侧,解除-X 极限传感器。
6) 解除后,与第 3)步的操作一样请接通主电路电源,关闭监视器的 X 轴移动极限显示。